similar to increase the resolution of the flash ADC with
more parallel comparators
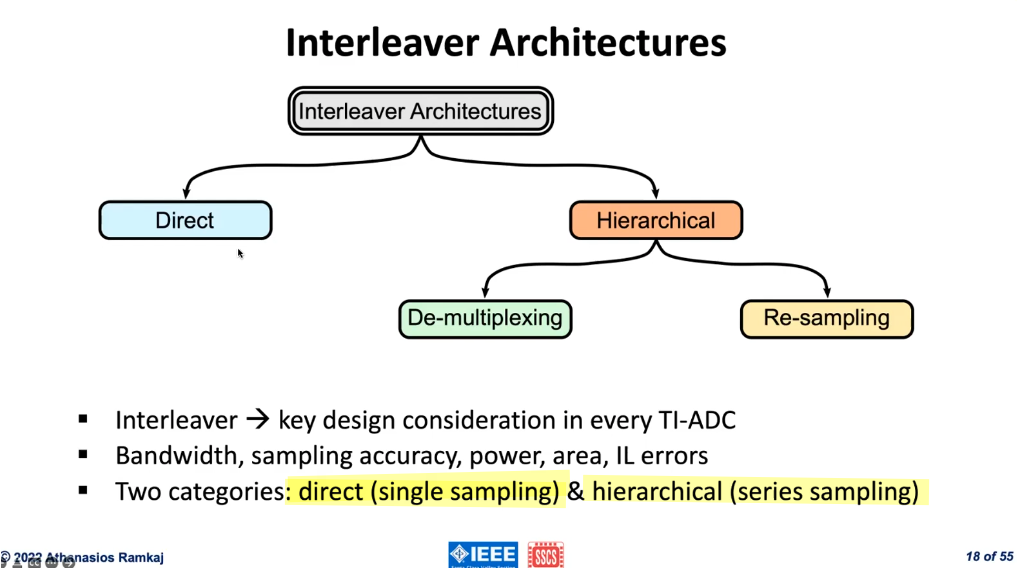
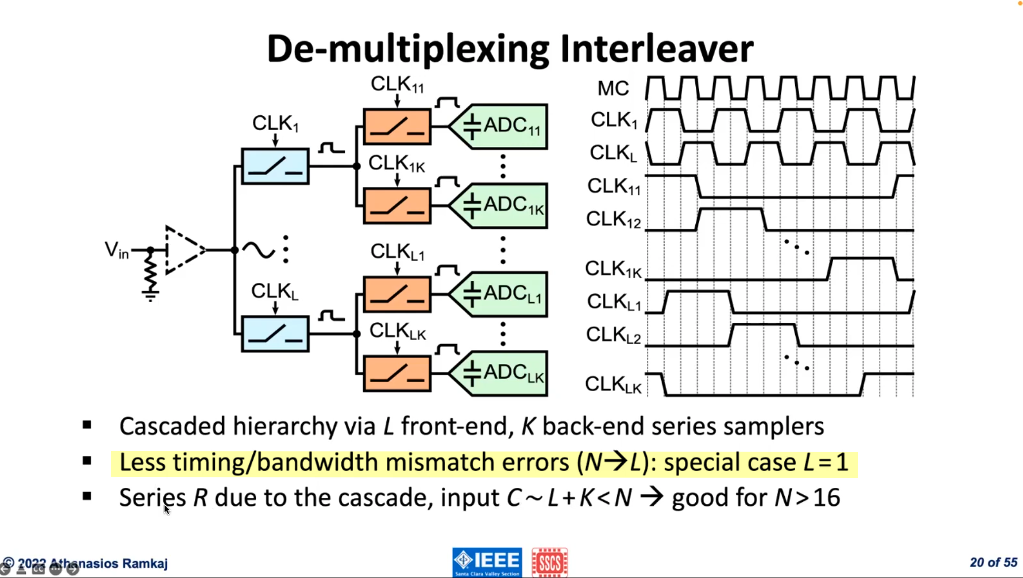
De-multiplexing Interleaver
it is the front-end samplers that determine
timing/bandwidth mismatch errors
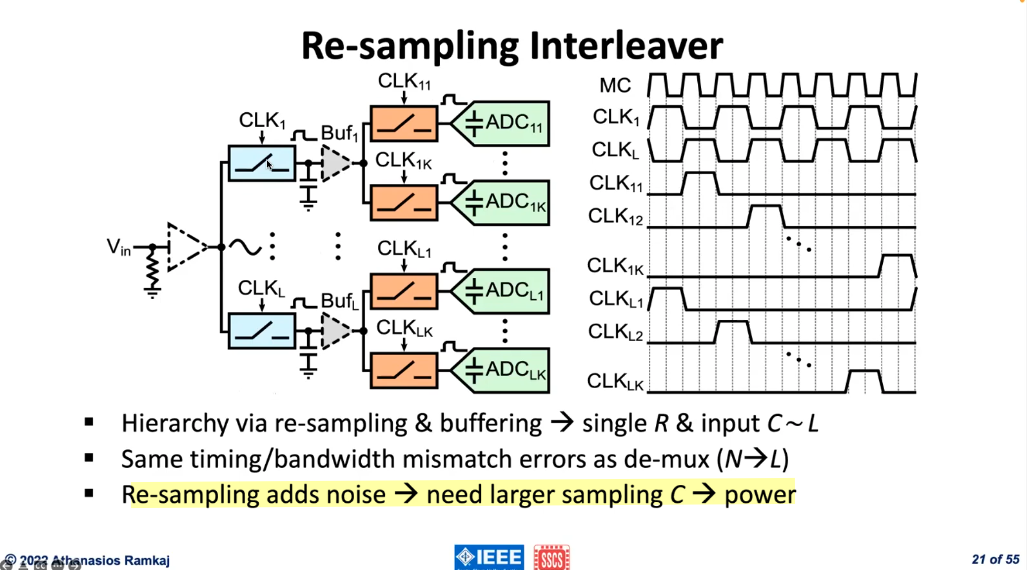
Re-sampling Interleaver
back-end re-sampling occur after the front-end, two \(\frac{KT}{C}\) contribution in total noise
(De-multiplexing Interleaver only one \(\frac{KT}{C}\))
without buffer, charging distribution reduce signal and reduce SNR,
but buffers give excess noise
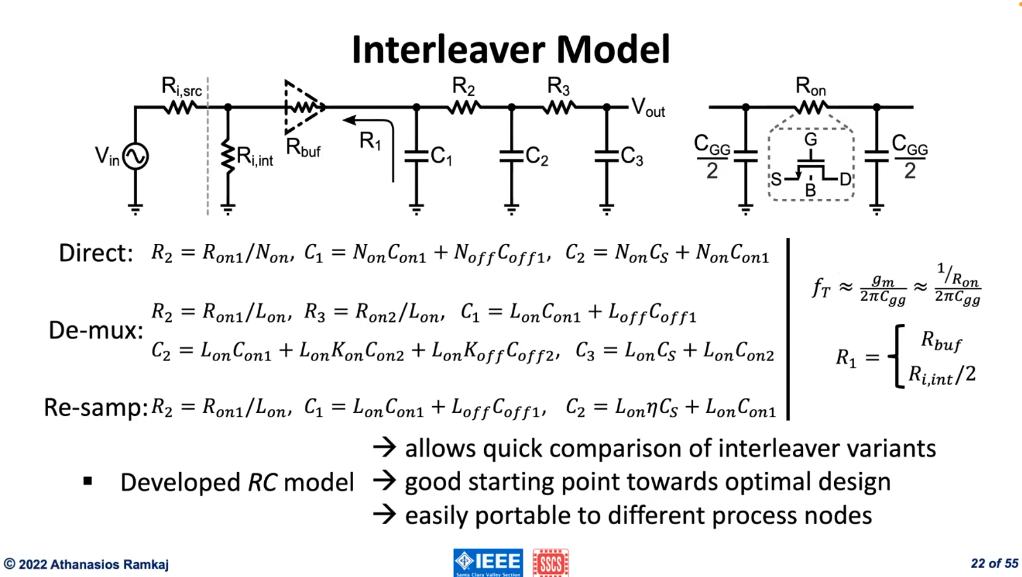
Interleaver Model
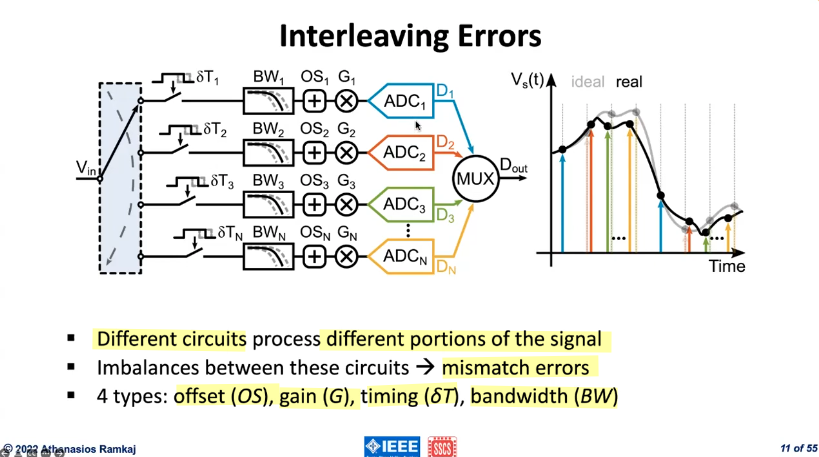
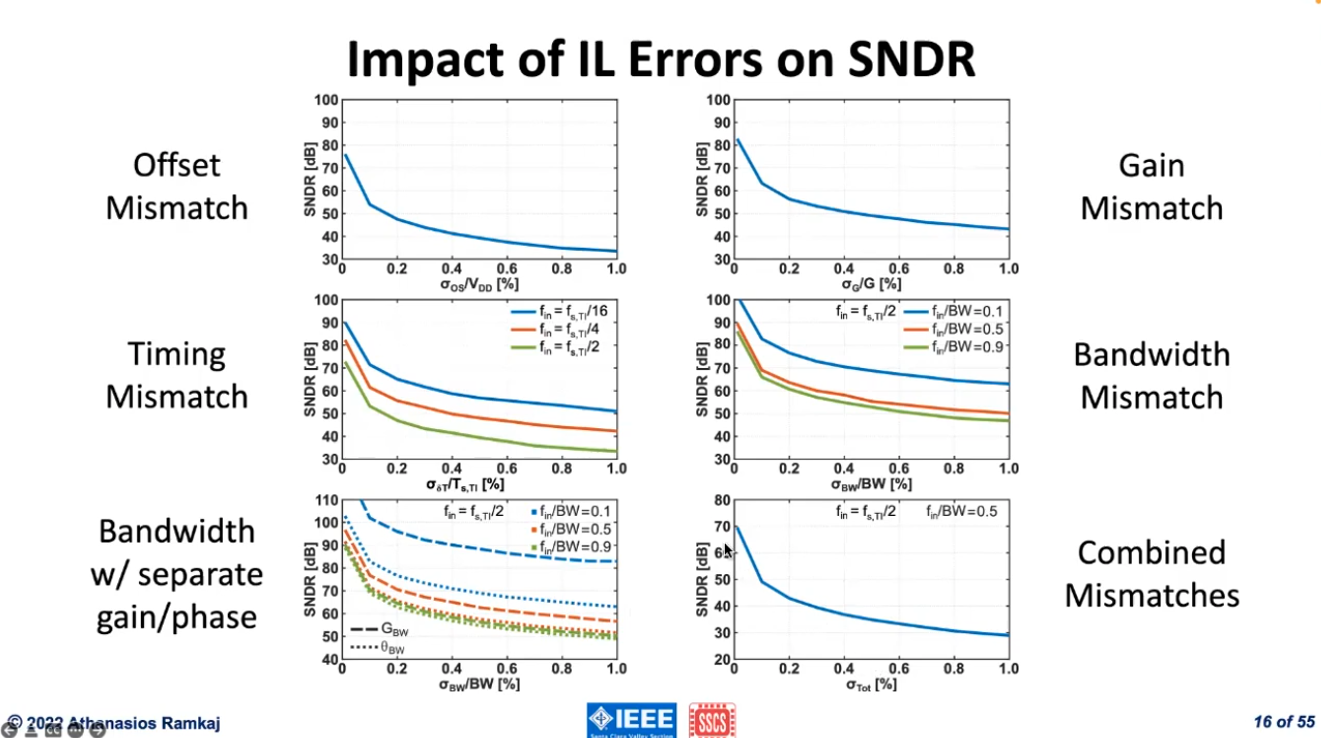
Interleaving Errors
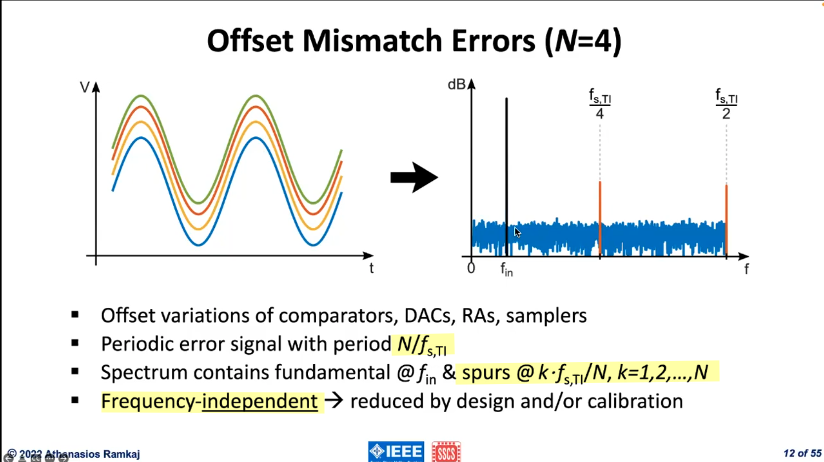
Offset Mismatch Error
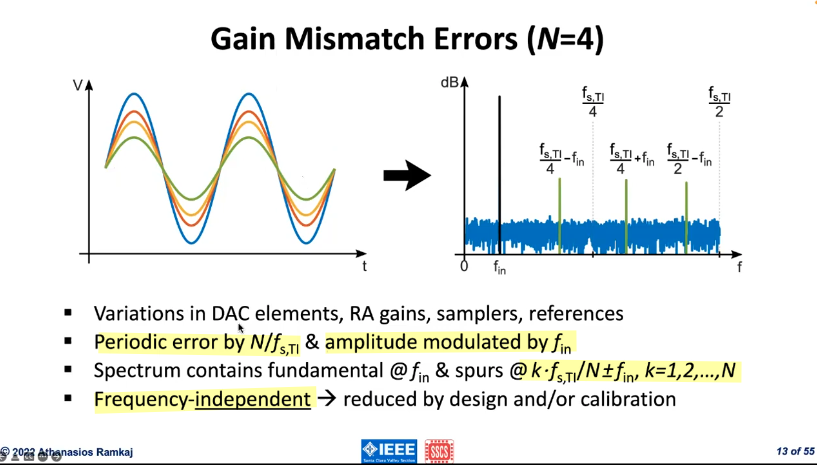
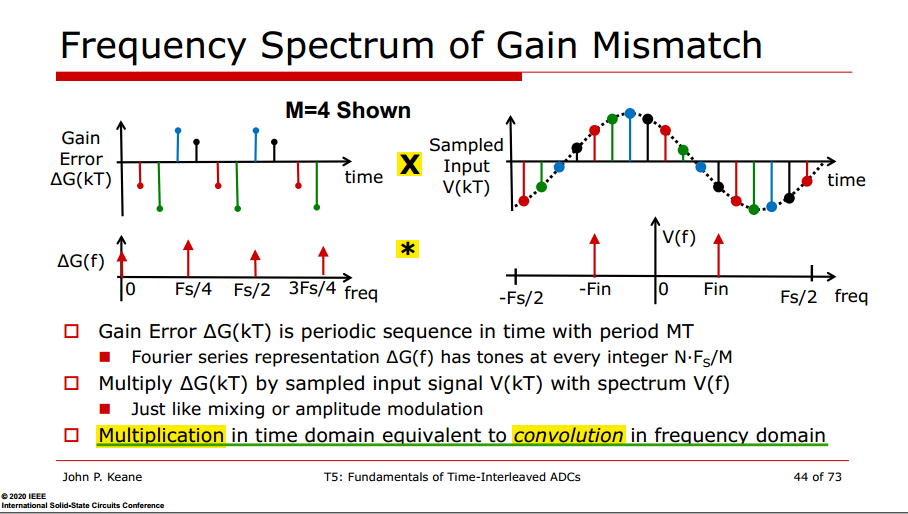
Gain Mismatch Error
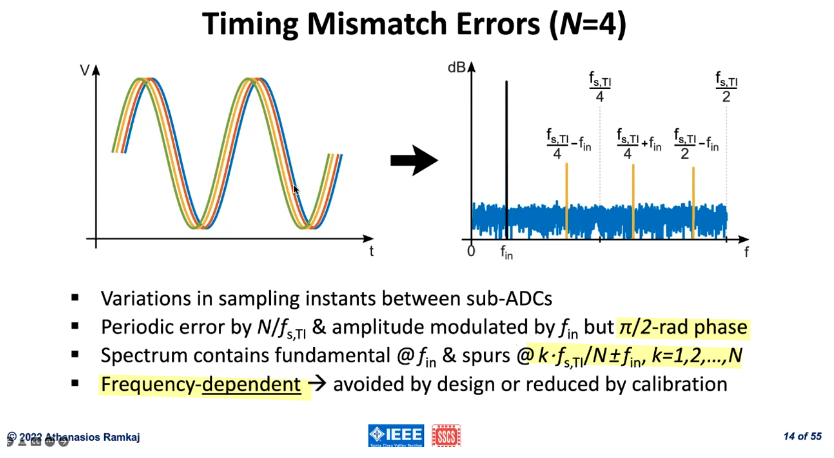
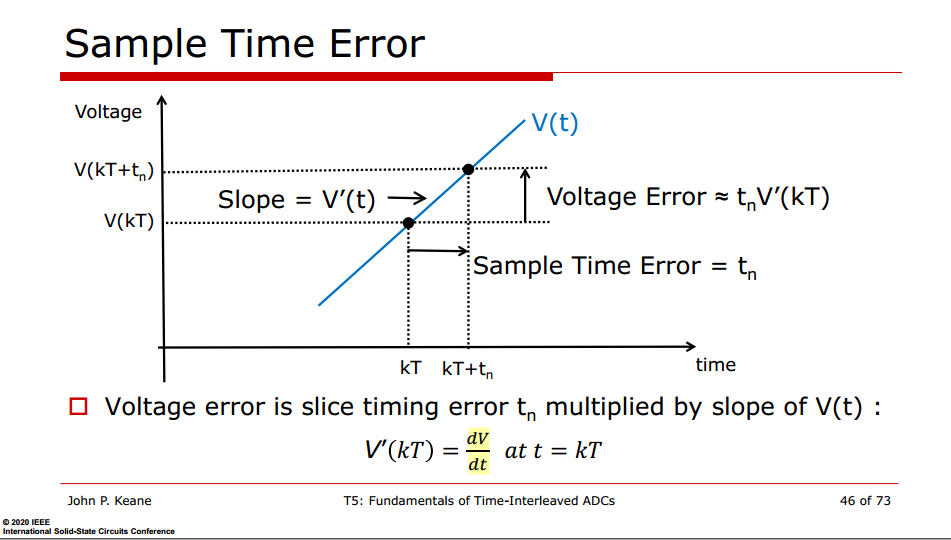
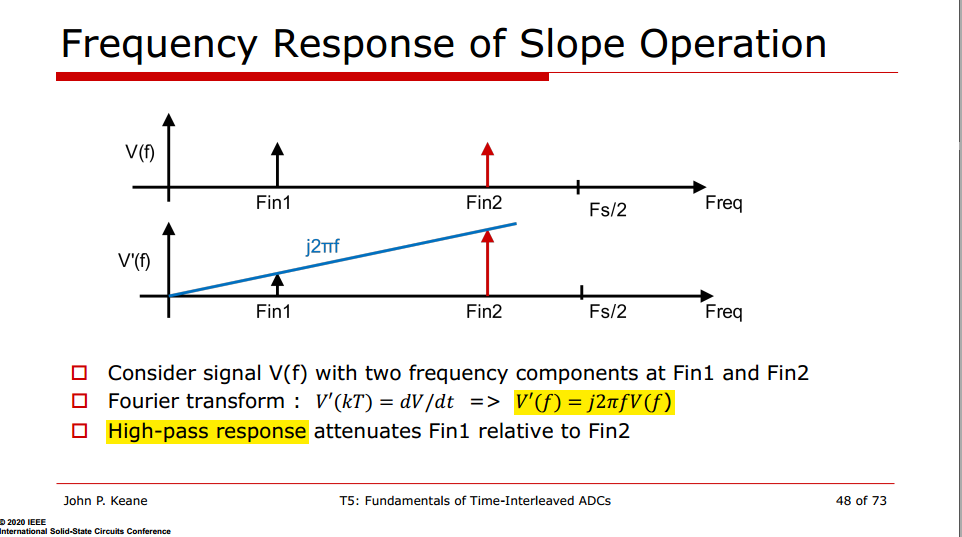
Timing Mismatch Error
\(\pi/2\)-rad phase: the maximum
error occurs at the zero crossing and not on
the peaks (Gain Mismatch error)
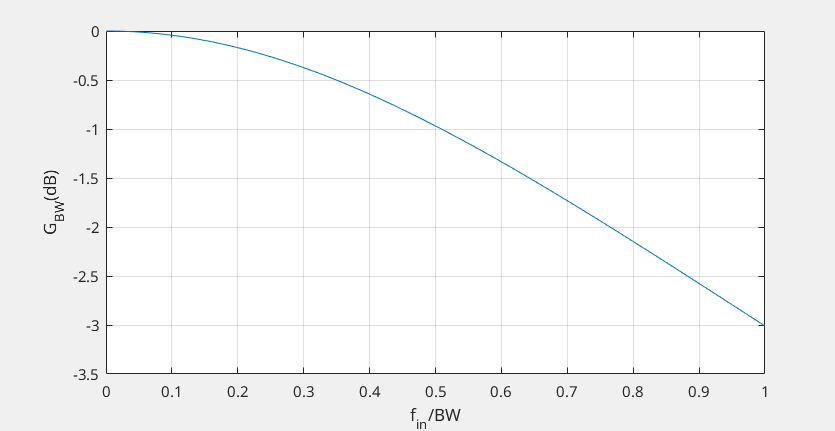
Frequency-dependent: the higher frequency input signal \(f_\text{in}\), the larger error
becomes
