PID & Feedback
- proportional term (P) depends on the present error
- integral term (I) depends on past errors
- derivative term (D) depends on anticipated future errors
PID controller makes use of linear extrapolation of the measured output
PI controller does not make use of any prediction of the future state of the system
The prediction by linear extrapolation (D) can generate large undesired control signals because measurement noise is amplified, that's why D is not used widely
The Problem of "Sinusoids Running Around Loops"
The representative of Fourier transform \(\frac{1}{j\omega+j\omega_0}\) back in the time domain \(e^{-j\omega_0 t}\) is infinite extent in time
Running around a loop, chasing one's tail — these are thought pictures that only work in a discretized, time-sequenced conceptual framework that has a beginning and an end
Fix in your mind that oscillations are a type of resonance
System Type
Control of Steady-State Error to Polynomial Inputs: System Type
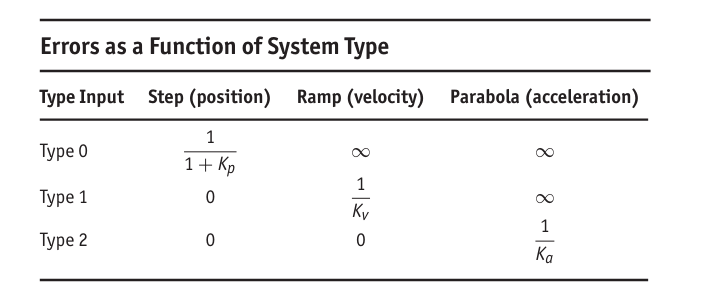
control systems are assigned a type number according to the maximum degree of the input polynominal for which the steady-state error is a finite constant. i.e.
- Type 0: Finite error to a step (position error)
- Type 1: Finite error to a ramp (velocity error)
- Type 2: Finite error to a parabola (acceleration error)
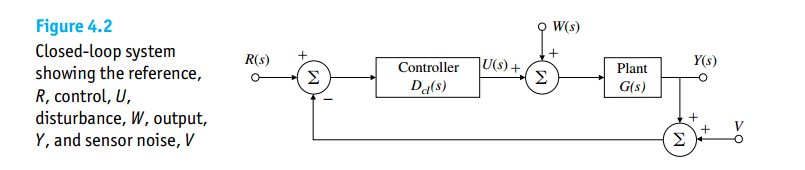
