Systems, Modulation and Noise
asymmetric sideband
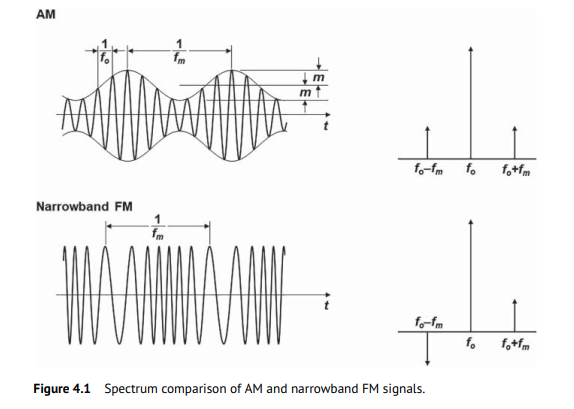
The spectrum of the narrowband FM signal is very similar to that of an amplitude modulation (AM) signal but has the phase reversal for the other sideband component
Assume the modulation frequency of PM and AM are same, \(\omega_m\)
\[\begin{align} x(t) &= (1+A_m\cos{\omega_m t})\cos(\omega_0 t + P_m \sin\omega_m t) \\ &= \cos(\omega_0 t + P_m \sin\omega_m t) + A_m\cos{\omega_m t}\cos(\omega_0 t + P_m \sin\omega_m t) \\ &= X_{pm}(t) + X_{apm}(t) \end{align}\]
\(X_{pm}(t)\), PM only part \[ X_{pm}(t) = \cos\omega_0 t - \frac{P_m}{2}\cos(\omega_0 - \omega_m)t + \frac{P_m}{2}\cos(\omega_0 + \omega_m)t \] \(X_{apm}(t)\), AM & PM part \[\begin{align} X_{apm}(t) &= A_m \cos{\omega_m t} (\cos\omega_0 t-P_m\sin\omega_m t\sin\omega_0 t) \\ &= \frac{A_m}{2}[\cos(\omega_0 + \omega_m)t + \cos(\omega_0 -\omega_m)t] - \frac{A_mP_m}{2}\sin(2\omega_m t)\sin(\omega_0 t) \\ &= \frac{A_m}{2}\cos(\omega_0 + \omega_m)t + \frac{A_m}{2}\cos(\omega_0 -\omega_m)t - \frac{A_mP_m}{4}\cos(\omega_0 - 2\omega_m)t + \frac{A_mP_m}{4}\cos(\omega_0 + 2\omega_m)t \end{align}\]
That is \[\begin{align} x(t) &= \cos\omega_0 t + \frac{A_m-P_m}{2}\cos(\omega_0 - \omega_m)t + \frac{A_m+P_m}{2}\cos(\omega_0 + \omega_m)t \\ &\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space - \frac{A_mP_m}{4}\cos(\omega_0 - 2\omega_m)t + \frac{A_mP_m}{4}\cos(\omega_0 + 2\omega_m)t \end{align}\]