In time domain \[
\frac{\mathrm{d}\sin(\omega t)}{\mathrm{d}t} = \omega \cos(\omega t)
\propto \omega
\]
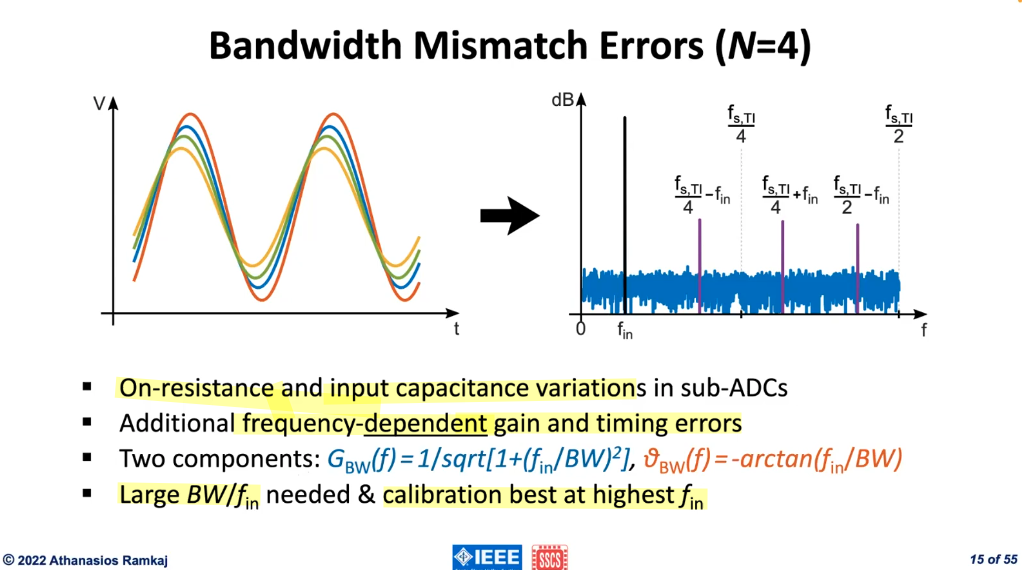
Bandwidth Mismatch Errors
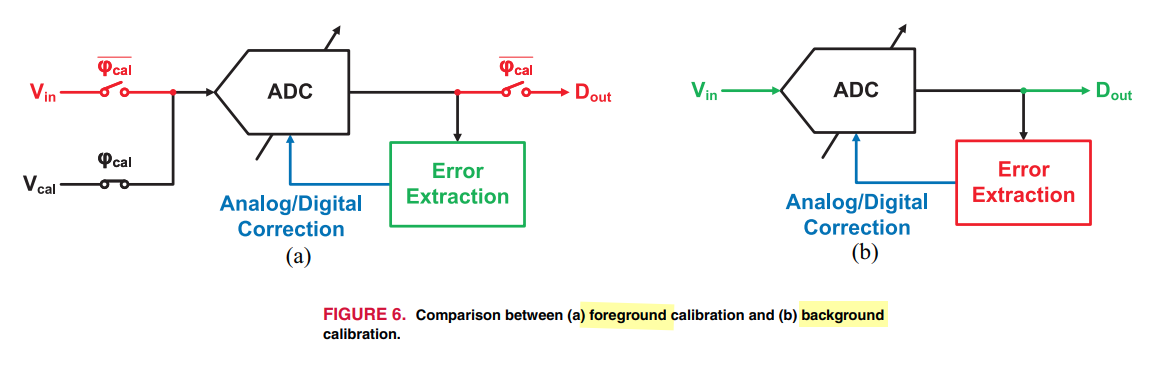
Calibration Techniques
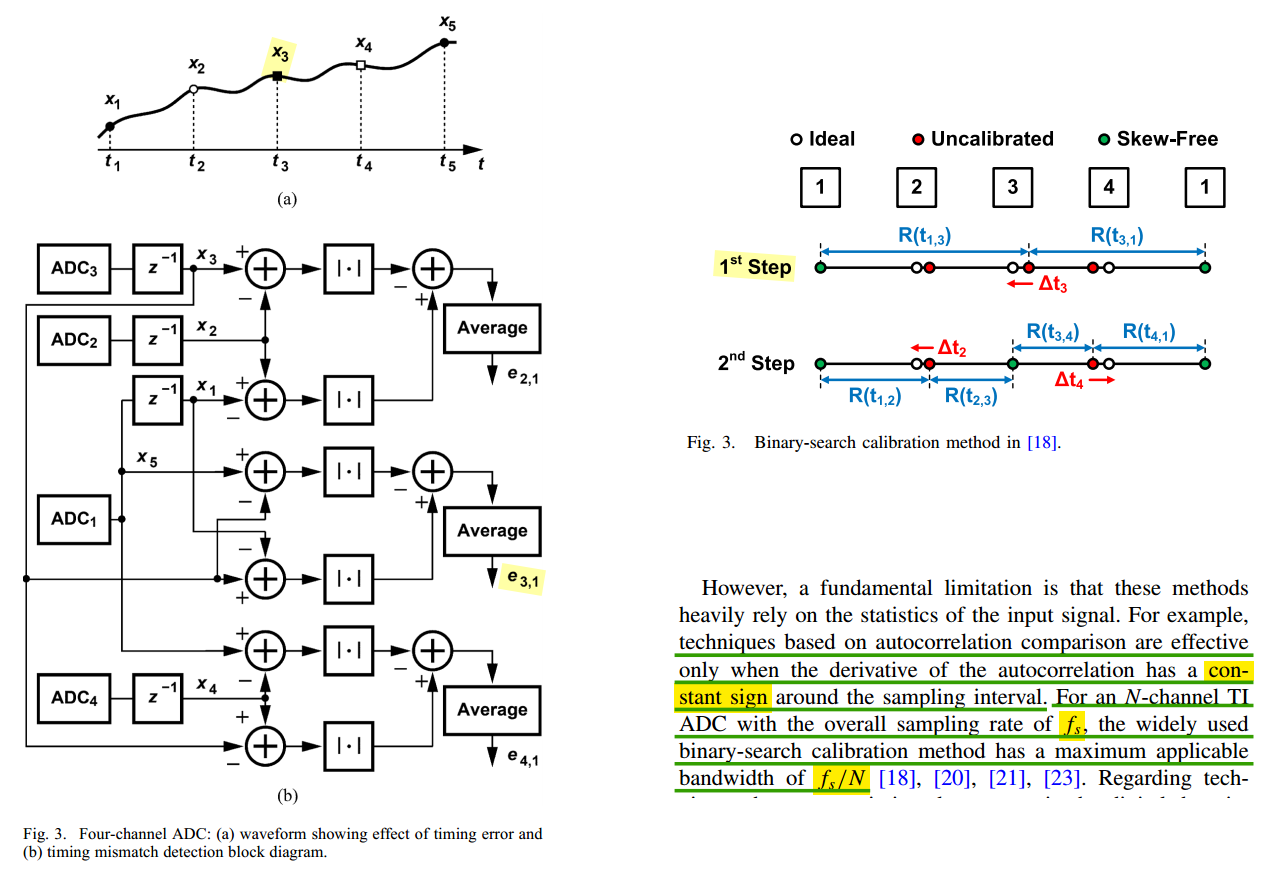
Autocorrelation-based
Skew Calibration
S. Chen, L. Wang, H. Zhang, R. Murugesu, D. Dunwell, A. Chan
Carusone, “All-Digital Calibration of Timing Mismatch Error in
Time-Interleaved Analog-to-Digital Converters,” IEEE Transactions on
VLSI Systems, Sept. 2017. [PDF, slides]
B. Razavi, "Problem of timing mismatch in interleaved ADCs,"
Proceedings of the IEEE 2012 Custom Integrated Circuits
Conference, San Jose, CA, USA, 2012 [pdf]
H. Wei, P. Zhang, B. Datta Sahoo and B. Razavi, "An 8-Bit 4-GS/s
120-mW CMOS ADC," Proceedings of the IEEE 2013 Custom Integrated
Circuits Conference, San Jose, CA, USA, 2013 [pdf]
—, "An 8 Bit 4 GS/s 120 mW CMOS ADC," in IEEE Journal of
Solid-State Circuits, vol. 49, no. 8, pp. 1751-1761, Aug. 2014 [pdf]
Binary-Search Calibration Method & its
limitations
M. Gu, Y. Tao, X. He, Y. Zhong, L. Jie and N. Sun, "A 1-GS/s 11-b
Time-Interleaved SAR ADC With Robust, Fast, and Accurate
Autocorrelation-Based Background Timing-Skew Calibration," in IEEE
Journal of Solid-State Circuits, vol. 60, no. 2, pp. 421-431, Feb.