If we consider tracking the reference input alone and set \(W = V = 0\)
The open-loop transfer function can be expressed as \[ T(s) = \frac{K_n(s)}{s^n} \]
where we collect all the terms except the pole (\(s\)) at eh origin into \(K_n(s)\),
The polynomial inputs, \(r(t)=\frac{t^k}{k!} u(t)\), whose transform is \[ R(s) = \frac{1}{s^{k+1}} \]
Then the equation for the error, \(R(s)-Y(s)\) is simply \[ E(s) = \frac{1}{1+T(s)}R(s) \]
Application of the Final Value Theorem to the error formula gives the result
\[\begin{align} \lim _{t\to \infty} e(t) &= e_{ss} = \lim _{s\to 0} sE(s) \\ &= \lim _{s\to 0} s\frac{1}{1+\frac{K_n(s)}{s^n}}\frac{1}{s^{k+1}} \\ &= \lim _{s\to 0} \frac{s^n}{s^n + K_n}\frac{1}{s^k} \end{align}\]
- if \(n > k\), \(e=0\)
- if \(n < k\), \(e\to \infty\)
- if \(n=k\)
- \(e_{ss} = \frac{1}{1+K_n}\) if \(n=k=0\)
- \(e_{ss} = \frac{1}{K_n}\) if \(n=k \neq 0\)
where we define \(K_n(0) = K_n\)
rearrangement

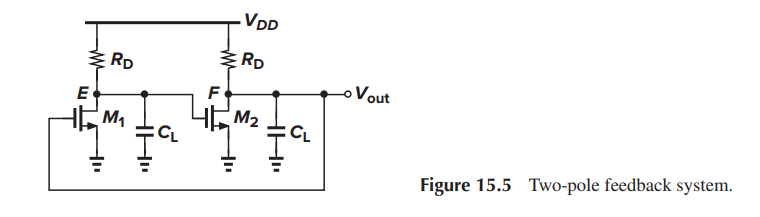
The closed loop transfer function of \(Y/X\) and \(Y_1/X_1\) are almost same, except sign
\[\begin{align} \frac{Y}{X} &= +\frac{H_1(s)H_2(s)}{1+H_1(s)H_2(s)} \\ \frac{Y_1}{X_1} &= -\frac{H_1(s)H_2(s)}{1+H_1(s)H_2(s)} \end{align}\]

define \(-Y_1=Y_n\), then \[
\frac{Y_n}{X_1} = \frac{H_1(s)H_2(s)}{1+H_1(s)H_2(s)}
\] 
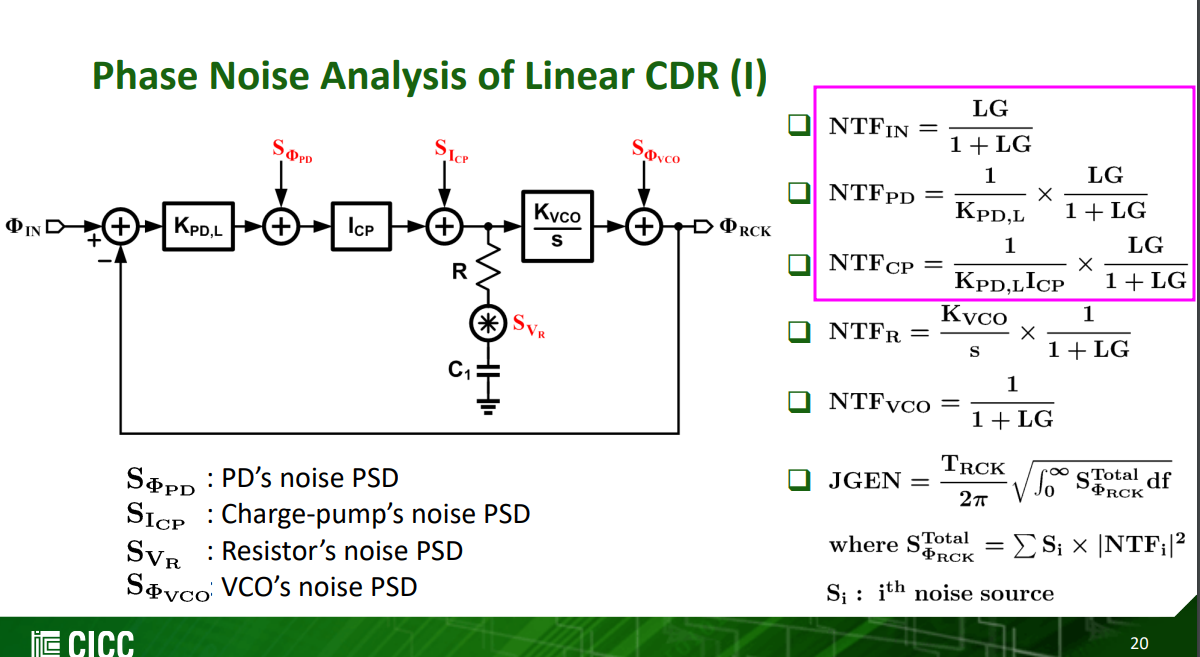
Saurabh Saxena, IIT Madras. CICC2022 Clocking for Serial Links - Frequency and Jitter Requirements, Phase-Locked Loops, Clock and Data Recovery