For general case, \(x(t) = (1+A_m\cos{\omega_{am} t})\cos(\omega_0 t + P_m \sin\omega_{pm} t)\), i.e., PM is \(\omega_{pm}\), AM is \(\omega_{am}\)
\[\begin{align} x(t) &= \cos\omega_0 t - \frac{P_m}{2}\cos(\omega_0 - \omega_{pm})t + \frac{P_m}{2}\cos(\omega_0 + \omega_{pm})t \\ &\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space + \frac{A_m}{2}\cos(\omega_0 - \omega_{am})t + \frac{A_m}{2}\cos(\omega_0 + \omega_{am})t \\ &\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space - \frac{A_mP_m}{4}\cos(\omega_0 - \omega_{pm}-\omega_{am})t + \frac{A_mP_m}{4}\cos(\omega_0 + \omega_{pm}+\omega_{am})t \\ &\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space + \frac{A_mP_m}{4}\cos(\omega_0 + \omega_{pm}-\omega_{am})t - \frac{A_mP_m}{4}\cos(\omega_0 - \omega_{pm}+\omega_{am})t \end{align}\]
Therefore, sideband is asymmetric if \(\omega_{pm} = \omega_{am}\)
Ken Kundert, Measuring AM, PM & FM Conversion with SpectreRF [https://designers-guide.org/analysis/am-pm-conv.pdf]
Modulation of WSS process
Balu Santhanam, Probability Theory & Stochastic Process 2020: Modulation of Random Processes
modulated with a random cosine
modulated with a deterministic cosine