2025
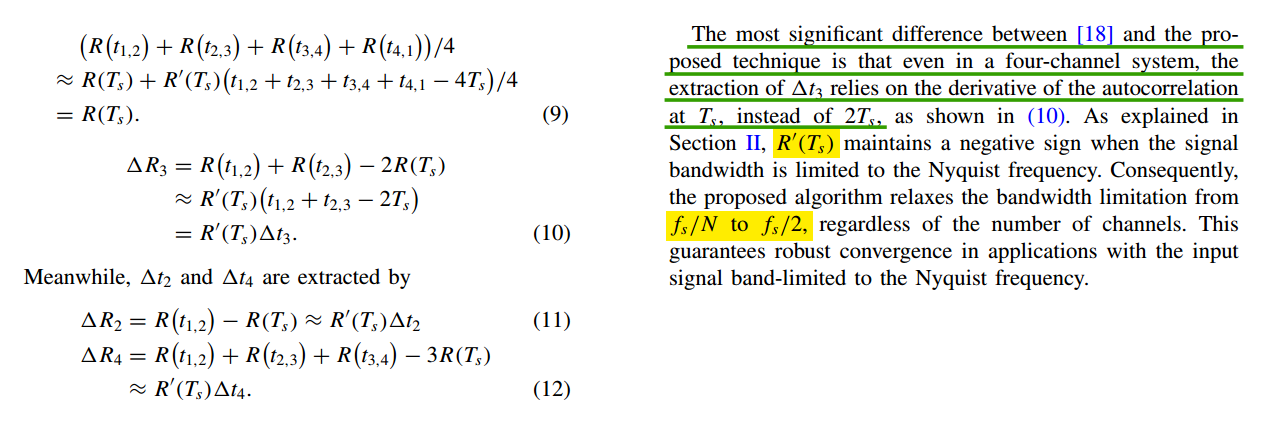
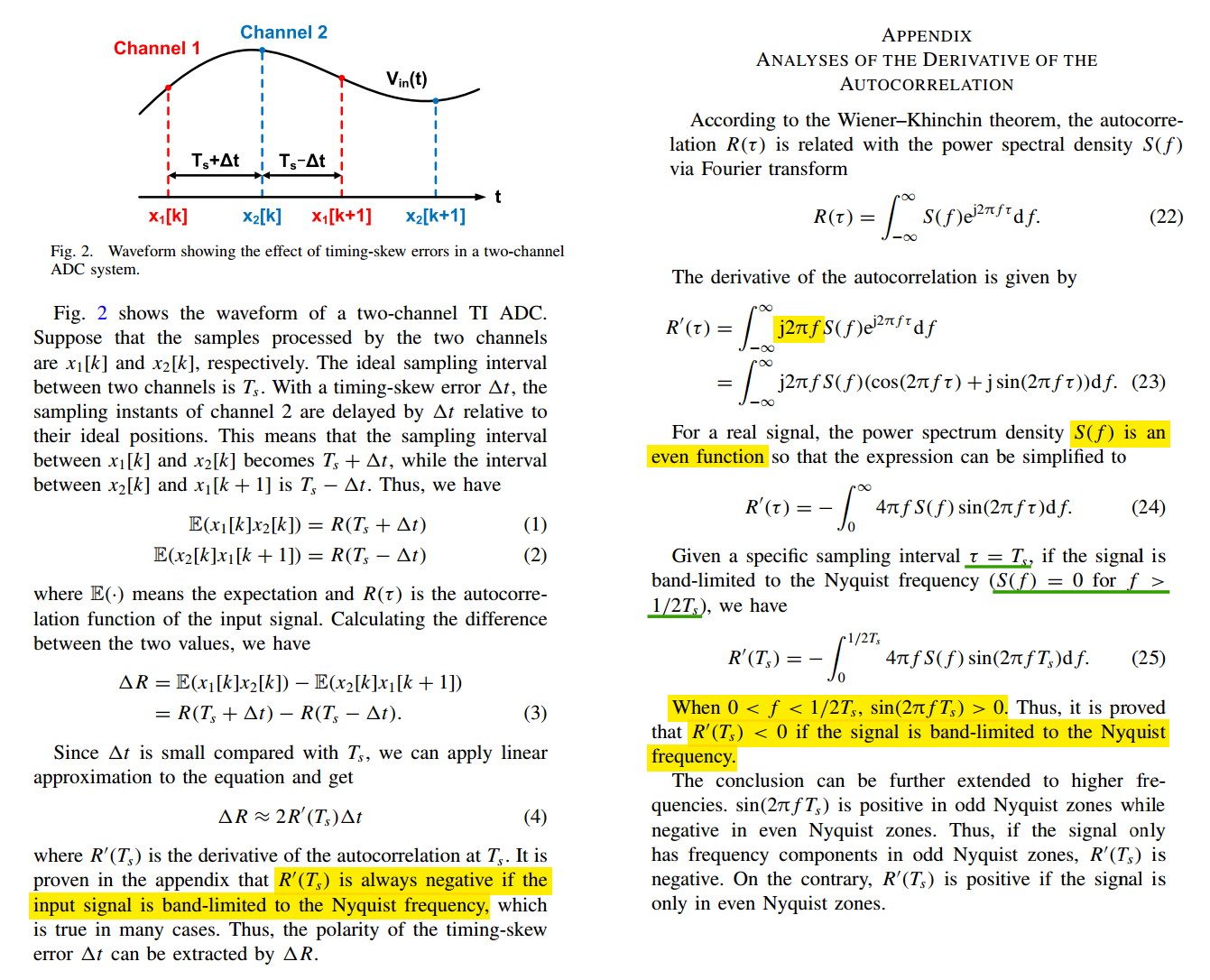
An autocorrelation-based background timing-skew calibration method,
which uses the correlations between adjacent channels to extract
timing-skew errors, which relaxes the input bandwidth limitation up to
the Nyquist frequency
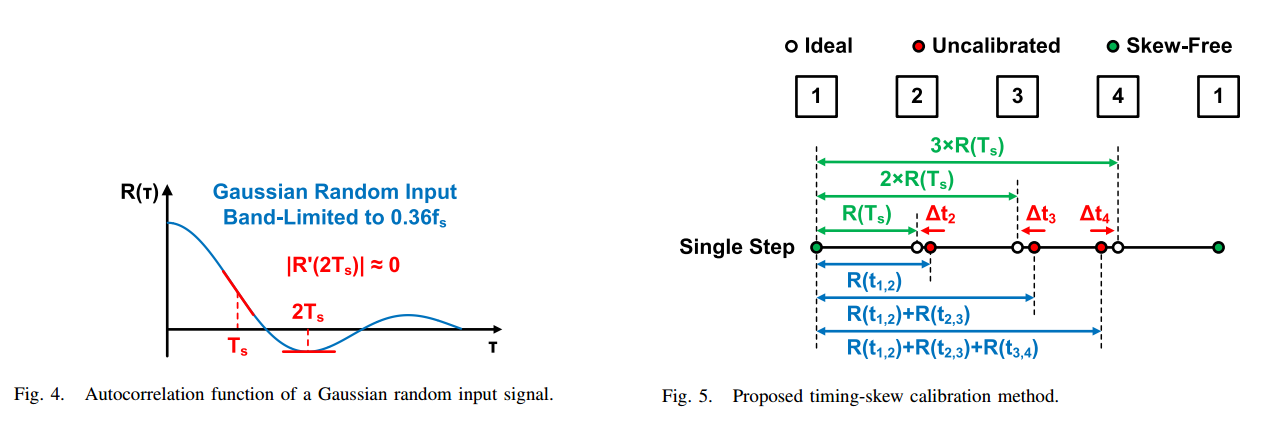
Analyses Of The Derivative of The
Autocorrelation
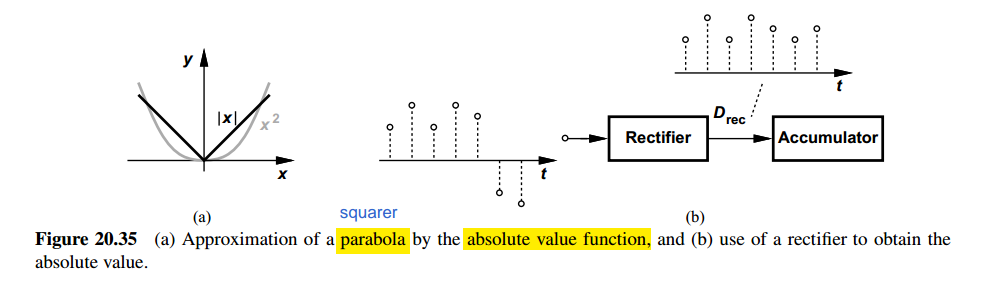
approximate the absolute value operation by
a squaring function
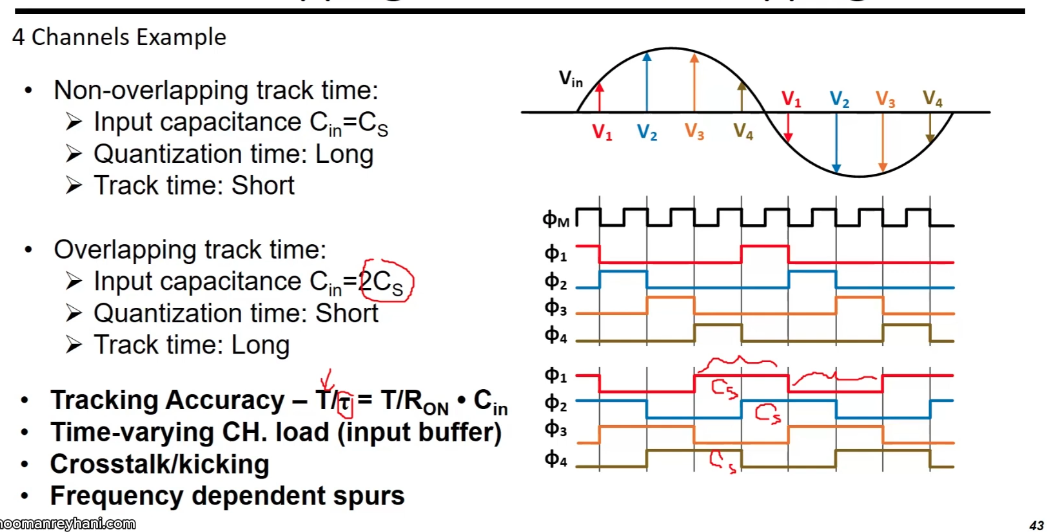
Overlapping
versus Non-overlapping track time
tracking accuracy stay same, Cin (2Cs) counteract the longer
tracking
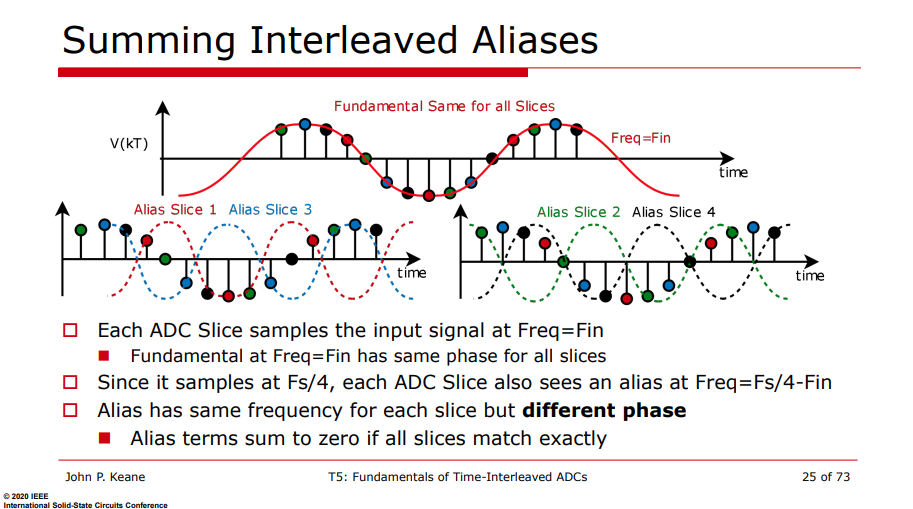
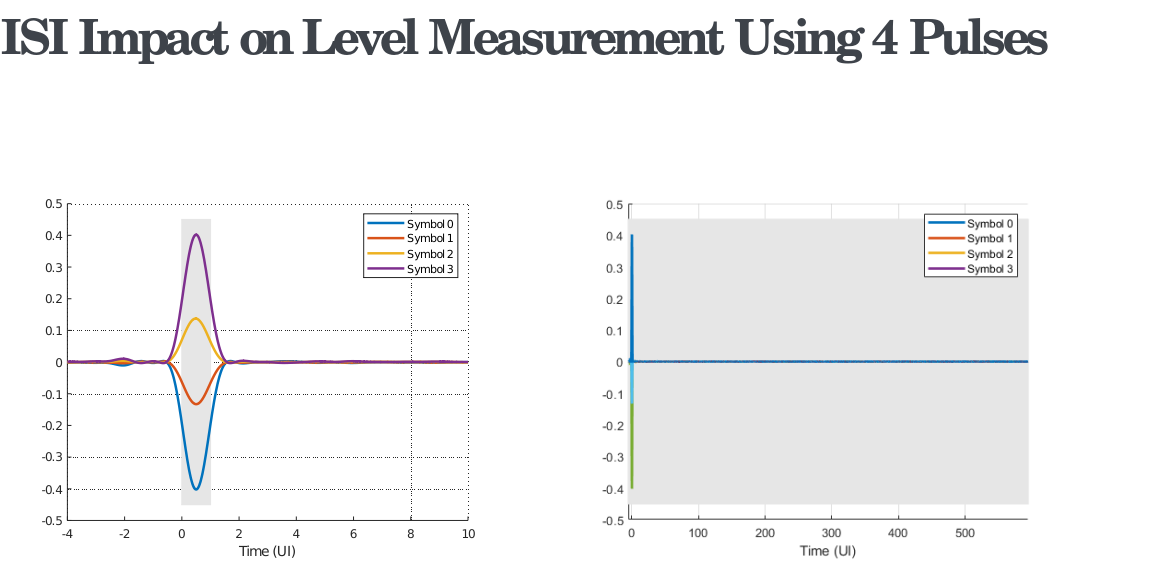
Summing Interleaved Alias
The sampling function - impulse train is \[
s(t) = \sum_{n=-\infty}^{\infty}\left[ \delta(t-n4T_s) +
\delta(t-n4T_s-T_s) + \delta(t-n4T_s-2T_s) + \delta(t-n4T_s-3T_s)\right]
\]