derivative control
Introduction: PID Controller Design. [https://ctms.engin.umich.edu/CTMS/?example=Introduction§ion=ControlPID]
Stability Criterion
Barkhausen criteria
Barkhausen criteria are necessary but not sufficient conditions for sustainable oscillations
it simply "latches up" rather than oscillates
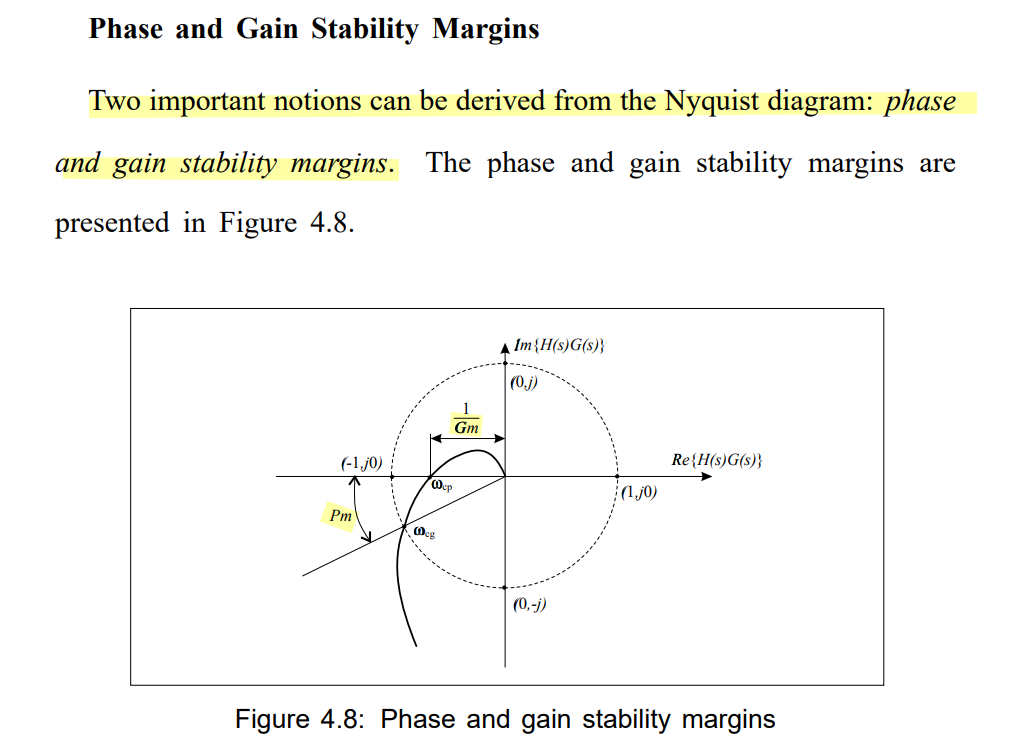
Nyquist Stability Criterion
Michael H. Perrott, High Speed Communication Circuits and Systems, Lecture 15 Integer-N Frequency Synthesizers[https://www.cppsim.com/CommCircuitLectures/lec15.pdf]
Zoran Gajic. Nyquist Stability Criterion [https://eceweb1.rutgers.edu/~gajic/psfiles/nyquist.pdf]
TODO 📅
reference
Gene F. Franklin, J. David Powell, and Abbas Emami-Naeini. Feedback Control of Dynamic Systems, Global Edition (8th Edition). Pearson. [pdf]
Åström, K.J. & Murray, Richard. (2021). Feedback Systems: An Introduction for Scientists and Engineers Second Edition [pdf]
Dawson, Joel L. A Guide to Feedback Theory. Cambridge: Cambridge University Press, 2021. [pdf]
Yan Lu, ISSCC2021 T10: Fundamentals of Fully Integrated Voltage Regulators [https://www.nishanchettri.com/isscc-slides/2021%20ISSCC/TUTORIALS/ISSCC2021-T10.pdf]
Jens Anders (University of Stuttgart, DE). ESSERC2025 Circuits Insights: The Magic of Feedback in Analog Circuit Design [https://youtu.be/NyXuA6WZ8Hg]