Hayder Radha, ECE 458 Communications Systems Laboratory Spring 2008: Lecture 7 - EE 179: Introduction to Communications - Winter 2006–2007 Energy and Power Spectral Density and Autocorrelation

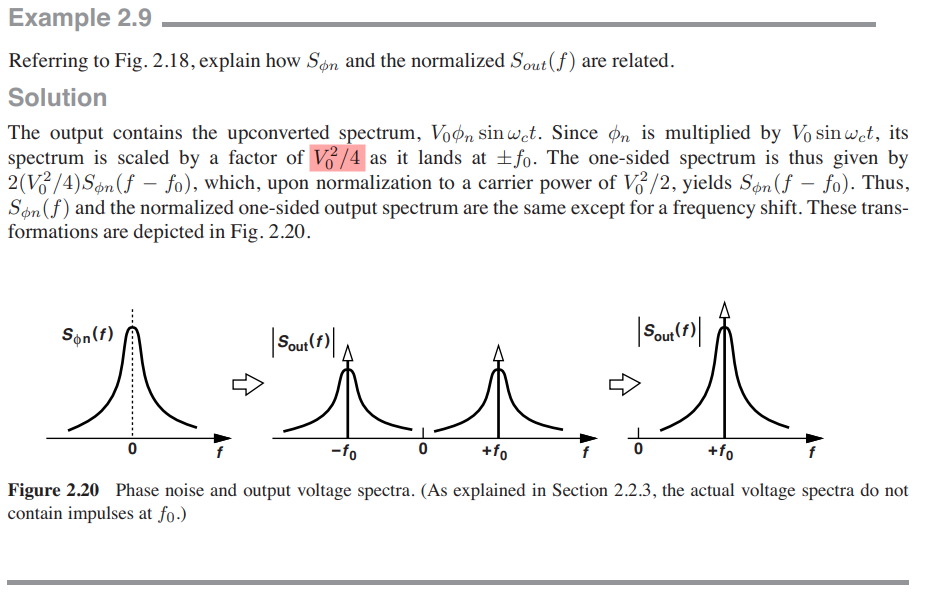
Sampling of WSS process
Balu Santhanam, Probability Theory & Stochastic Process 2020: Impulse sampling of Random Processes
DT sequence \(x[n]\)
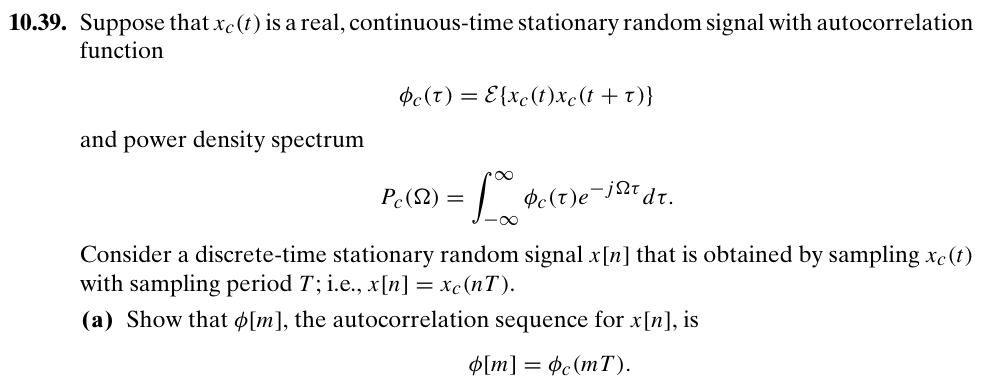
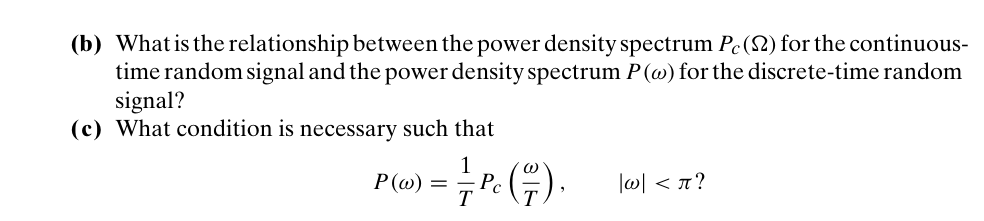
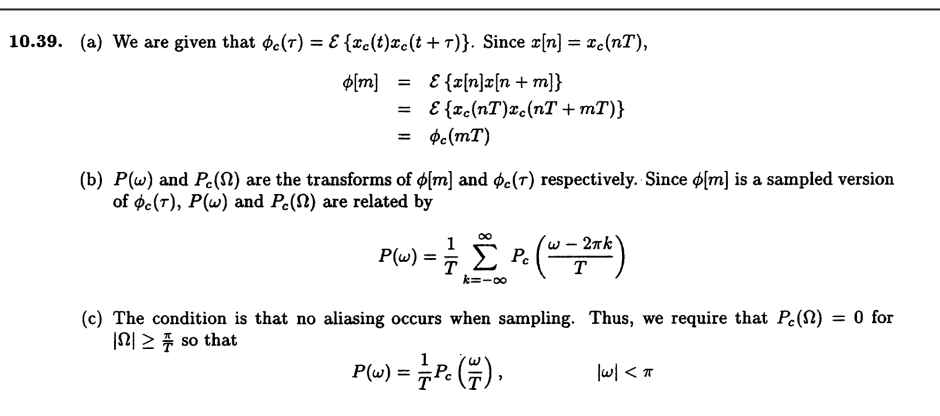
impulse train \(x_s(t)\)
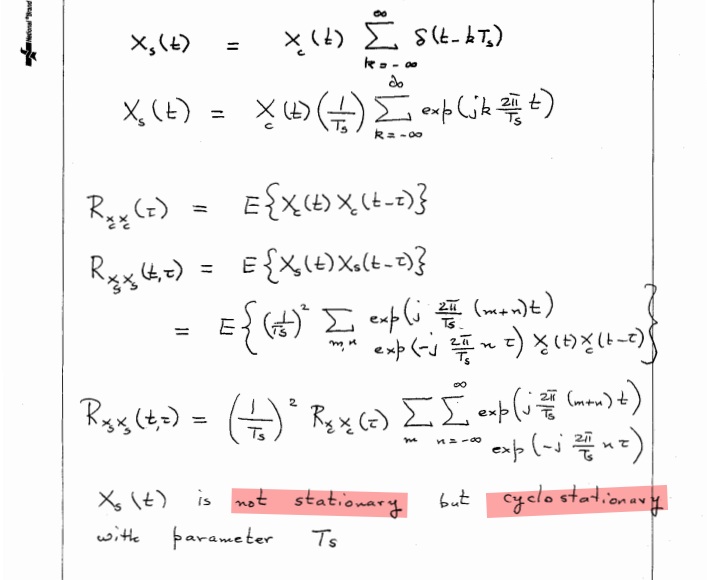
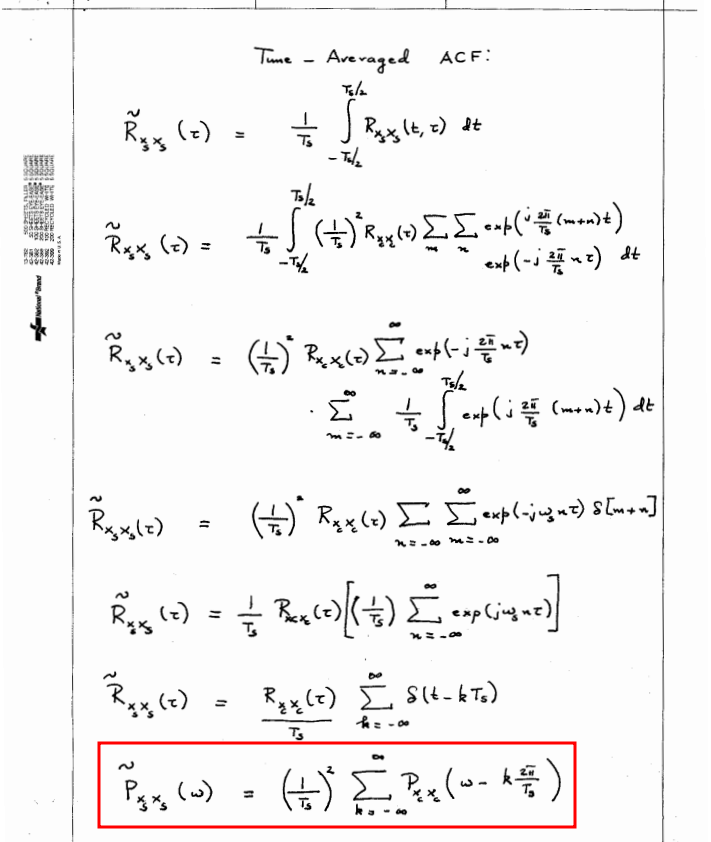
That is \[ P_{x_s x_s} (f)= \frac{1}{T_s^2}P_{xx}(f) \] where \(x[n]\) is sampled discrete-time sequence, \(x_s(t)\) is sampled impulse train
Noise Aliasing
apply foregoing observation
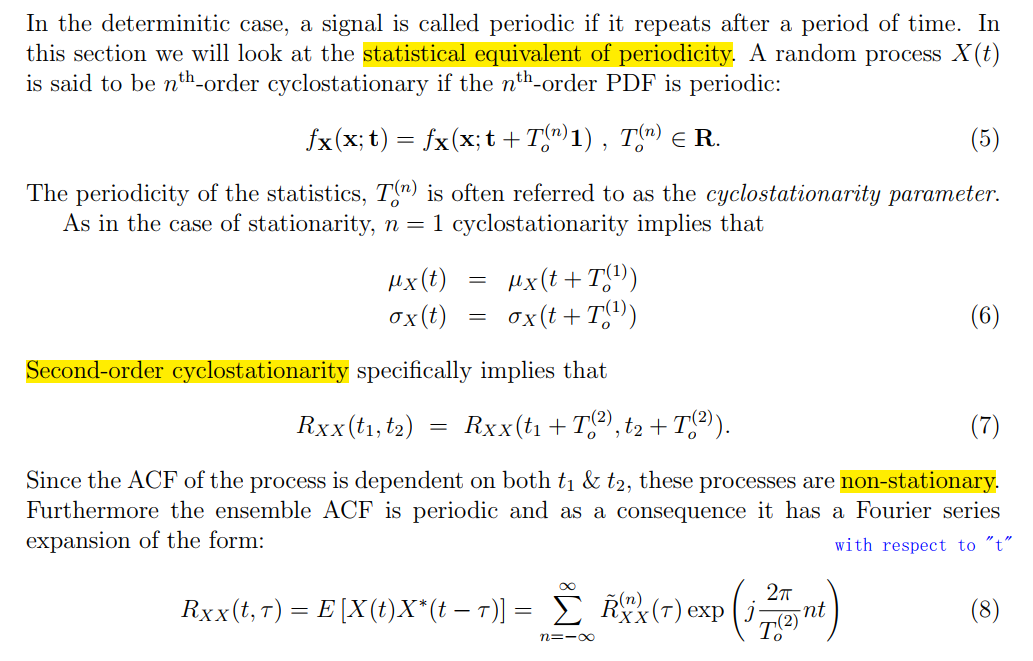
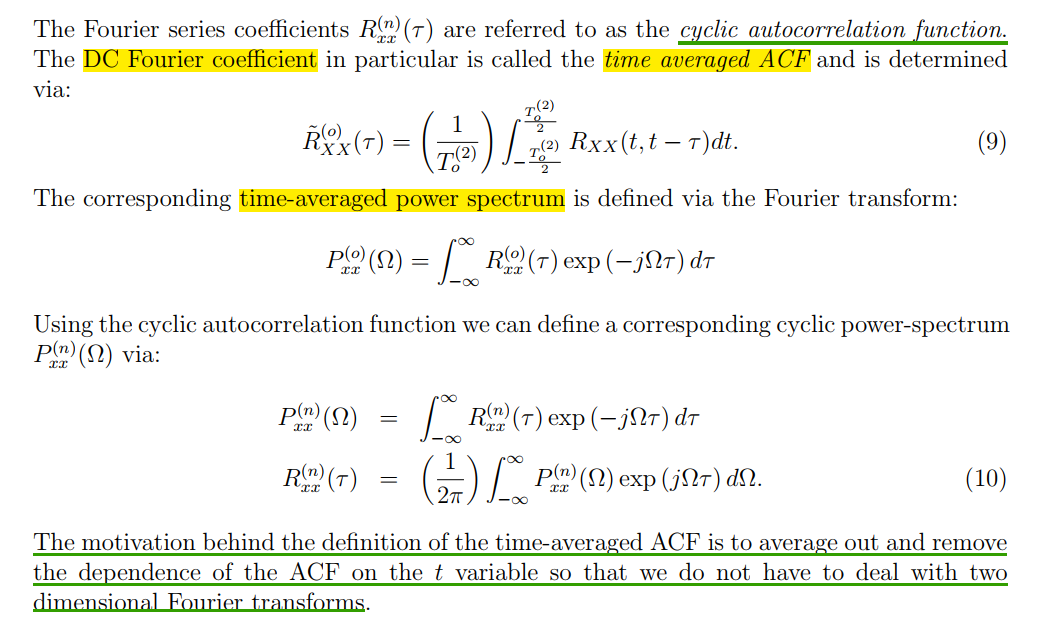
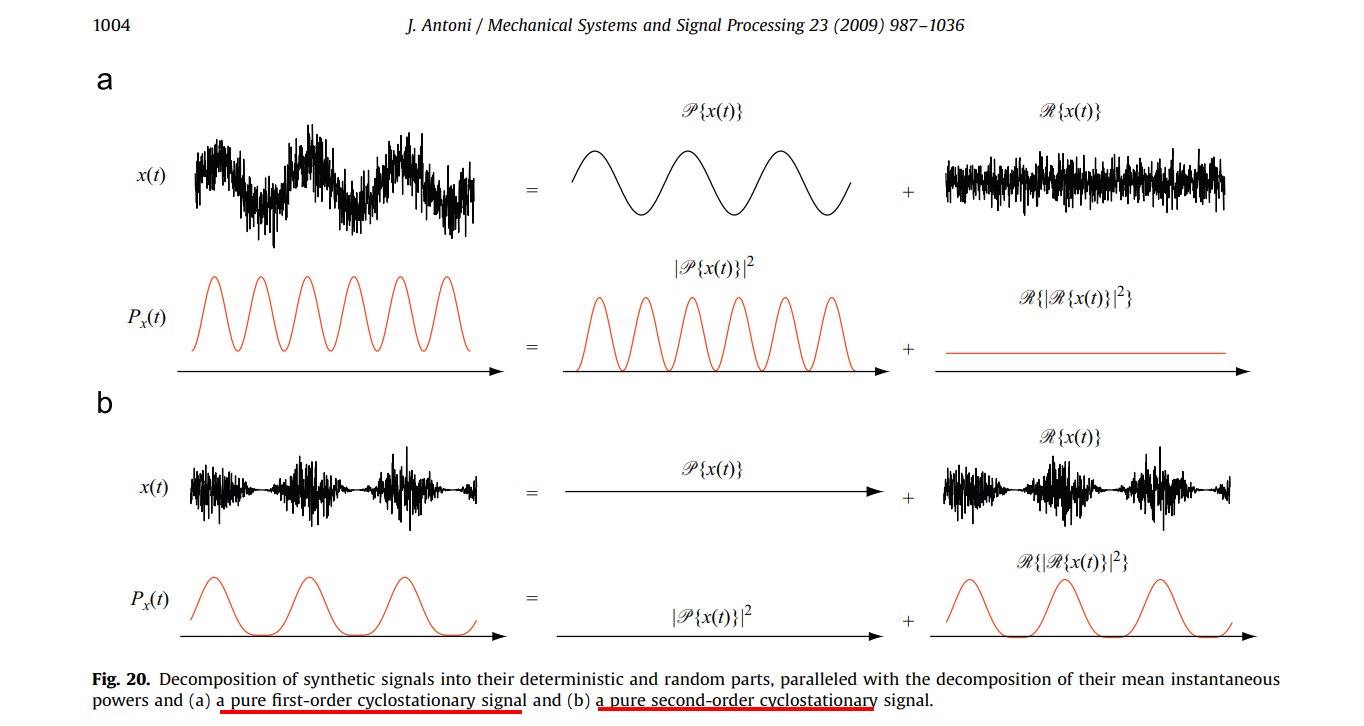
Cyclostationary Noise (Modulated Noise)
[https://ece-research.unm.edu/bsanthan/ece541/cyclo.pdf]
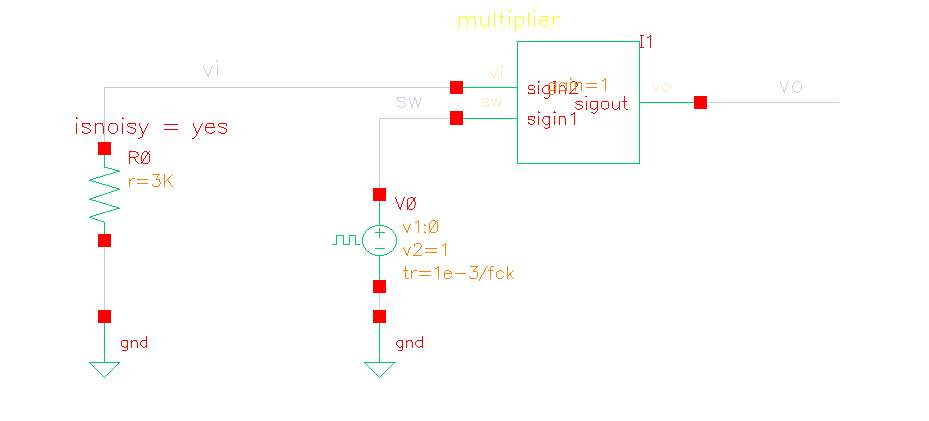
White Noise Modulation
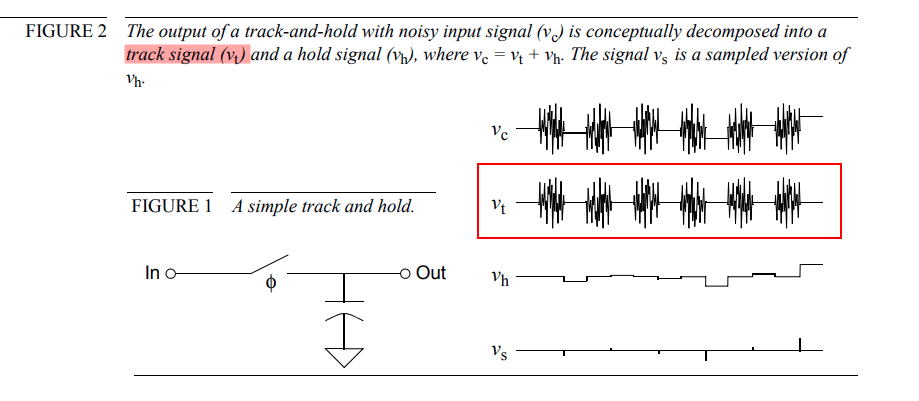
Noisy Resistor & Clocked Switch
\[ v_t (t) = v_i(t)\cdot m_t(t) \] where \(v_i(t)\) is input white noise, whose autocorrelation is \(A\delta(\tau)\), and \(m_t(t)\) is periodically operating switch, then autocorrelation of \(v_t(t)\) \[\begin{align} R_t (t_1, t_2) &= E[v_t(t_1)\cdot v_t(t_2)] \\ &= R_i(t_1, t_2)\cdot m_t(t_1)m_t(t_2) \end{align}\]