Y. Shifman, Y. Krupnik, U. Virobnik, A. Khairi, Y. Sanhedrai and A.
Cohen, "A 1.64mW Differential Super Source-Follower Buffer with 9.7GHz
BW and 43dB PSRR for Time-Interleaved ADC Applications in 10nm,"
2019 IEEE Asian Solid-State Circuits Conference (A-SSCC),
Macau, Macao, 2019 [pdf]
E. -H. Chen et al., "7.1 A 212.5Gb/s DSP-Based PAM-4
Transceiver with 50dB Loss Compensation for Large AI System
Interconnects in 4nm FinFET," 2025 IEEE International Solid-State
Circuits Conference (ISSCC), San Francisco, CA, USA, 2025
TODO 📅
Paper from industry
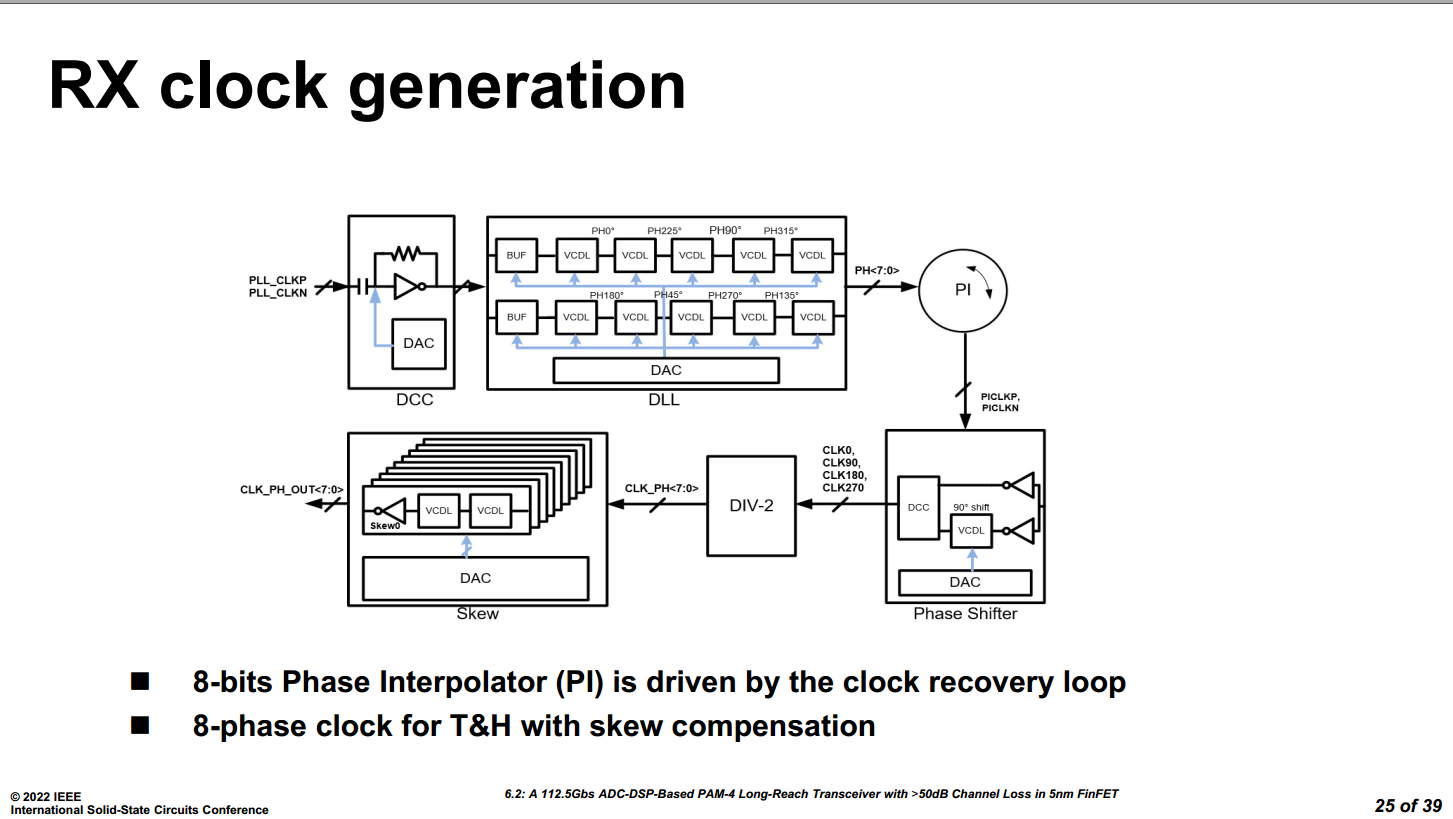
Z. Guo et al., "A 112.5Gb/s ADC-DSP-Based PAM-4 Long-Reach
Transceiver with >50dB Channel Loss in 5nm FinFET," 2022 IEEE
International Solid-State Circuits Conference (ISSCC), San Francisco,
CA, USA, 2022 [https://sci-hub.st/10.1109/ISSCC42614.2022.9731650]
P. Liu et al., "A 128Gb/s ADC/DAC Based PAM-4 Transceiver with
>45dB Reach in 3nm FinFET," 2025 Symposium on VLSI Technology and
Circuits (VLSI Technology and Circuits), Kyoto, Japan, 2025
M. S. Jalali, A. Sheikholeslami, M. Kibune and H. Tamura, "A
Reference-Less Single-Loop Half-Rate Binary CDR," in IEEE Journal of
Solid-State Circuits, vol. 50, no. 9, pp. 2037-2047, Sept. 2015 [https://www.eecg.utoronto.ca/~ali/papers/jssc2015-09.pdf]
Pisati, et.al., "Sub-250mW 1-to-56Gb/s Continuous-Range PAM-4 42.5dB
IL ADC/DAC- Based Transceiver in 7nm FinFET," 2019 IEEE International
Solid-State Circuits Conference (ISSCC), 2019 [https://sci-hub.se/10.1109/ISSCC.2019.8662428]
Poulton, Ken. ISSCC2009 "Time-Interleaved ADCs, Past and Future" (slides)
—. CICC2010 "GHz ADCs: From Exotic to Mainstream", tutorial session,
(slides)
—. ISSCC2015 "Interleaved ADCs Through the Ages", (slides)
Ewout Martens. ESSCIRC 2019 Tutorials: Advanced Techniques for ADCs
for 5G Massive MIMO [https://youtu.be/7hYichGGU6k]
Athanasios Ramkaj. January 26, 2022, IEEE SSCS Santa Clara Valley
Section Technical Talk: Design Considerations Towards Optimal
High-Resolution Wide-Bandwidth Time-Interleaved ADCs [https://youtu.be/k3jY9NtfYlY]
Ahmed M. A. Ali 2016, "High Speed Data Converters" [pdf]
Razavi, B. (2025). Analysis and design of data converters.
Cambridge University Press.
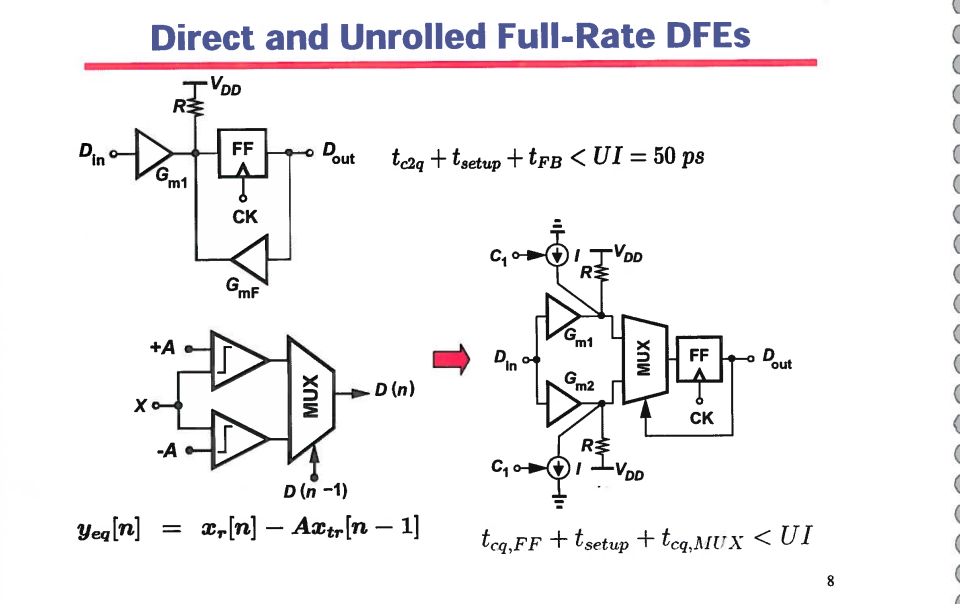
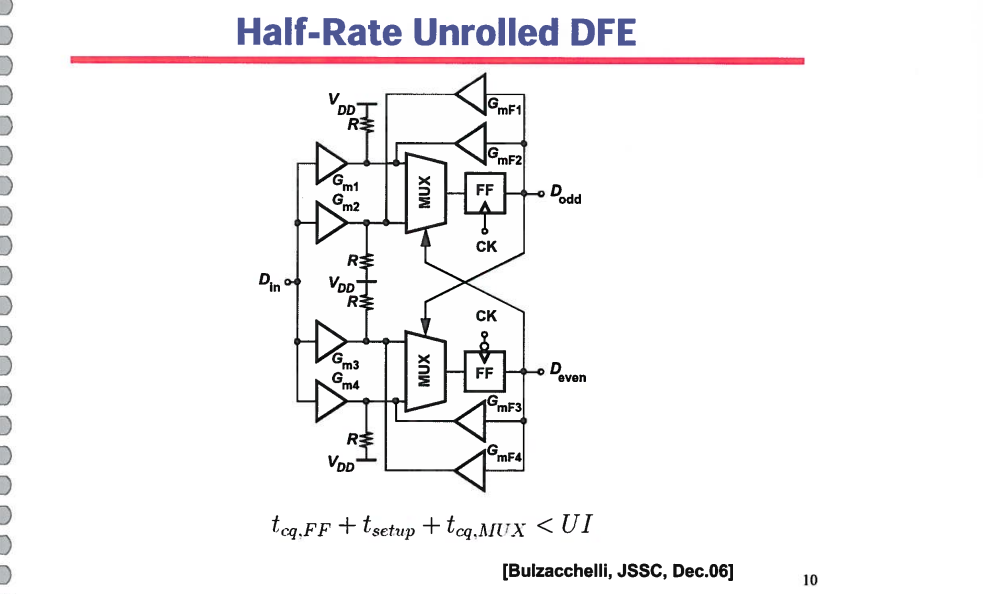
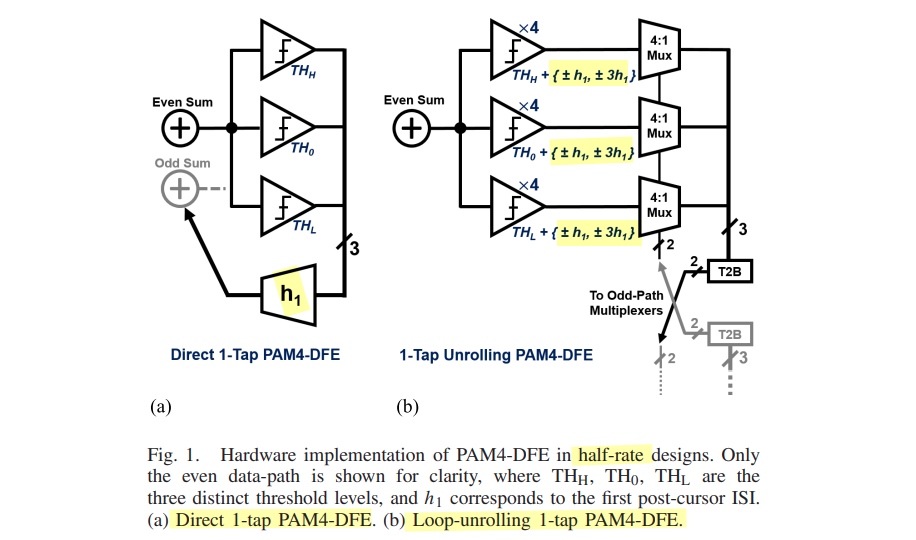
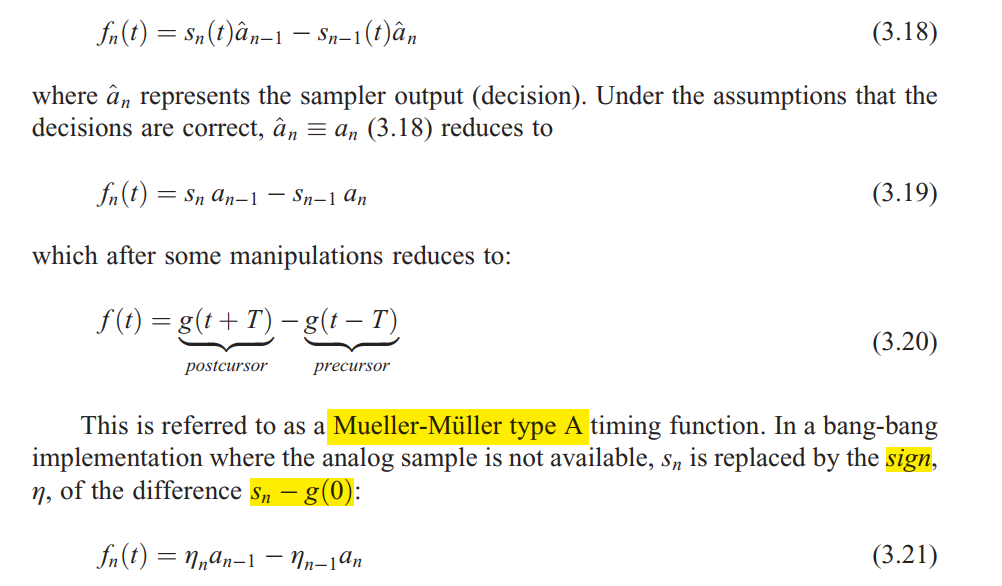
speculative DFE is also known as
loop unrolled DFE, which solve the critical
timing on first tap
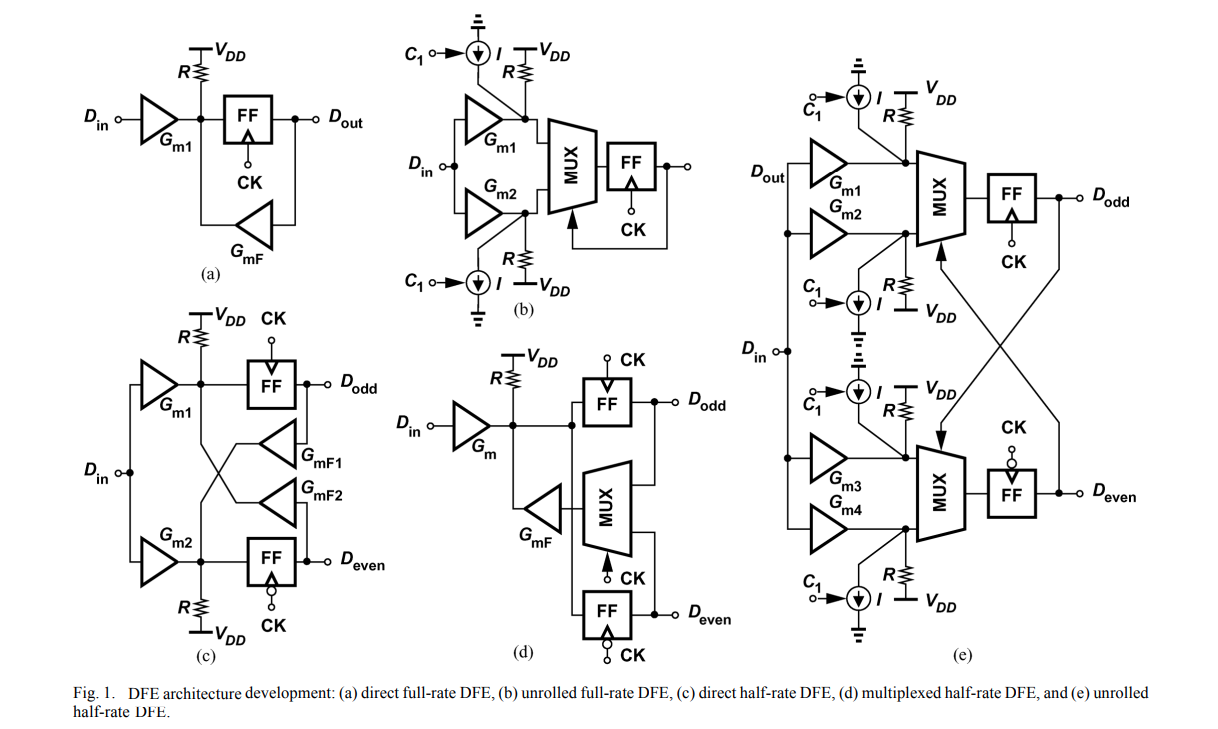
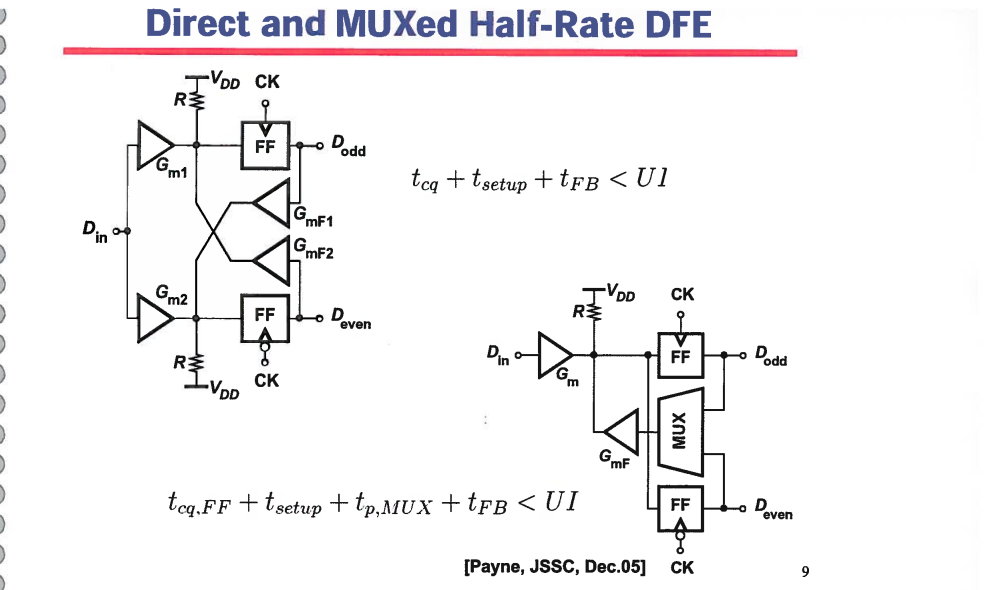
DFE architecture
Extensive work on DFEs has produced a multitude of architectures,
which can be broadly categorized as "direct"" or
"unrolled" (speculative) DFEs with
"full-rate" or "half-rate"
clocking
S. Ibrahim and B. Razavi, "Low-Power CMOS Equalizer Design for
20-Gb/s Systems," in IEEE Journal of Solid-State Circuits, vol.
