VLSI Digital Signal Processing
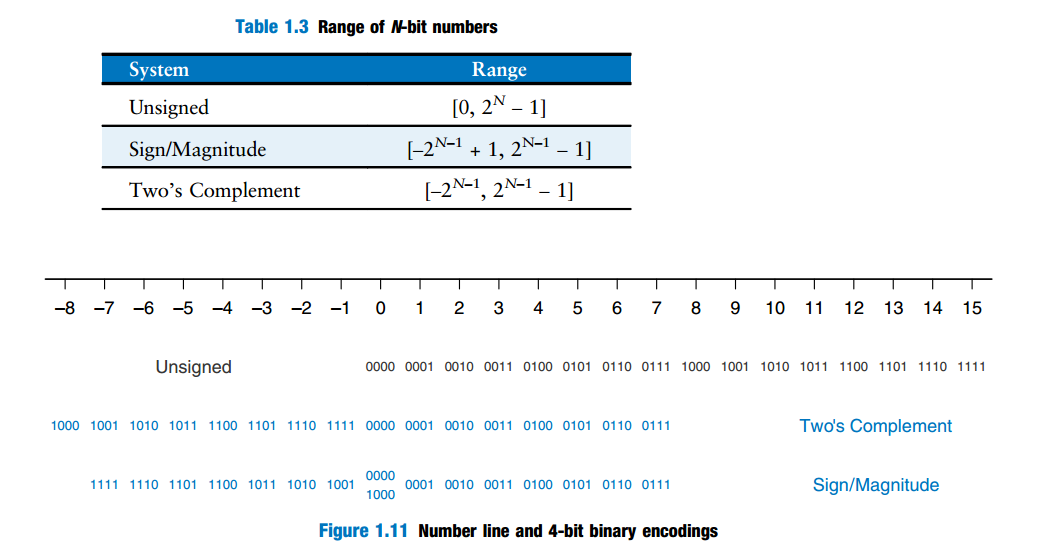
Number Systems
Harris, David Money, and Sarah L. Harris. Digital Design and Computer Architecture. 2nd ed. Morgan Kaufmann, 2013. [pdf]
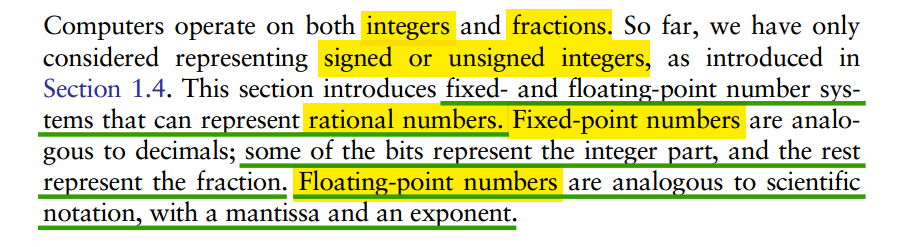
integers
rational number
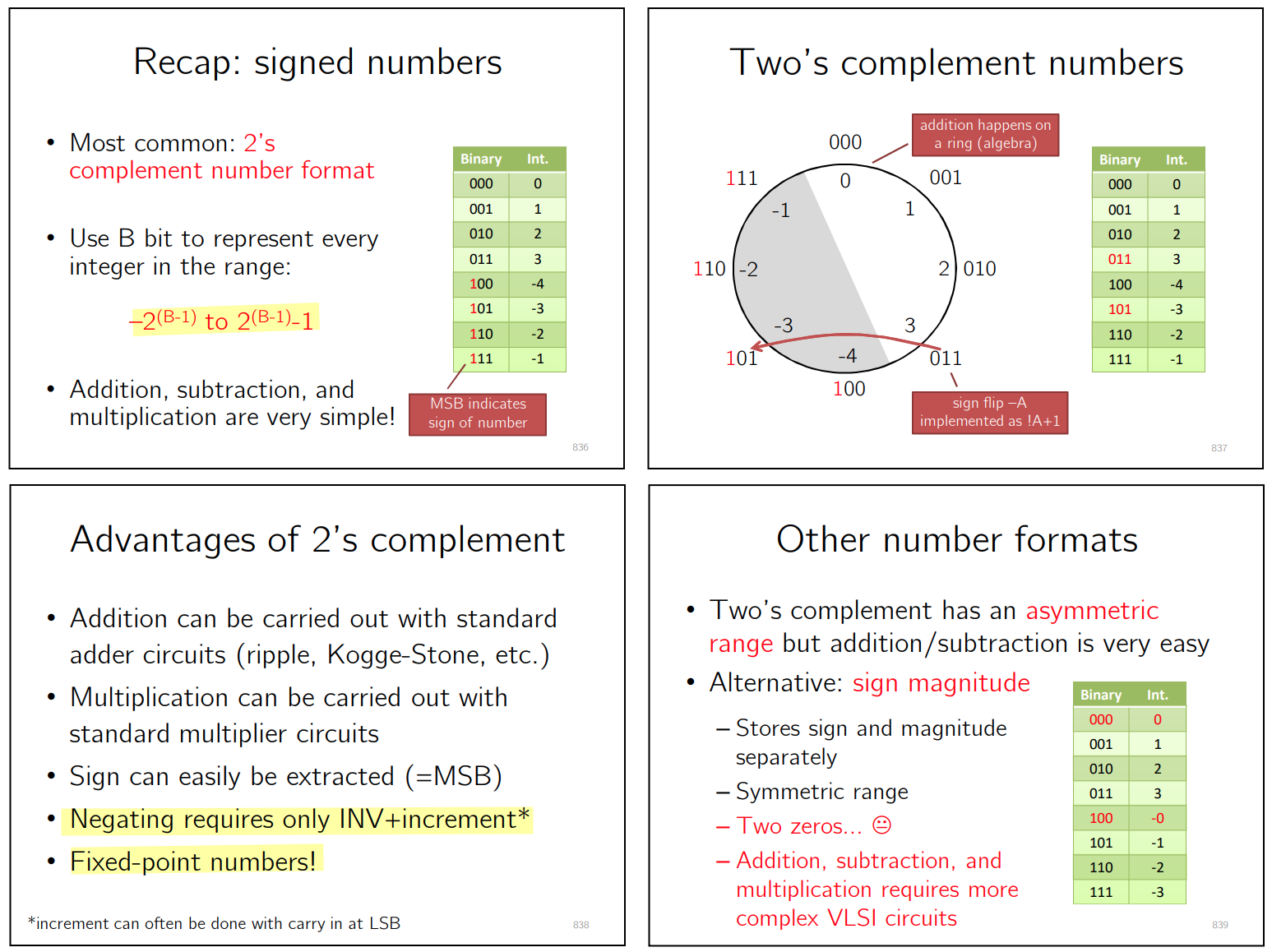
2's Complement
Google AI Mode [https://share.google/aimode/KsxxgDF0vAdhAIgm0]
2's complement negative number
Flip all bits then Add 1
N-bit signed number \[ A = -M_{N-1}2^{N-1}+\sum_{k=0}^{N-2}M_k2^k \] Flip all bits \[\begin{align} A_{flip} &= -(1-M_{N-1})2^{N-1} +\sum_{k=0}^{N-2}(1-M_k)2^k \\ &= M_{N-1}2^{N-1}-\sum_{k=0}^{N-2}M_k2^k -2^{N-1}+\sum_{k=0}^{N-2}2^k \\ &= M_{N-1}2^{N-1}-\sum_{k=0}^{N-2}M_k2^k -1 \end{align}\]
Add 1 \[ A_- = A_{flip}+1 = M_{N-1}2^{N-1}-\sum_{k=0}^{N-2}M_k2^k = -A \]
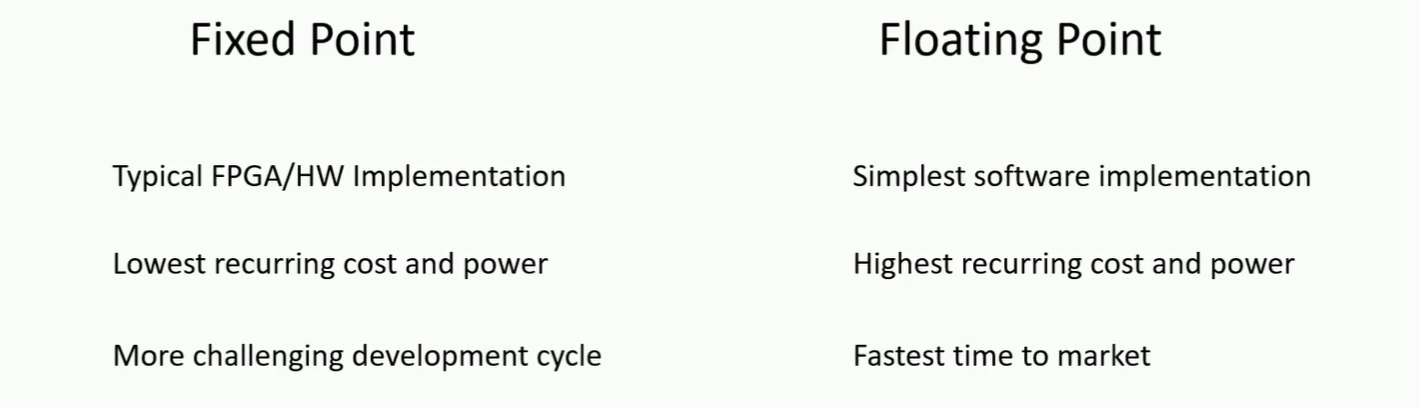
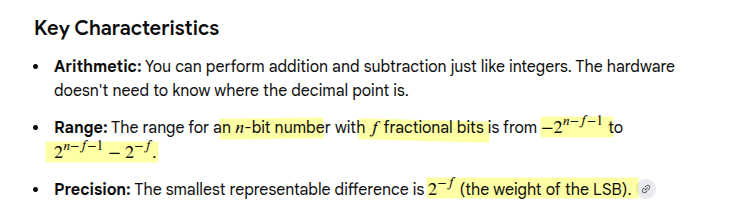
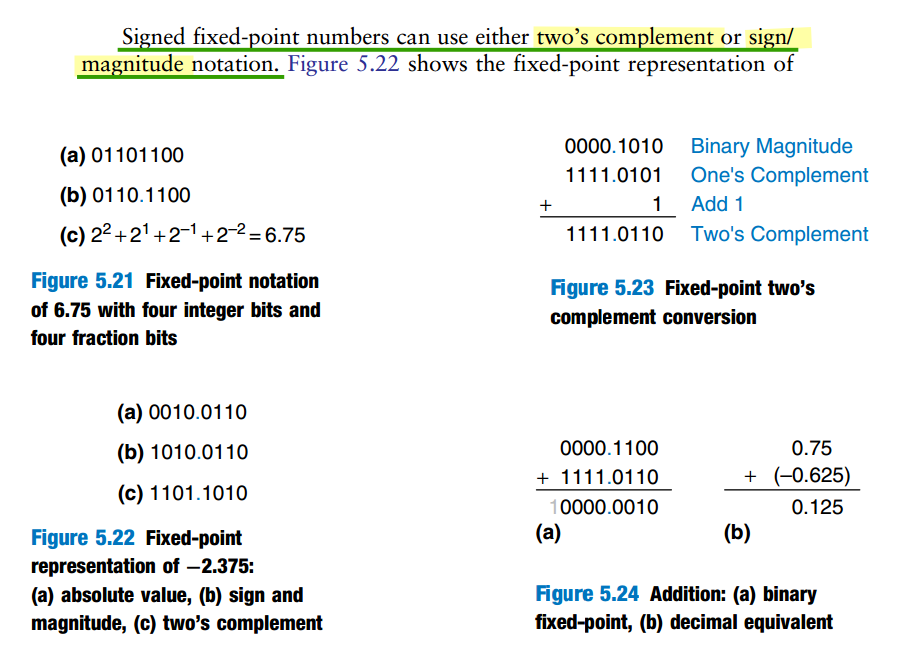
Fixed Point Number
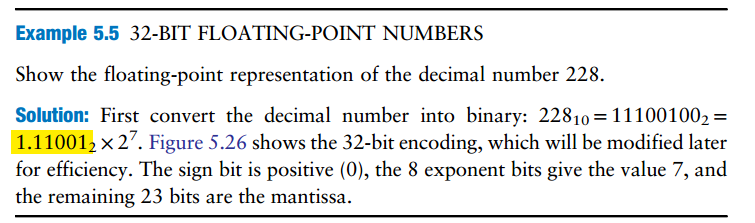
Floating Point Number
Dennis Forbes. Understanding Floating-Point Numbers [https://dennisforbes.ca/blog/features/floating_point/understanding-floating-point-numbers/]
IEEE Standard for Floating-Point Arithmetic [https://www-users.cse.umn.edu/~vinals/tspot_files/phys4041/2020/IEEE%20Standard%20754-2019.pdf]