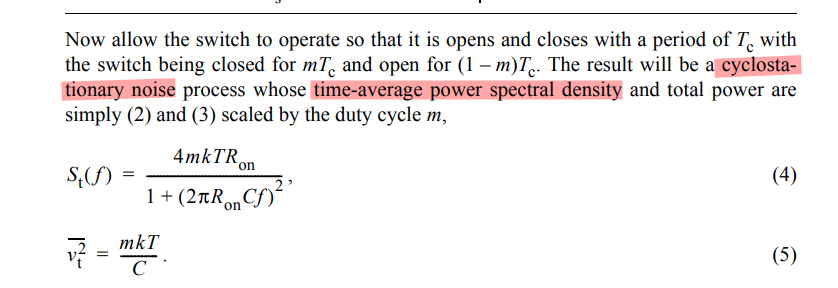
Then \[\begin{align} R_t(t, t-\tau) &= R_i(\tau)\cdot m_t(t)m_t(t-\tau) \\ & = A\delta(\tau) \cdot m_t(t)m_t(t-\tau) \\ & = A\delta(\tau) \cdot m_t(t) \end{align}\] Because \(m_t(t)=m_t(t+T)\), \(R_t(t, t-\tau)\) is is periodic in the variable \(t\) with period \(T\)
The time-averaged ACF is denoted as \(\tilde{R_t}(\tau)\)
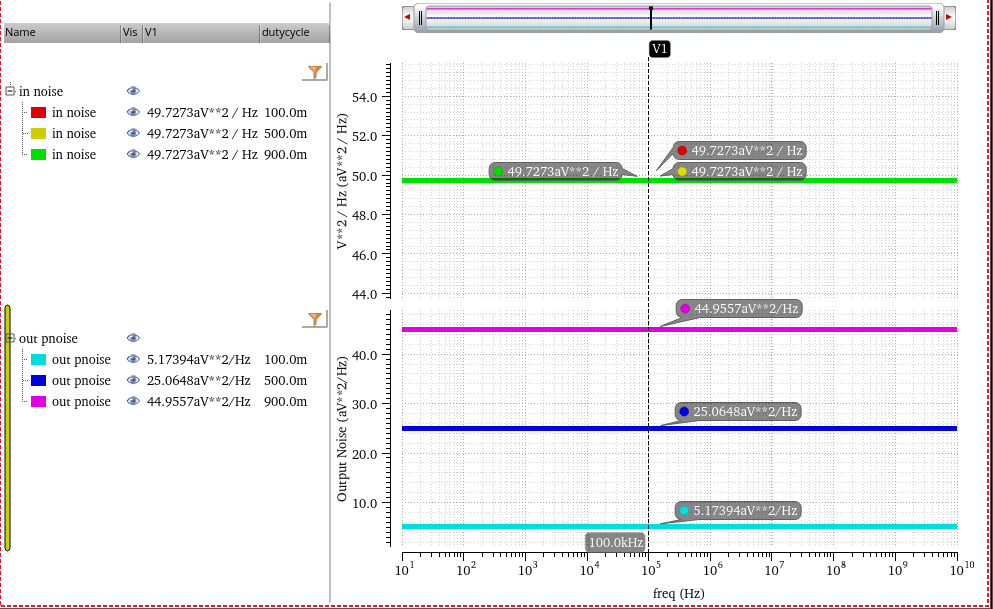
\[ \tilde{R}_{t}(\tau) = m\cdot A\delta(\tau) \] That is, \[ S_t(f) = m\cdot S_{A}(f) \]

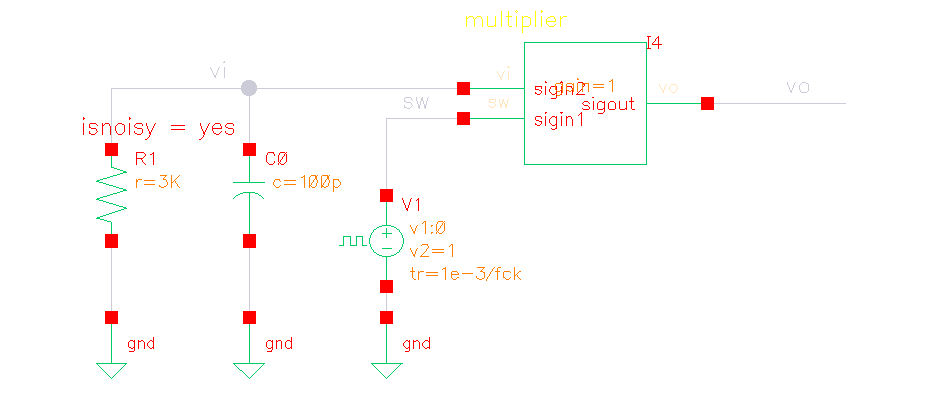
Colored Noise Modulation
 \[
\tilde{R_t}(\tau) = R_i(\tau)\cdot m_{tac}(\tau)
\]
\[
\tilde{R_t}(\tau) = R_i(\tau)\cdot m_{tac}(\tau)
\]
where \(m_t(t)m_t(t-\tau)\) averaged on \(t\) is denoted as \(m_{tac}(\tau)\) or \(\overline{m_t(t)m_t(t-\tau)}\)
The DC value of \(m_{tac}(\tau)\) can be calculated as below
for \(m\le 0.5\), the DC value of \(m_{tac}(\tau)\) \[ \frac{m\cdot mT}{T} = m^2 \]
for \(m\gt 0.5\), the DC value of \(m_{tac}(\tau)\) \[ \frac{(m+2m-1)(1-m)T + (2m-1)\{mT -(1-m)T\}}{T} = m^2 \]
Therefore, time-average power spectral density and total power are scaled by \(m^2\) in fundamental frequency sideband
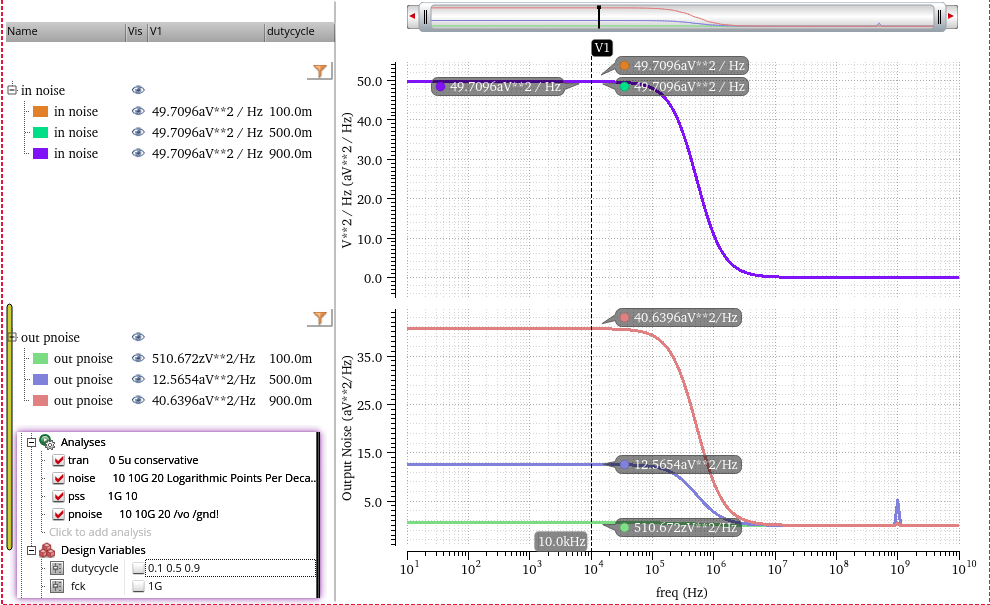
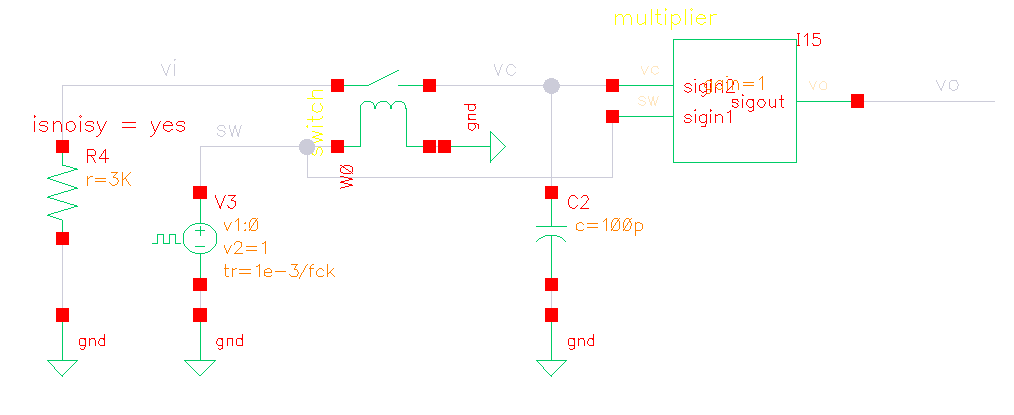