46, no. 6, pp. 1321-1336, June 2011 [https://sci-hub.se/10.1109/JSSC.2011.2134450]
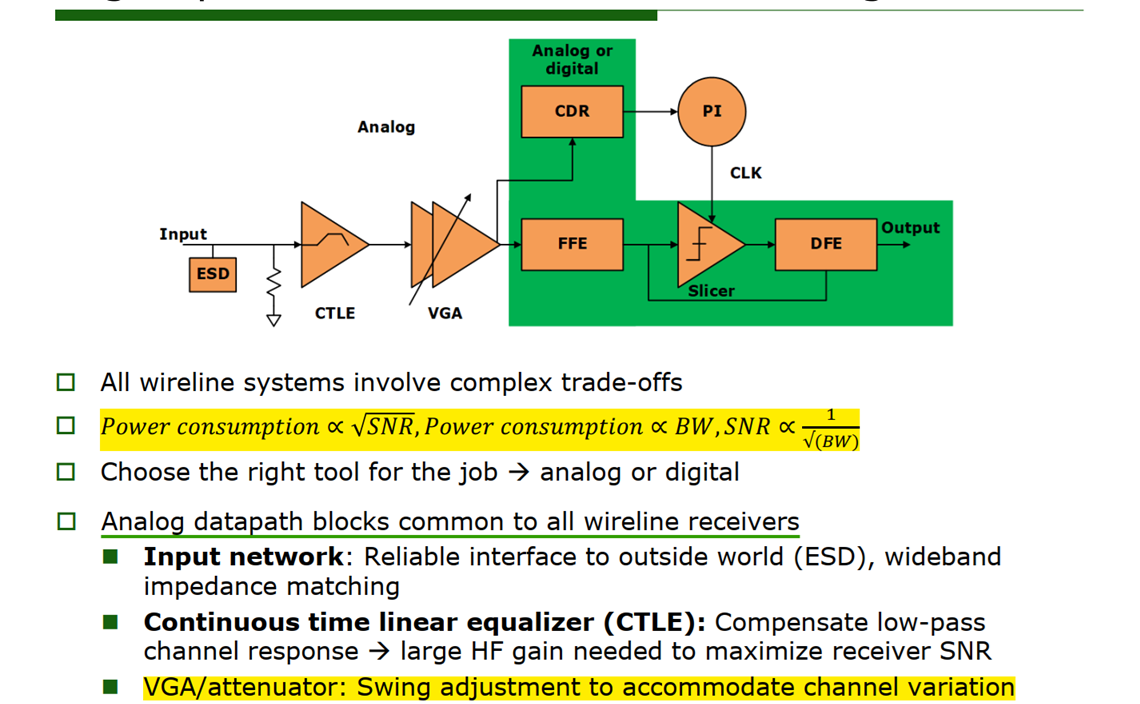
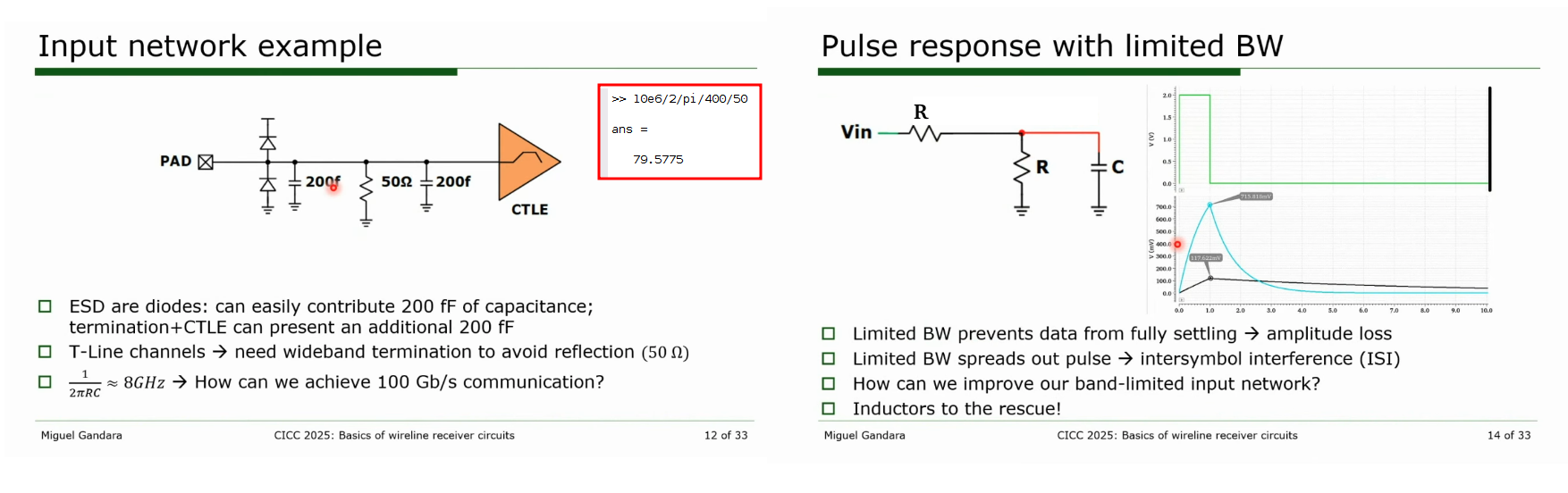
Miguel Gandara, MediaTek. CICC 2025 Circuit Insights: Basics of
Wireline Receiver Circuits [https://youtu.be/X4JTuh2Gdzg]
Tony Chan Carusone, Alphawave Semi. VLSI2025 SC2: Connectivity
Technologies to Accelerate AI
H. Park et al., "7.4 A 112Gb/s DSP-Based PAM-4 Receiver with an
LC-Resonator-Based CTLE for >52dB Loss Compensation in 4nm FinFET,"
2025 IEEE International Solid-State Circuits Conference (ISSCC), San
Francisco, CA, USA, 2025
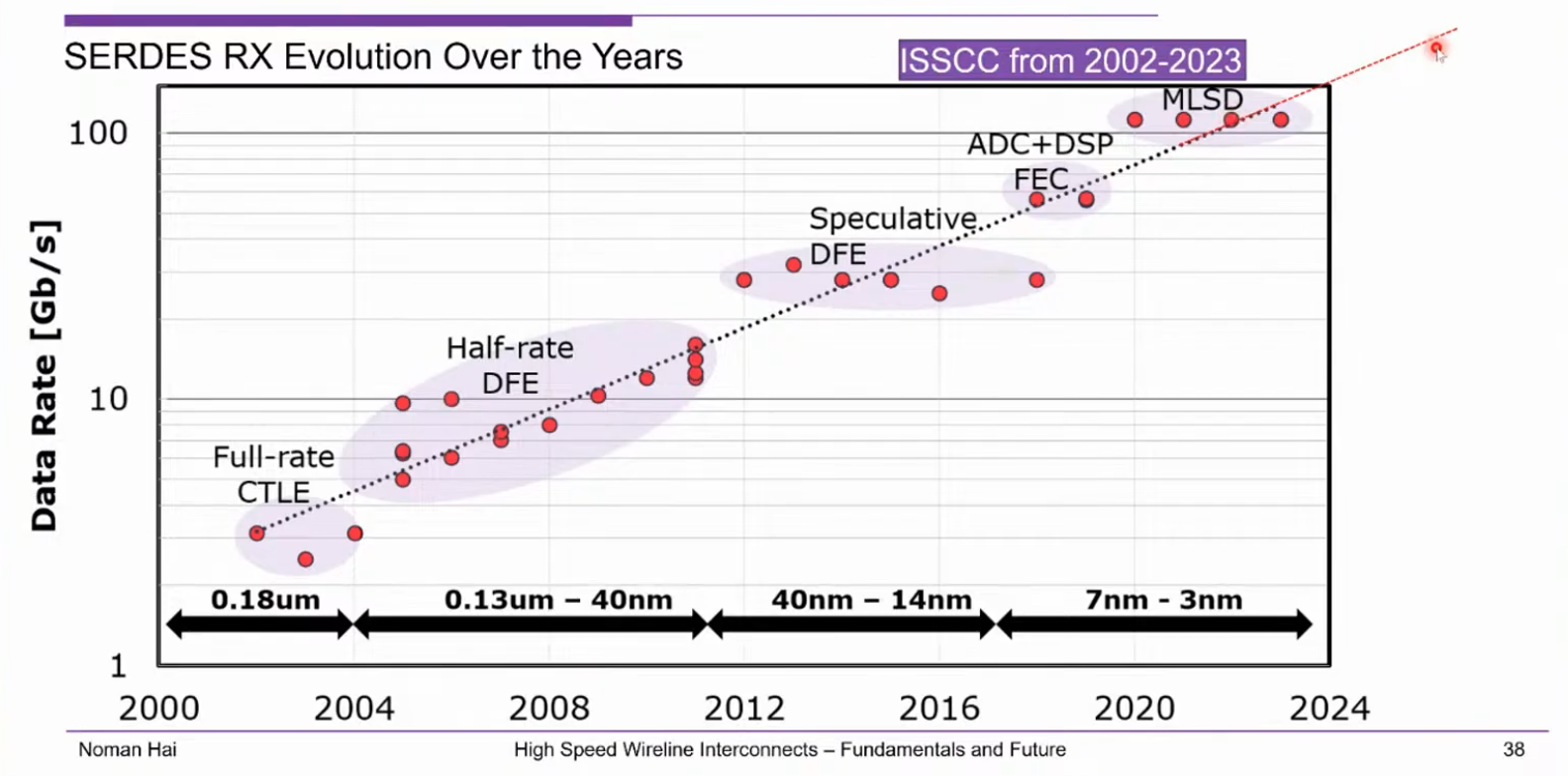
Noman Hai, Synopsys, Canada CASS Talks 2025 - May 2, 2025: High-speed
Wireline Interconnects: Design Challenges and Innovations in 224G SerDes
[https://www.youtube.com/live/wHNOlxHFTzY]
Z. Toprak-Deniz et al., "A 128-Gb/s 1.3-pJ/b PAM-4 Transmitter With
Reconfigurable 3-Tap FFE in 14-nm CMOS," in IEEE Journal of Solid-State