| 32-bit floating-point version 1 | store implicit leading one |  |
| 32-bit floating-point version 2 | discard implicit leading one |  |
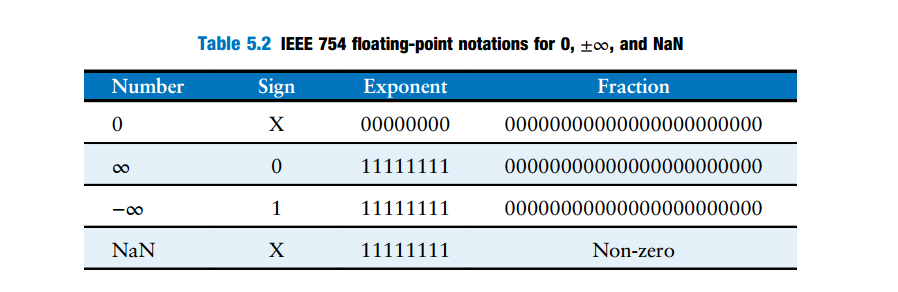
| IEEE 754 floating point notation | biased exponent | 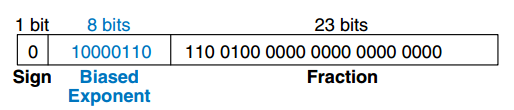 |
| Format | Exponent Bits | Bias (Decimal) | Representable Range |
|---|---|---|---|
| Single Precision (32-bit) | 8 | 127 | -126 to +127 |
| Double Precision (64-bit) | 11 | 1023 | -1022 to +1023 |
VLSI Arithmetic
TODO 📅
Word-Length Effects
Tianshuang Qiu; Ying Guo, "7. Finite-Precision Numerical Effects in Digital Signal Processing," in Signal Processing and Data Analysis , De Gruyter, 2018, pp.236-248
Antoniou, Andreas. “Digital Signal Processing: Signals, Systems, and Filters.” (2005). [pdf]
TODO 📅
RTL module
MakerCode RTL Challenge [https://github.com/Weiyet/MakerCode_RTLChallenge]
decimation_filter
Filter Equation
1 | filtered[n] = (1*x[n] + 3*x[n-1] + 3*x[n-2] + 1*x[n-3]) / 8 |
1 | iverilog -g2012 -o sim.vvp solution.sv tb.sv |
1 | module decimation_filter #( |
Line 34 uses non-blocking assignment:
1 | x1 <= data_in; // line 34: scheduled, NOT applied yet |
Non-blocking assignments don't take effect until the end of the current time step (after all the blocking statements in the block have run). So at line 37:
x1still holds its previous value — i.e. the sample from the lastdata_valid_incycle, which isx[n-1].data_inis the current sample,x[n].
They are different values. That's deliberate and necessary for the FIR math to be correct:
1 | filtered = 1*x[n] + 3*x[n-1] + 3*x[n-2] + 1*x[n-3] |
| Symbol | Value at line 37 | Filter tap |
|---|---|---|
data_in |
x[n] (current) | coeff 1 |
x1 |
x[n-1] | coeff 3 |
x2 |
x[n-2] | coeff 3 |
x3 |
x[n-3] | coeff 1 |

reference
Jabbour, Chadi, etc.. "Digitally enhanced mixed signal systems." IEEE International Symposium on Circuits and Systems (ISCAS). 2019.
Sen M. Kuo. Real-Time Digital Signal Processing: Fundamentals, Implementations and Applications, 3rd Edition. John Wiley & Sons 2013
Taylor, Fred. Digital filters: principles and applications with MATLAB. John Wiley & Sons, 2011
Kuo, Sen-Maw. (2013) Real-Time Digital Signal Processing: Implementations and Applications 3rd [pdf]
D. Markovic and R. W. Brodersen, DSP Architecture Design Essentials, Springer, 2012.
Bevan Baas, EEC281 VLSI Digital Signal Processing, [https://www.ece.ucdavis.edu/~bbaas/281/]
Mark Horowitz. EE371: Advanced VLSI Circuit Design Spring 2006-2007 [https://web.stanford.edu/class/archive/ee/ee371/ee371.1066/]