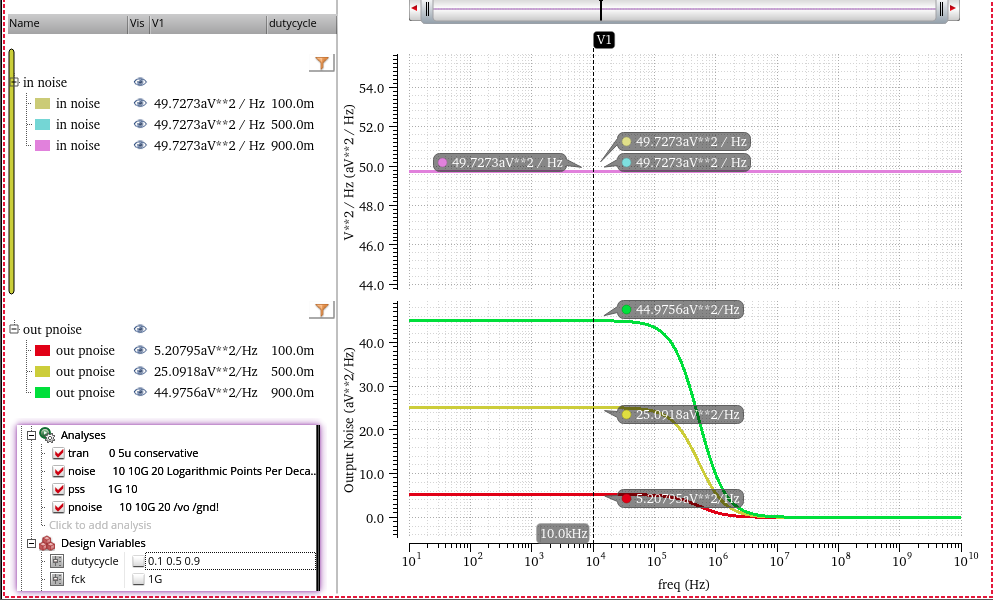
Switched-Capacitor Track signal
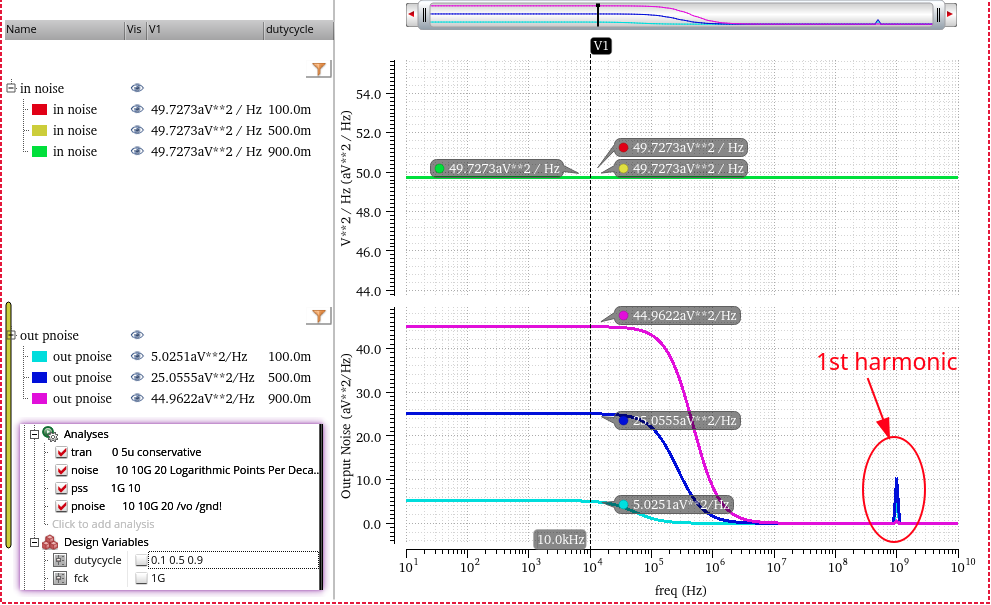
track signal pnoise (sc)
zoom in first harmonic by linear step of pnoise
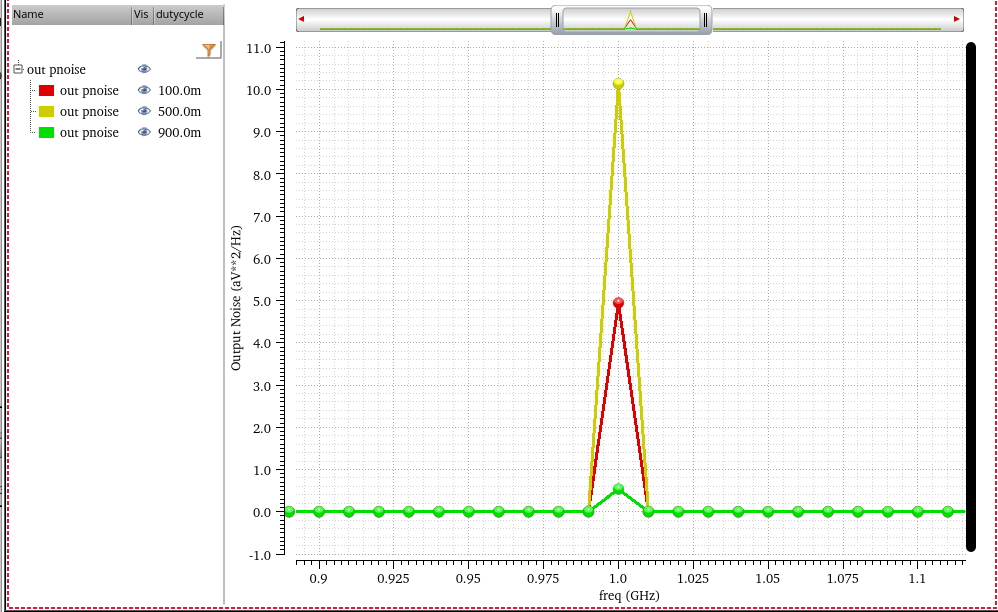
decreasing the rising/falling time of clock, the harmonics still retain
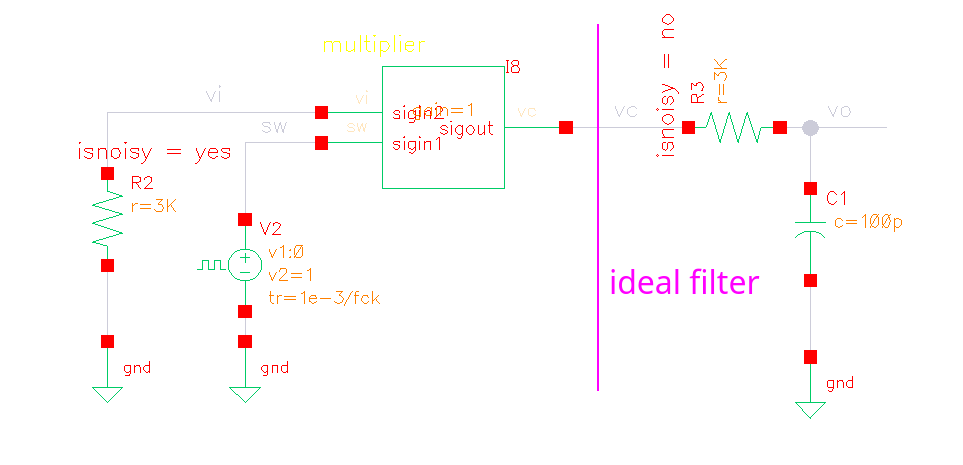
equivalent circuit for pnoise (eq)
- thermal noise of R is modulated at first
- then filtered by ideal filter
sc vs eq
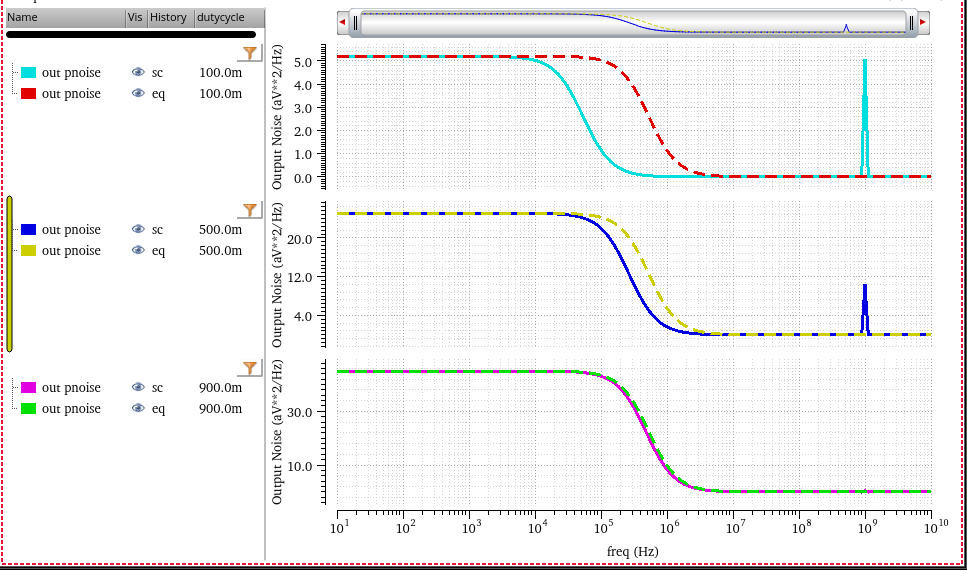
- sc: harmonic distortion
- eq: no harmonic distortion
Non-Stationary Processes
Wide-Sense-Stationary Noise
Much like sinusoidal-steady-state signal analysis, steady-state noise analysis methods assume an input x(t) of infinite duration, which is a Wide-Sense Stationary (WSS) random process
Frequency-domain Analysis
Time-domain Analysis
The output \(y(t)\) of a linear time-invariant (LTI) system \(h(t)\) \[\begin{align} R_{yy}(\tau) &= R_{xx}(\tau)*[h(\tau)*h(-\tau)] \\ &= S_{xx}(0)\delta(\tau) * [h(\tau)*h(-\tau)] \\ &= S_{xx}(0)[h(\tau)*h(-\tau)] \\ &= S_{xx}(0) \int_\alpha h(\alpha)h(\alpha-\tau)d\alpha \end{align}\]
with WSS white noise input \(x(t)\), \(R_{xx}(\tau)=S_{xx}(0)\delta(\tau)\), therefore

Non-stationary Noise
Assuming the noise applied duration is much less than the time constant, the output voltage does not reach steady-state and WSS noise analysis does not apply