Circuits, vol. 55, no. 1, pp. 19-26, Jan. 2020 [https://sci-hub.st/10.1109/JSSC.2019.2939081]
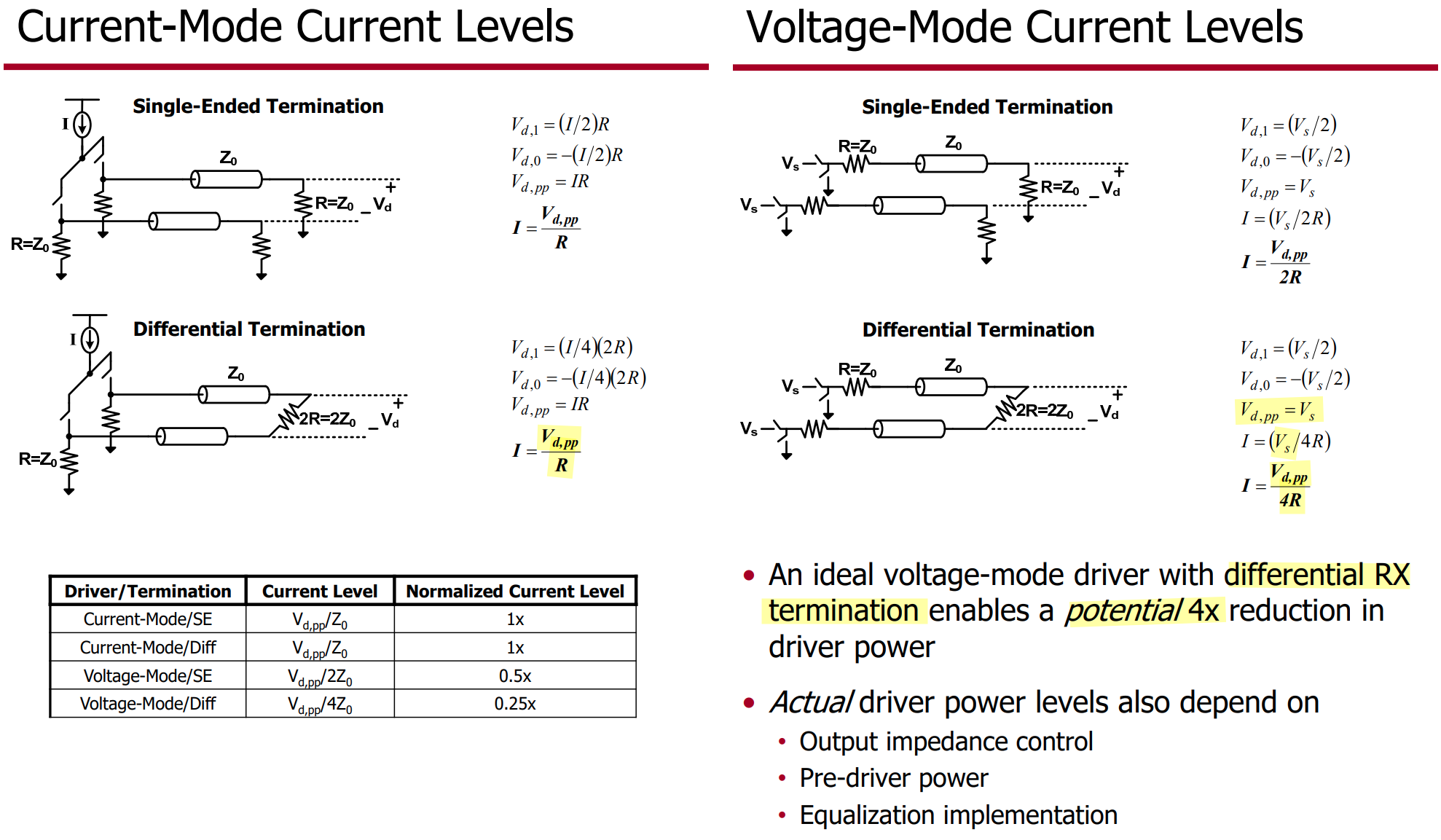
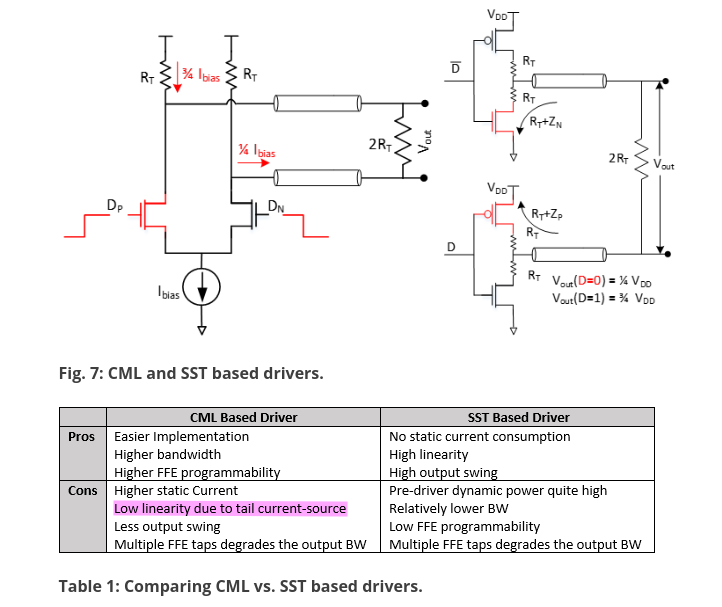
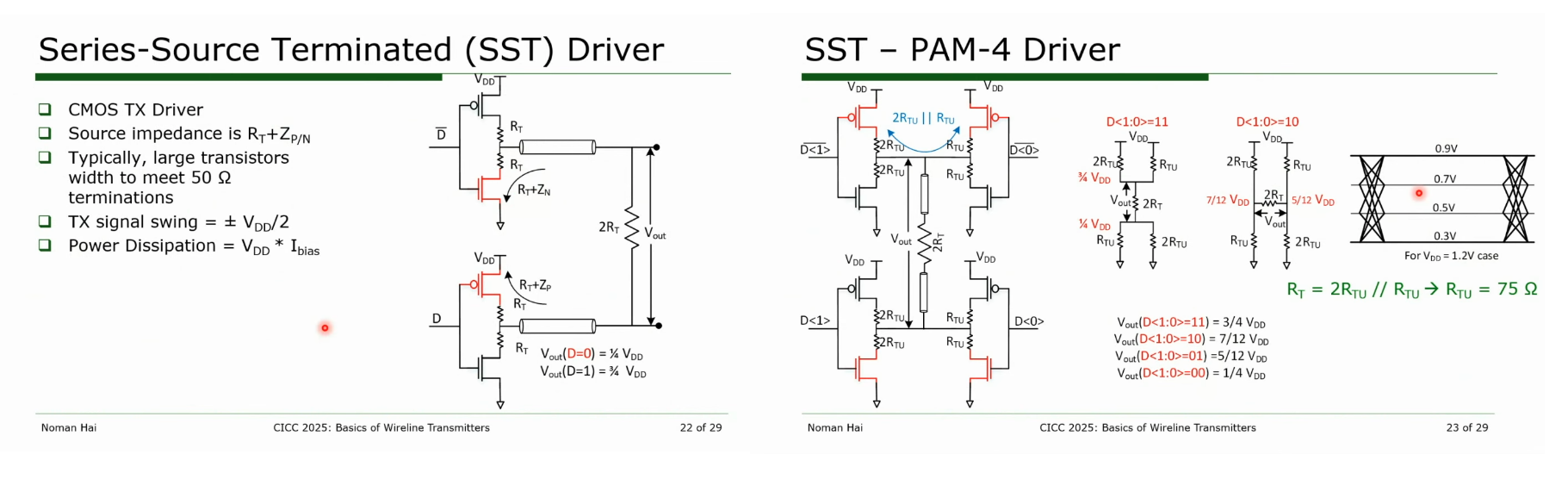
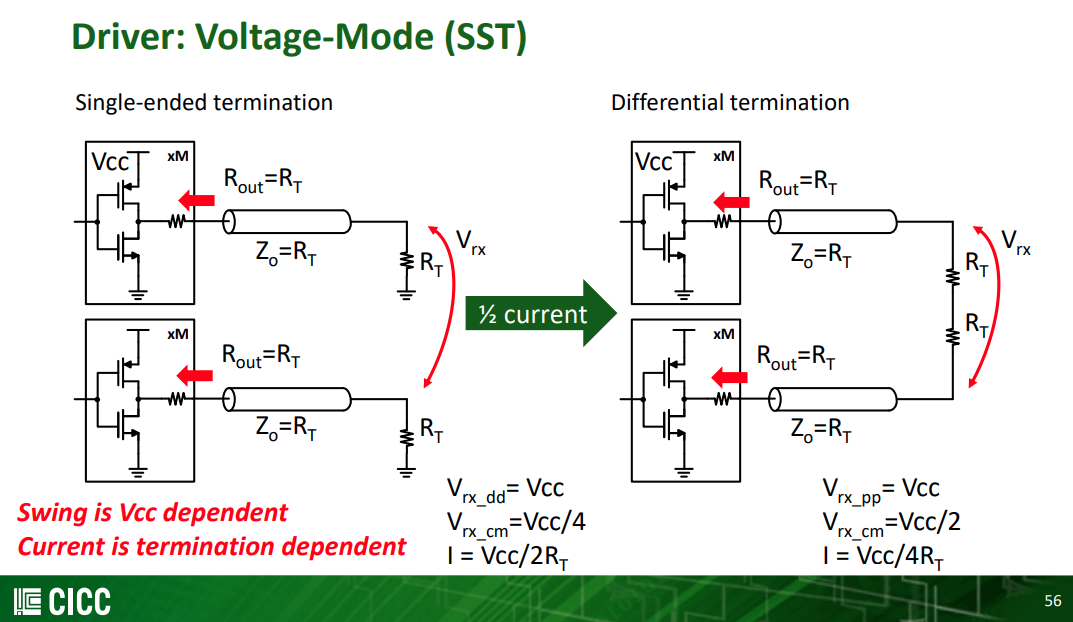
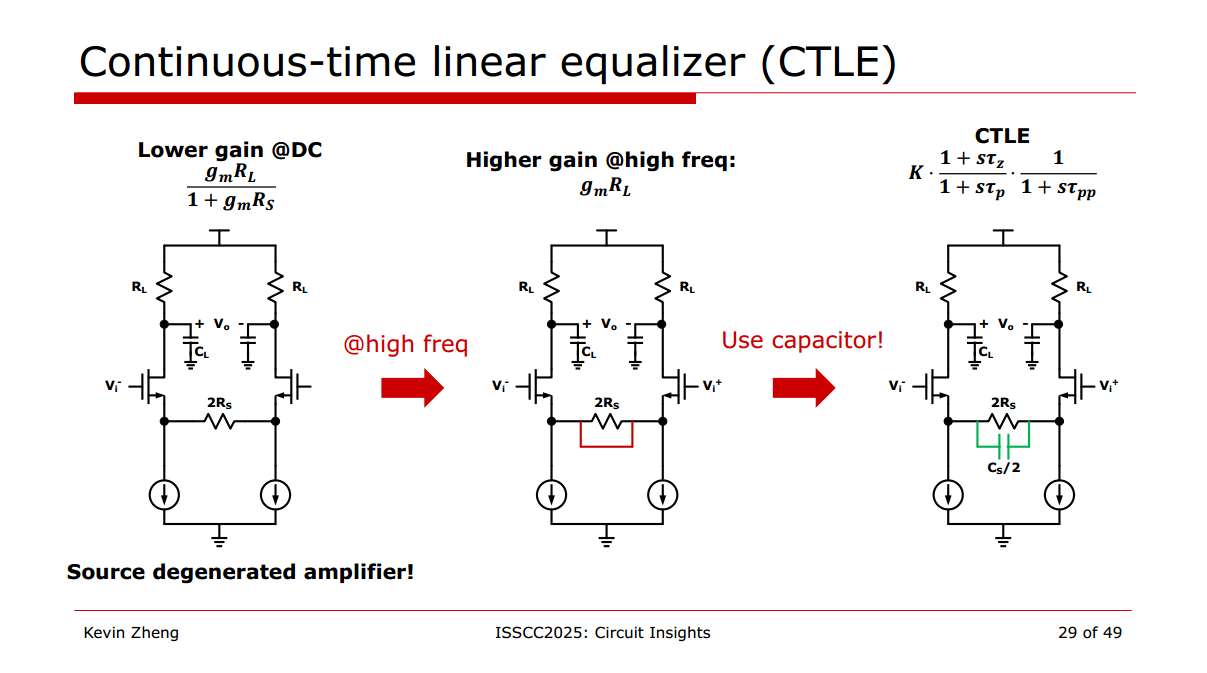
The source-series terminated (SST) drivers are more power-efficient
than their current mode logic (CML) counterparts due to their lower
termination power
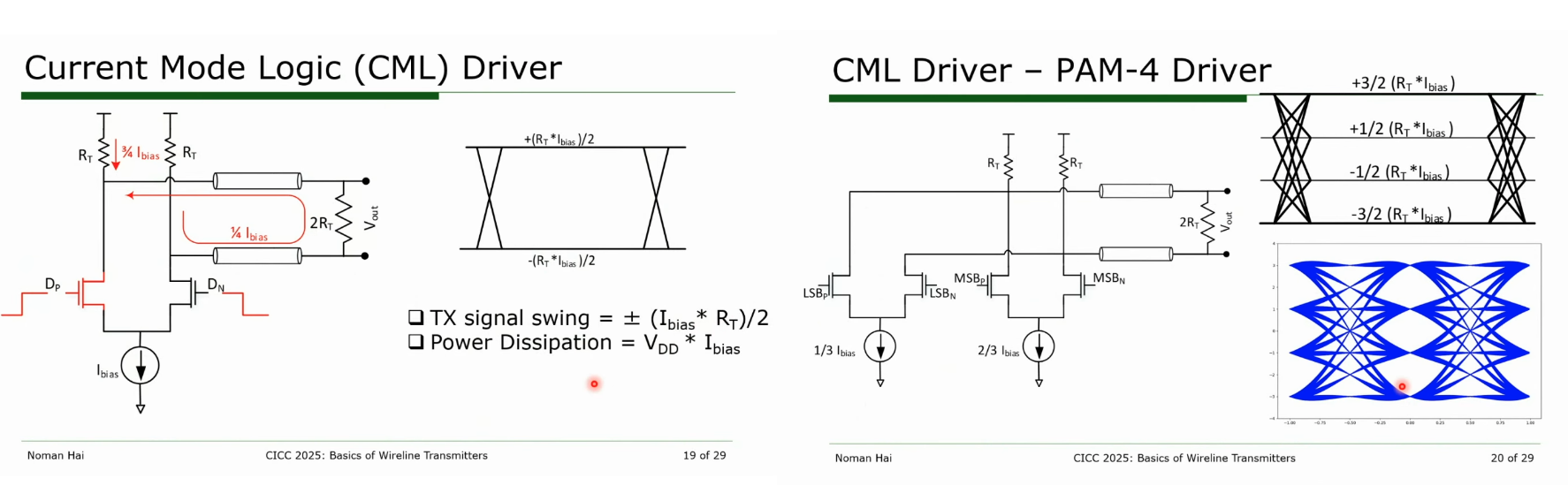
To achieve the same differential output amplitude, CML topologies
consume \(4\) times the current of SST
topologies
Serialization
Z. Toprak-Deniz et al., "A 128-Gb/s 1.3-pJ/b PAM-4 Transmitter With
Reconfigurable 3-Tap FFE in 14-nm CMOS," in IEEE Journal of Solid-State
Circuits, vol. 55, no. 1, pp. 19-26, Jan. 2020 [https://sci-hub.st/10.1109/JSSC.2019.2939081]
the resistance of MOS is not highly controlled -> \(R_T + Z_N\)
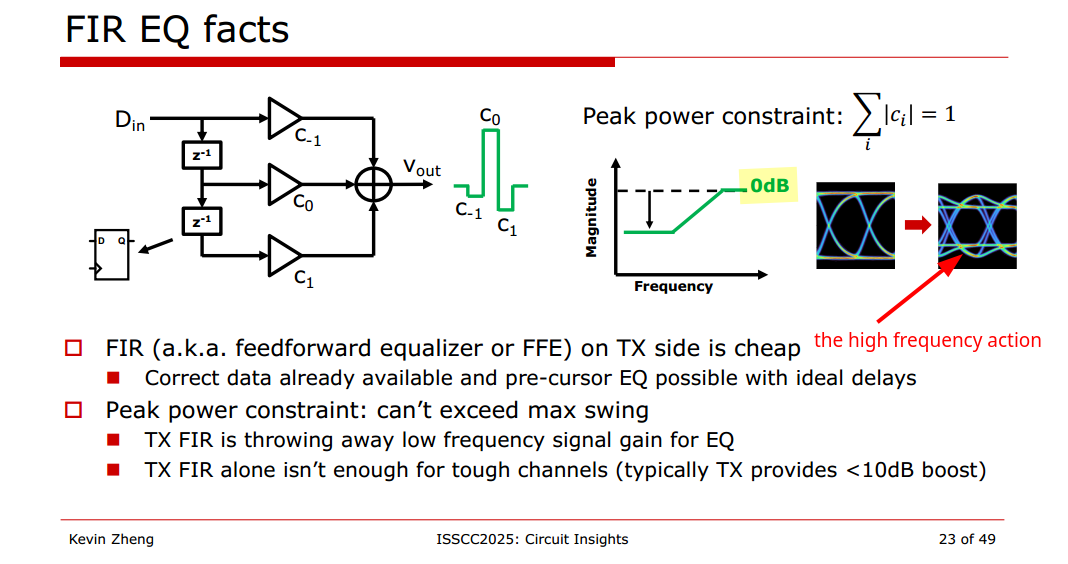
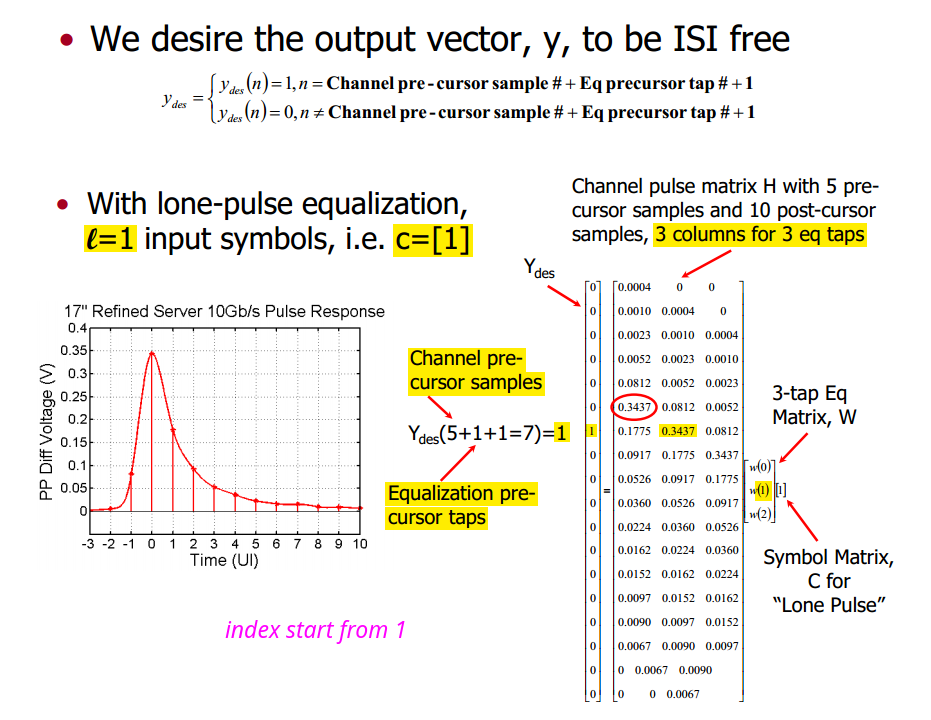
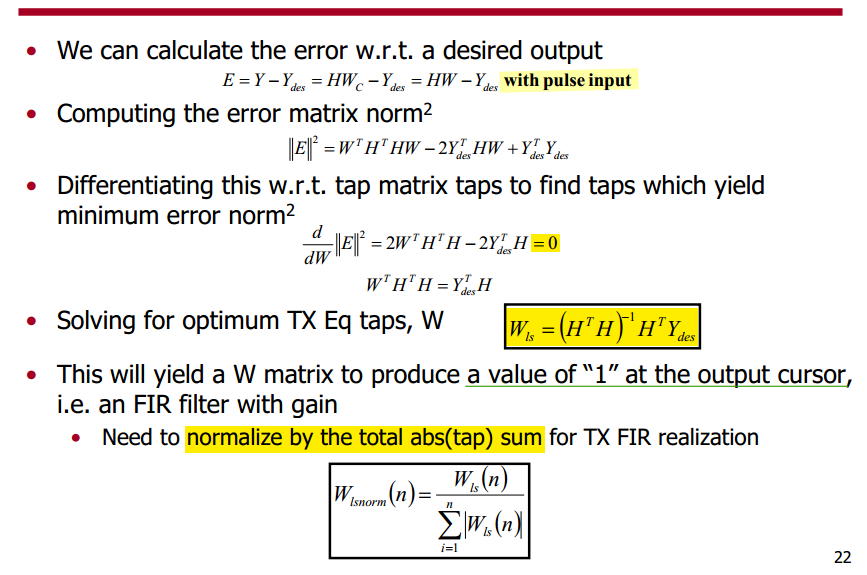
Peak power constraint of TX