Tinoosh Mohsenin. CMPE 691: Digital Signal Processing Hardware Implementation [https://userpages.cs.umbc.edu/tinoosh/cmpe691/]
Keshab K. Parhi [http://www.ece.umn.edu/users/parhi/]
謝秉璇. 2019 積體電路設計導論 [link]
Jason Sachs. Understanding and Preventing Overflow (I Had Too Much to Add Last Night) [https://www.embeddedrelated.com/showarticle/532.php]
—. Round Round Get Around: Why Fixed-Point Right-Shifts Are Just Fine [https://www.embeddedrelated.com/showarticle/1015.php]
—. How to Build a Fixed-Point PI Controller That Just Works: Part I [https://www.embeddedrelated.com/showarticle/121.php]
—. How to Build a Fixed-Point PI Controller That Just Works: Part II [https://www.embeddedrelated.com/showarticle/123.php]
AHMED SHAHEIN, Fixed-Point Simulation in GNU Octave—Without MATLAB [https://www.dsprelated.com/showarticle/1786.php]
A. Antoniou, "On the roots of digital signal processing. Part I," in IEEE Circuits and Systems Magazine, vol. 7, no. 1, pp. 8-18, First Quarter 2007
—, "Feature - On the roots of digital signal processing - Part II," in IEEE Circuits and Systems Magazine, vol. 7, no. 4, pp. 8-19, Fourth Quarter 2007
Hideo Okawara's Mixed Signal Lecture Series [https://tomverbeure.github.io/2024/01/06/Hideo-Okawara-Mixed-Signal-Lecture-Series.html]