In order to determine the response of an LTI system to a step noise input, the problem is more conveniently solved in the time-domain
input signal: step ramp input
noise current: step
Time-domain Analysis

The step noise input \(x(t) =
\nu(t)u(t)\) \[
R_{xx}(t_1,t_2) = E[x(t_1)x(t_2)] = R_{\nu\nu}(t_1,
t_2)u(t_1)u(t_2)=R_{\nu\nu}(t_1, t_2)
\] 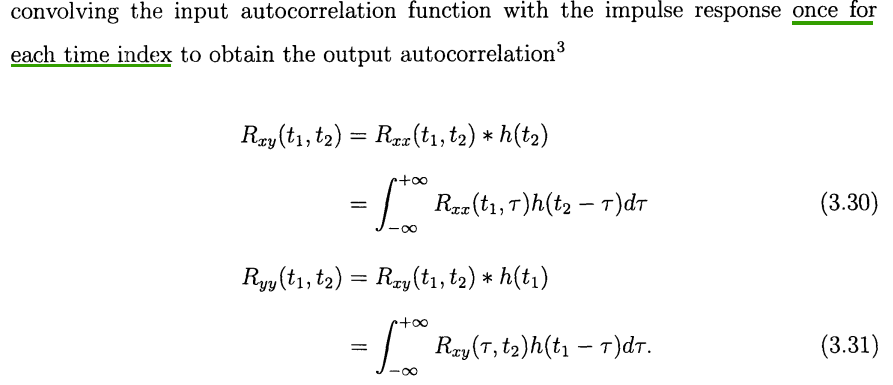
\[ R_{xy}(t_1, t_2) = E[x(t_1)y(t_2)] = E[x(t_1)(x(t_2)*h(t_2))] = E(x(t_1)x(t_2))*h(t_2) = R_{xx}(t_1,t_2)*h(t_2) \]
\[ R_{yy}(t_1,t_2) = E[y(t_1)y(t_2)] = E[(x(t_1)*h(t_1))y(t_2)] = E[x(t_1)y(t_2)]*h(t_1)=R_{xy}(t_1,t_2)*h(t_1) \]

the absolute value of each time index is important for a non-stationary signal, and only the time difference was important for WSS signals
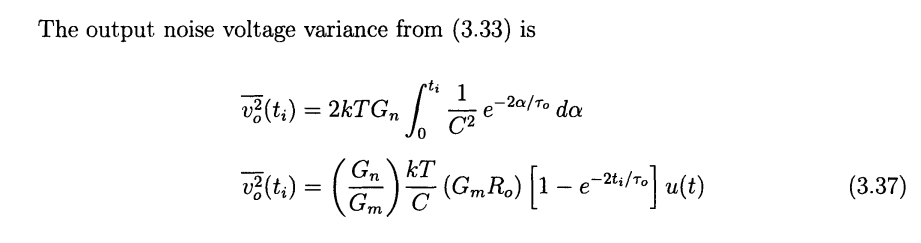
\[\begin{align} R_{yy}(t_1,t_2) &= h(t_1)*R_{\nu\nu}(t_1, t_2)*h(t_2) \\ &= h(t_1)*S_{xx}(0)\delta(t_2-t_1)*h(t_2) \\ &=S_{xx}(0) h(t_1)*(\delta(t_2-t_1)*h(t_2)) \\ &= S_{xx}(0)h(t_1)*h(t_2-t_1) \\ &= S_{xx}(0)\int_\tau h(\tau)h(t_2-t_1+\tau))d\tau \end{align}\]
That is \[ \sigma^2_y (t)= R_{yy}(t_1,t_2)|_{t_1=t_2=t}=S_{xx}(0)\int_{-\infty}^t |h(\tau)|^2d\tau \]
\(t\), the upper limit of integration is just intuitive, which lacks strict derivation