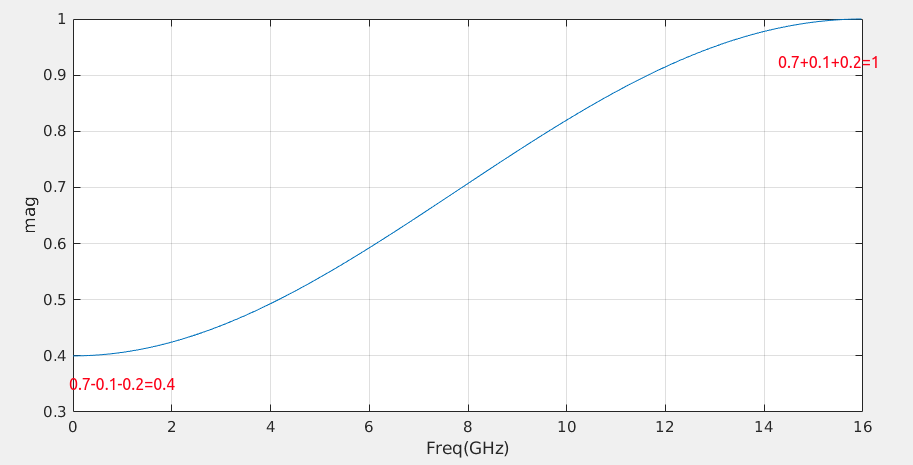
FIR
Due to circuit limitation, circuit cannot have arbitrarily large
voltage on the output, i.e. a limited maximum swing. In order
to create the high frequency shape, the best we can do is lower DC
gain (low frequency gain < 1)
FIR is not increasing the amplitude on the edges
FIR is reducing the inner eye diagram
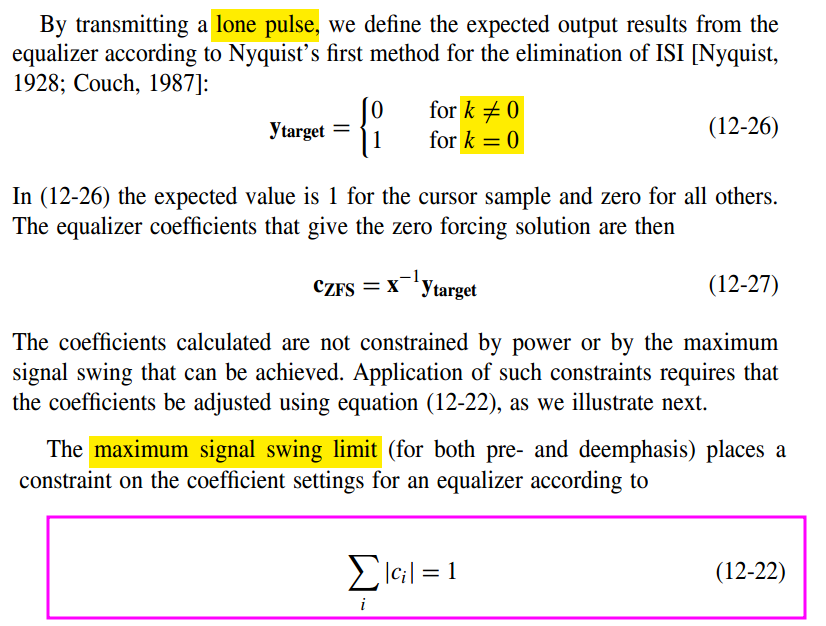
The maximum swing stays the same, \(\sum_i
|c_i|=1\)
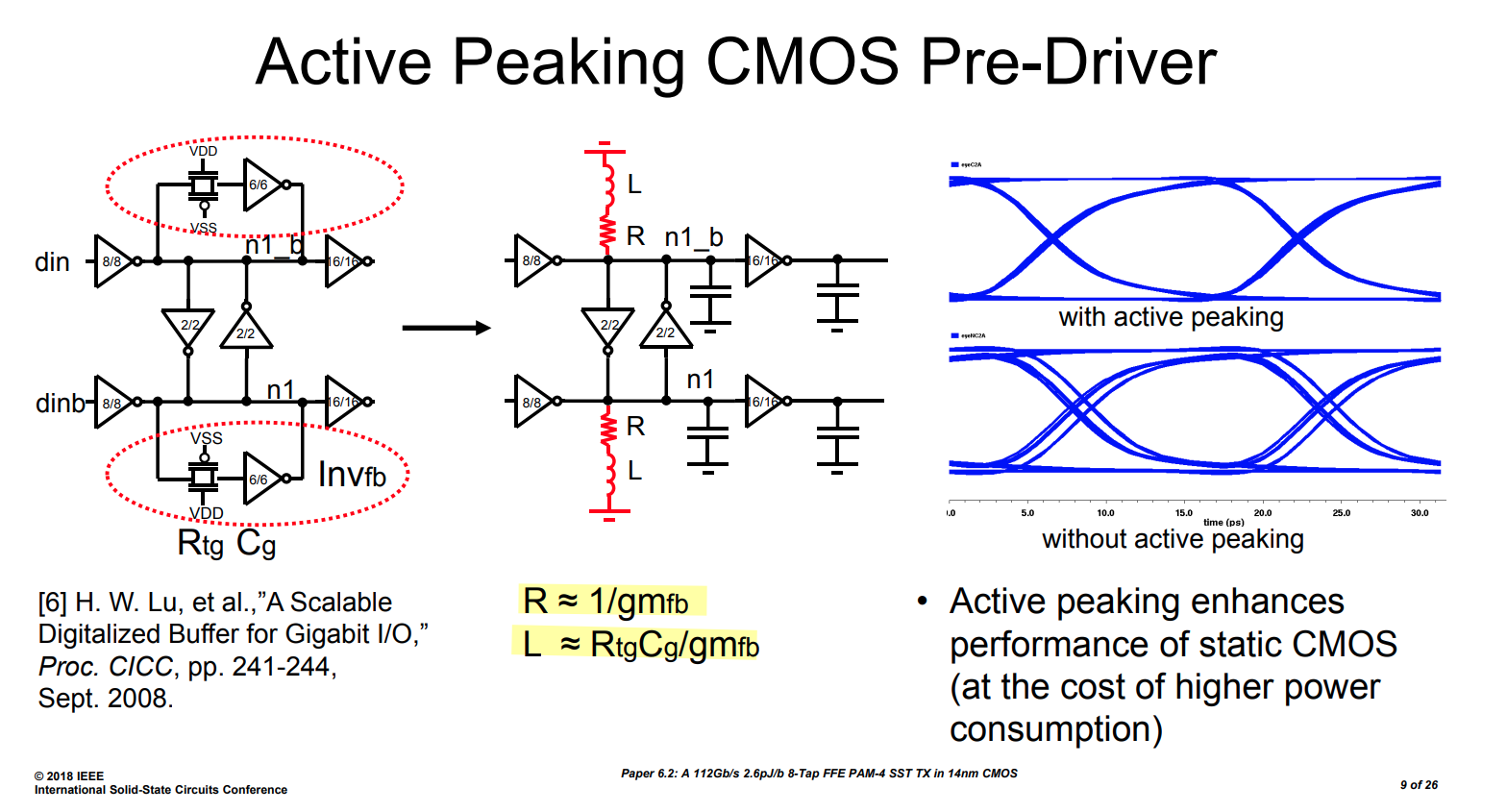
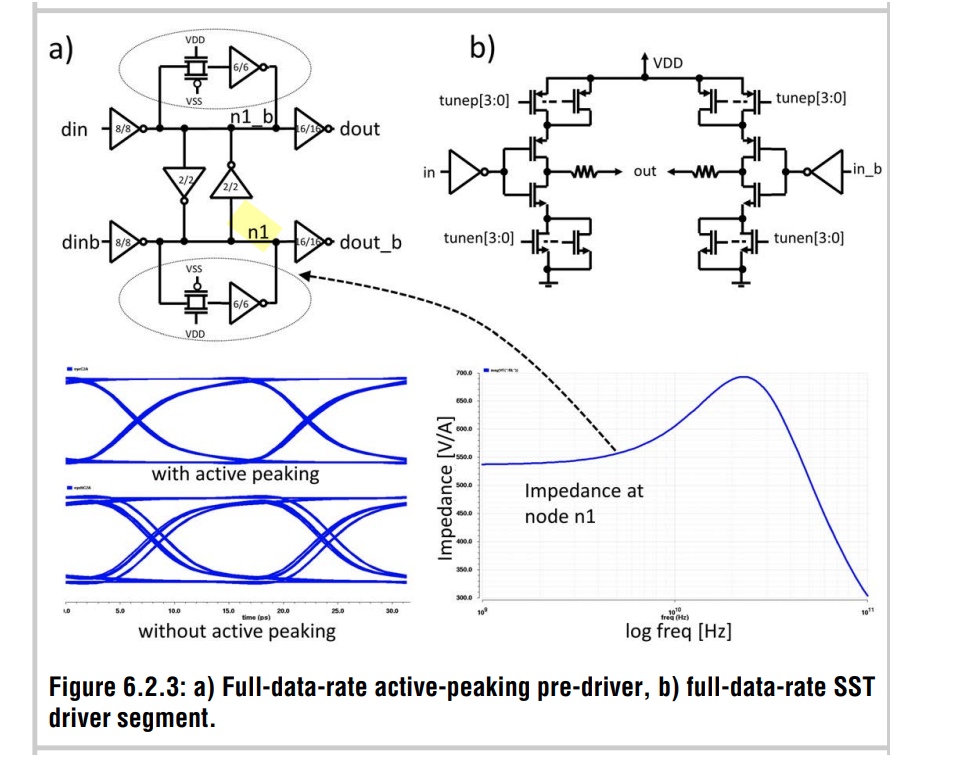
C. Menolfi et al., "A 112Gb/S 2.6pJ/b 8-Tap FFE PAM-4 SST TX
in 14nm CMOS," 2018 IEEE International Solid-State Circuits
Conference - (ISSCC), San Francisco, CA, USA, 2018, pp. 104-106 [slidespaper]
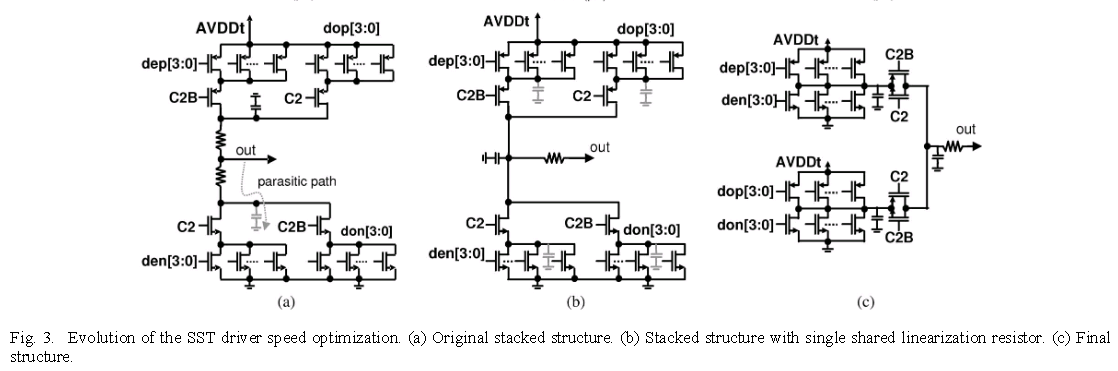
SST Driver
sharing termination in
SST transmitter
Sharing termination keep a constant current through leg, which
improve TX speed in this way. On the other hand, the sharing termination
facilitate drain/source sharing technique in layout.