Because stable systems have impulse responses that decay to zero as time goes to infinity, the output noise variance approaches the WSS result as time approaches infinity
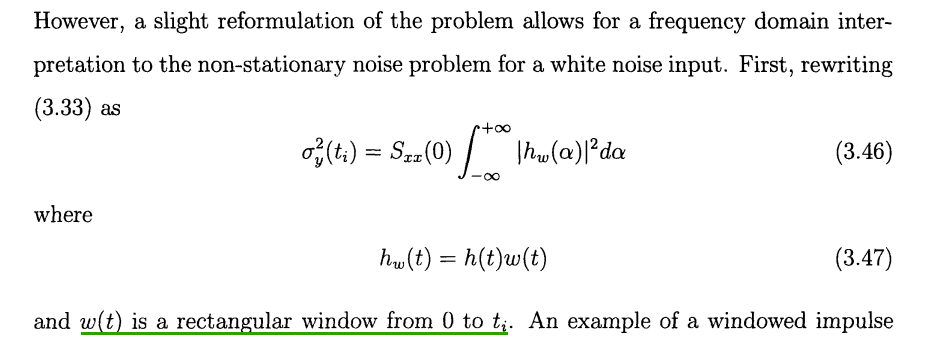
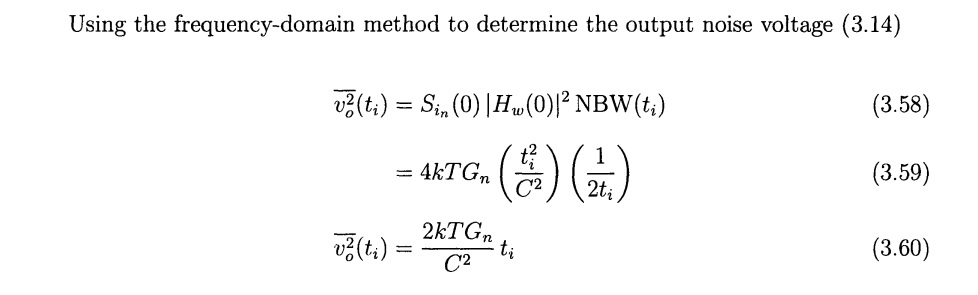
Frequency-domain Analysis
Because the definition of the PSD assumes that the variance of the noise process is independent of time, the PSD of a non-stationary process is not very meaningful
Input Referred Noise

Noise Voltage to Timing Jitter Conversion & noise gain
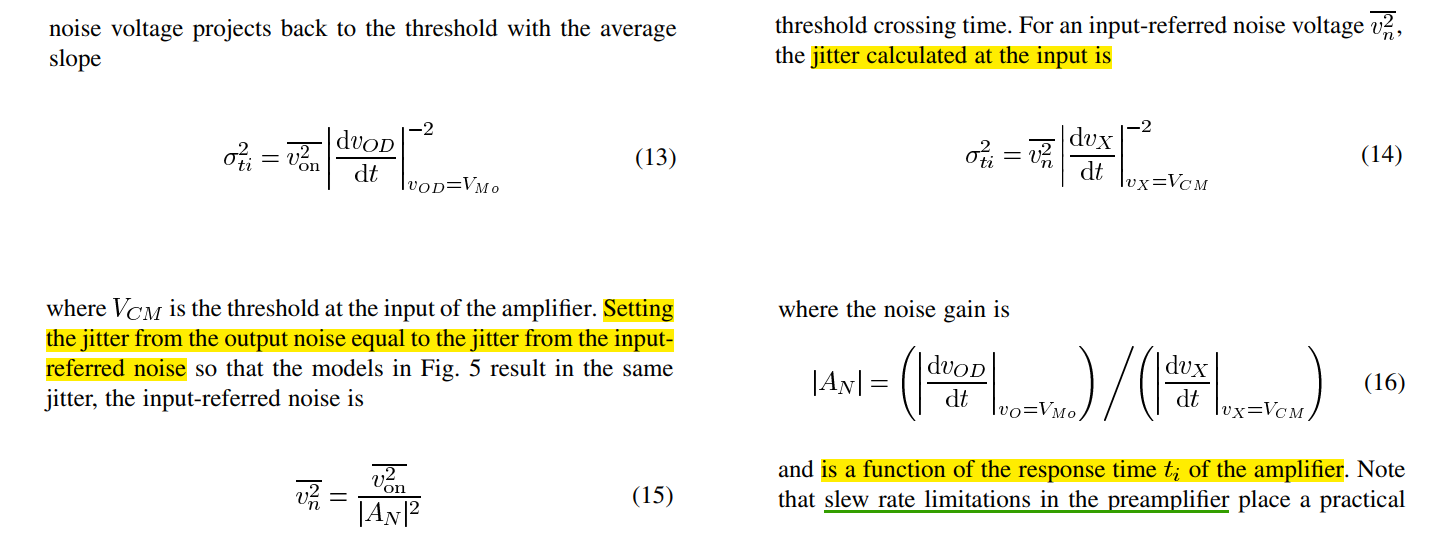
with a step ramp input \(v_X(t) = Mtu(t)\)
The noise gain is \[
|A_N(t_i)| = A_0 (1-e^{t_i/\tau_o})u(t)
\] where \(t_i\) is crossing
time of ideal threshold comparator
\[\begin{align}
\overline{v_n^2} &= \frac{\overline{v_{on}^2}}{|A_N|^2} \\
&=
\frac{G_n}{G_m}\frac{kT}{C}\frac{1}{A_0}\frac{1+e^{-t_i/\tau_o}}{1-e^{-t_i/\tau_o}}
\\
&=4kT\frac{G_n}{G_m^2}\frac{1}{4R_oC} \coth(\frac{t_i}{2\tau_o}) \\
&= 4kTR_n\frac{1}{4\tau_o} \coth(\frac{t_i}{2\tau_o})
\end{align}\]
where \(R_n = \frac{G_n}{G_m^2}\), the equivalent thermal noise resistance
reference
Alan V Oppenheim, Ronald W. Schafer. Discrete-Time Signal Processing, 3rd edition [pdf]
R. E. Ziemer and W. H. Tranter, Principles of Communications, 7th ed., Wiley, 2013 [pdf]
John G. Proakis and Masoud Salehi, Fundamentals of communication systems 2nd ed [pdf]
Rhee, W. and Yu, Z., 2024. Phase-Locked Loops: System Perspectives and Circuit Design Aspects. John Wiley & Sons
Phillips, Joel R. and Kenneth S. Kundert. "Noise in mixers, oscillators, samplers, and logic: an introduction to cyclostationary noise." Proceedings of the IEEE 2000 Custom Integrated Circuits Conference. [pdf, slides]
Antoni, J., "Cyclostationarity by examples", Mechanical Systems and Signal Processing, vol. 23, no. 4, pp. 987–1036, 2009 [https://docente.unife.it/docenti/dleglc/a-a-2010-2011-dmsm/ciclostazionarieta.pdf]
Kundert, Ken. (2006). Simulating Switched-Capacitor Filters with SpectreRF. URL:https://designers-guide.org/analysis/sc-filters.pdf
STEADY-STATE AND CYCLO-STATIONARY RTS NOISE IN MOSFETS [https://ris.utwente.nl/ws/portalfiles/portal/6038220/thesis-Kolhatkar.pdf]
Christian-Charles Enz. "High precision CMOS micropower amplifiers" [pdf]
T. Sepke, P. Holloway, C. G. Sodini and H. -S. Lee, "Noise Analysis for Comparator-Based Circuits," in IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 56, no. 3, pp. 541-553, March 2009 [https://dspace.mit.edu/bitstream/handle/1721.1/61660/Speke-2009-Noise%20Analysis%20for%20Comparator-Based%20Circuits.pdf]
Sepke, Todd. "Comparator design and analysis for comparator-based switched-capacitor circuits." (2006). [https://dspace.mit.edu/handle/1721.1/38925]