pull-up and pull-down
resistor
Original stacked structure
Pro's:
smaller static current when both pull up and pull down path is
on
Con's:
slowly switching due to parasitic capacitance behind pull-up and
pull-down resistor
with single shared linearization resistor
Pro's:
The parasitic capacitance behind the resistor still exists but is
now always driven high or low actively
Con's:
more static current
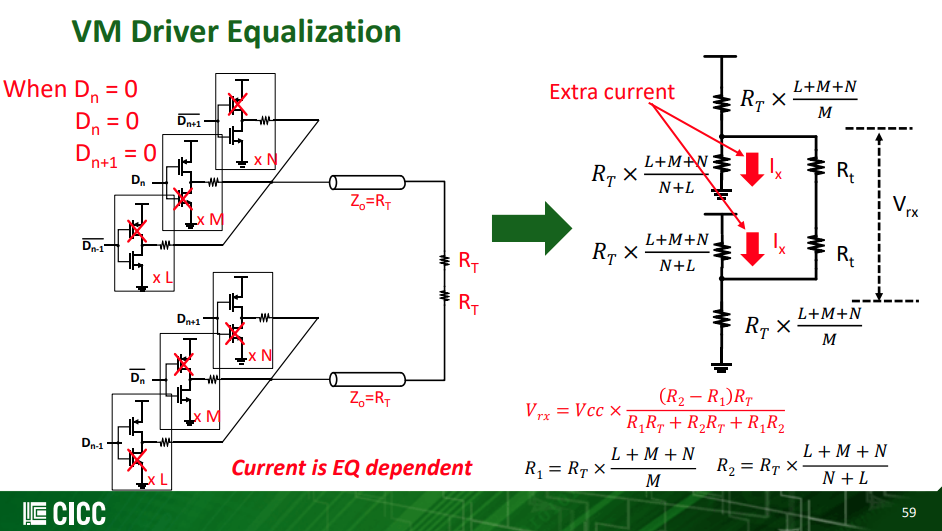
VM
Driver Equalization - differential ended termination
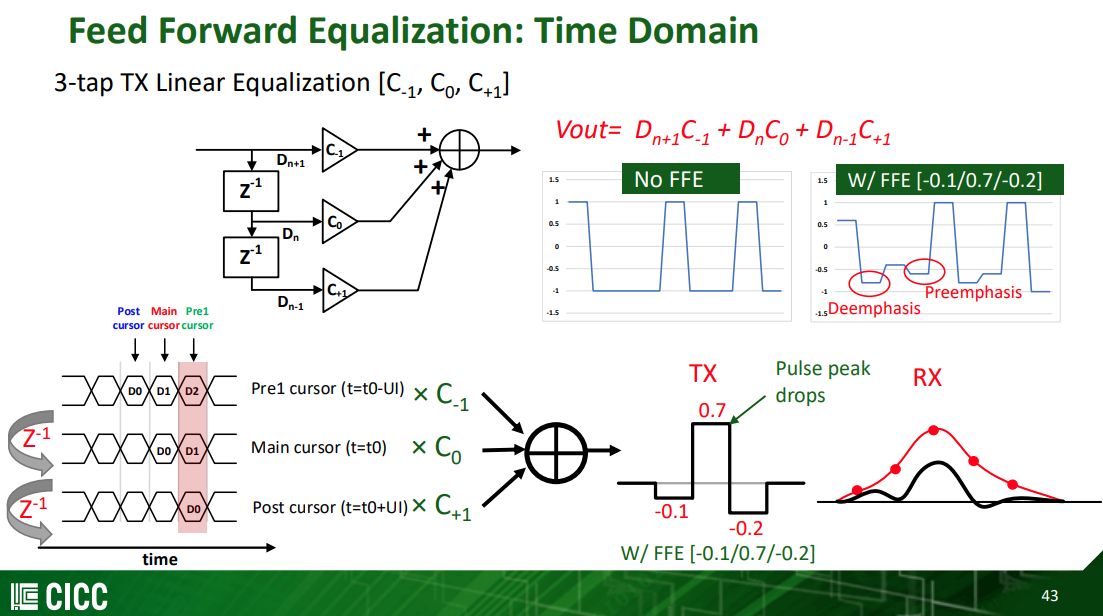
\[
V_o = D_{n+1}C_{-1}+D_nC_0+D_{n-1}C_{+1}
\]
where \(D_n \in \{-1, 1\}\)
\[
V_{\text{rx}} = V_{\text{dd}} \frac{(R_2-R_1)R_T}{R_1R_T+R_2R_T+R_1R_2}
\] With \(R_u=(L+M+N)R_T\)
\[\begin{align}
V_{\text{rxp}} &= \frac{1}{2} \cdot \frac{N}{L+M+N} \\
V_{\text{rxm}} &= \frac{1}{2} \cdot \frac{L+M}{L+M+N}
\end{align}\] So \[
V_{L}= \frac{1}{2}\cdot\frac{N-(L+M)}{L+M+N}
\] which is same with differential ended termination
Equation-2
\[\begin{align}
V_{\text{rxp}} &= \frac{1}{2} \\
V_{\text{rxm}} &= 0
\end{align}\] So \[
V_{M}= \frac{1}{2}
\] which is same with differential ended termination
Which can be simpified as \[\begin{align}
V_{\text{rx}} &= \frac{1}{2}(V_p - V_m) \\
&= \frac{1}{2}(\frac{2}{3}(2V_{\text{MSB}}+V_{\text{LSB}})-1) \\
&=\frac{1}{3}(2V_{\text{MSB}}+V_{\text{LSB}})-\frac{1}{2}
\end{align}\]
The above eqations demonstrate that the output \(V_{\text{rx}}\) is the linear sum of
MSB and LSB; LSB and
MSB have relative weight, i.e. 1 for LSB and
2 for MSB.
Assume pre cusor has \(L\) legs,
main cursor \(M\) legs and post cursor
\(N\) legs, which is same with the
convention in "Voltage-Mode Driver Equalization"
The number of legs connected with supply can expressed as \[
n_{up} = (1-d_{n+1})L + d_{n}M + (1-d_{n-1})N
\] Where \(d_n \in \{0, 1\}\),
or \[
n_{up} = \frac{1}{2}(-D_{n+1}+1)L + \frac{1}{2}(D_{n}+1)M +
\frac{1}{2}(-D_{n-1}+1)N
\] Where \(D_n \in \{-1,
+1\}\)
Then the number of legs connected with ground is \[
n_{dn}=L+M+N-n_{up}
\] where \(n_{up}+n_{dn}=L+M+N\)
Voltage resistor divider \[\begin{align}
V_o &=
\frac{\frac{R_{U}}{n_{dn}}}{\frac{R_U}{n_{dn}}+\frac{R_U}{n_{up}}} \\
&= \frac{1}{2}- \frac{1}{2}D_{n+1}\frac{L}{L+M+N}+
\frac{1}{2}D_{n}\frac{M}{L+M+N}-\frac{1}{2}D_{n-1}\frac{N}{L+M+N} \\
&= \frac{1}{2}-\frac{1}{2}D_{n+1}\cdot l+ \frac{1}{2}D_{n}\cdot
m-\frac{1}{2}D_{n-1}\cdot n
\end{align}\]
where \(l+m+n=1\)
\(V_{\text{MSB}}\) and \(V_{\text{LSB}}\) can be obtained
\[\begin{align}
V_{\text{MSB}} &= \frac{1}{2}-\frac{1}{2}D^{\text{MSB}}_{n+1}\cdot
l+ \frac{1}{2}D^{\text{MSB}}_{n}\cdot
m-\frac{1}{2}D^{\text{MSB}}_{n-1}\cdot n \\
V_{\text{LSB}} &= \frac{1}{2}-\frac{1}{2}D^{\text{LSB}}_{n+1}\cdot
l+ \frac{1}{2}D^{\text{LSB}}_{n}\cdot
m-\frac{1}{2}D^{\text{LSB}}_{n-1}\cdot n
\end{align}\]
Substitute the above equation into \(V_{\text{rx}}\), we obtain the relationship
between driver legs and FFE coefficients
After scaling, we obtain \[
V_{\text{rx}} = -l\cdot(2 \cdot
D^{\text{MSB}}_{n+1}+D^{\text{LSB}}_{n+1})+ m\cdot(2\cdot
D^{\text{MSB}}_{n}+D^{\text{LSB}}_{n}) - n \cdot(2\cdot
D^{\text{MSB}}_{n-1}+D^{\text{LSB}}_{n-1})
\] Where \(C_{-1} = l\), \(C_0 = m\) and \(C_{1}=n\), which is same with that of
NRZ
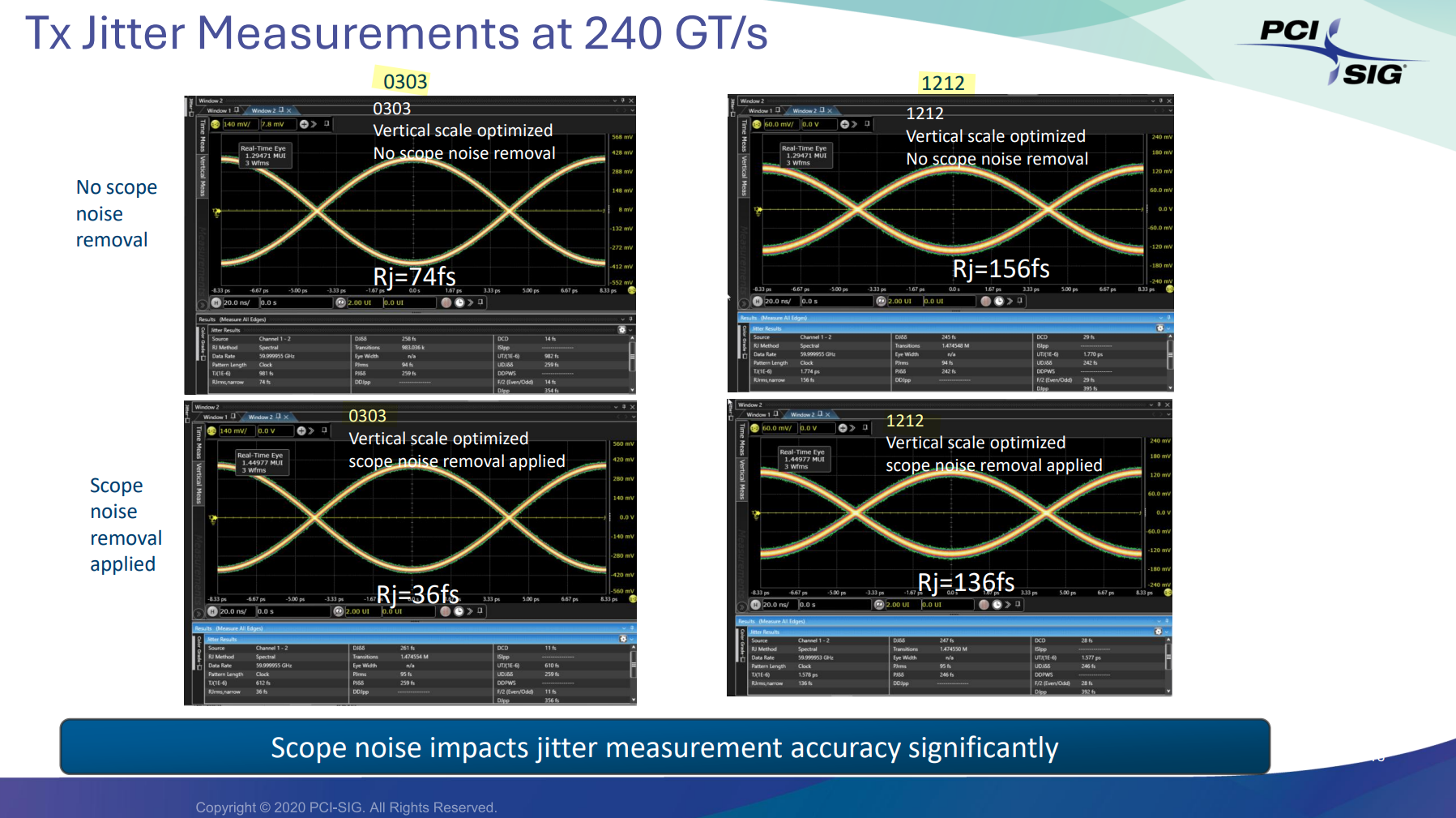
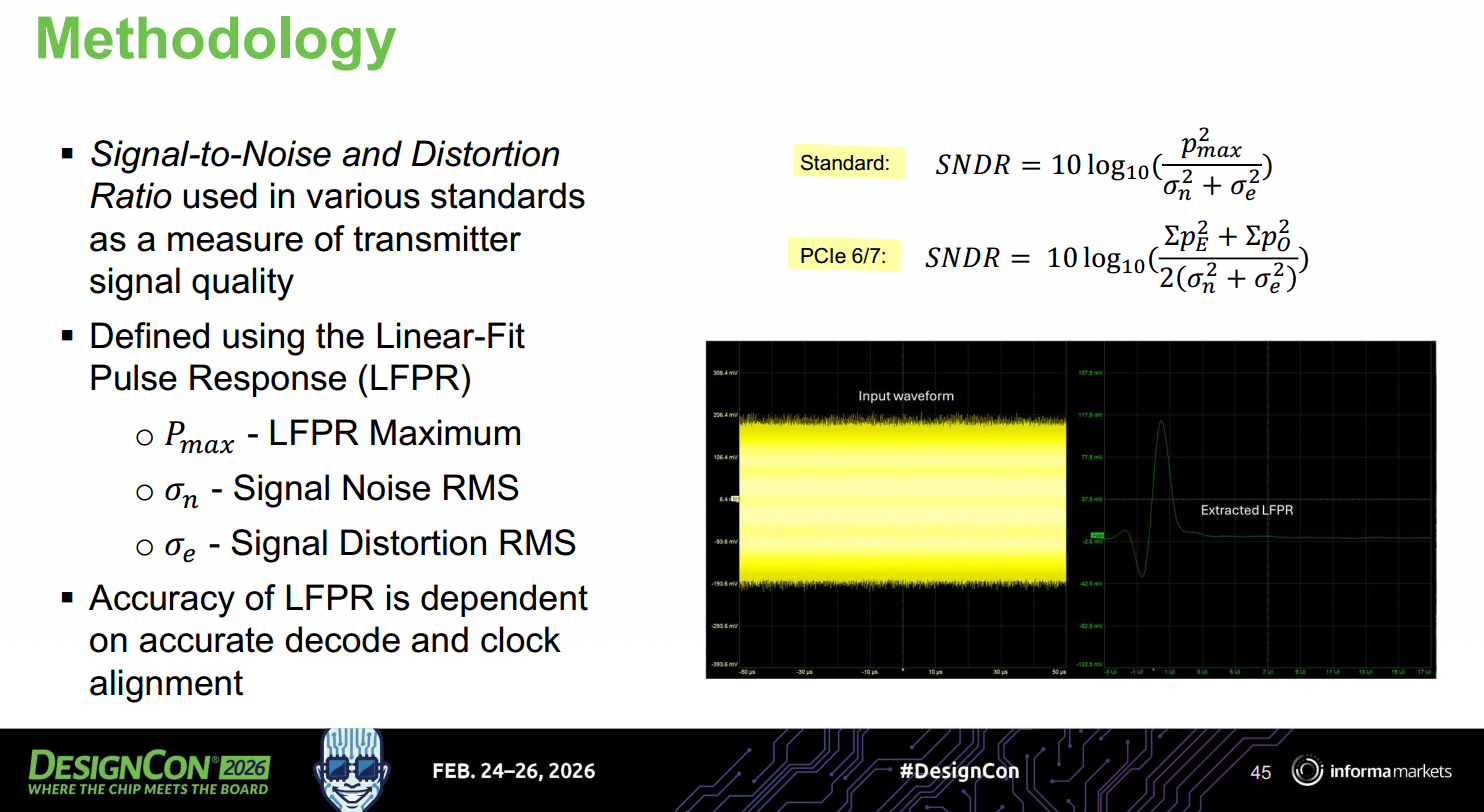
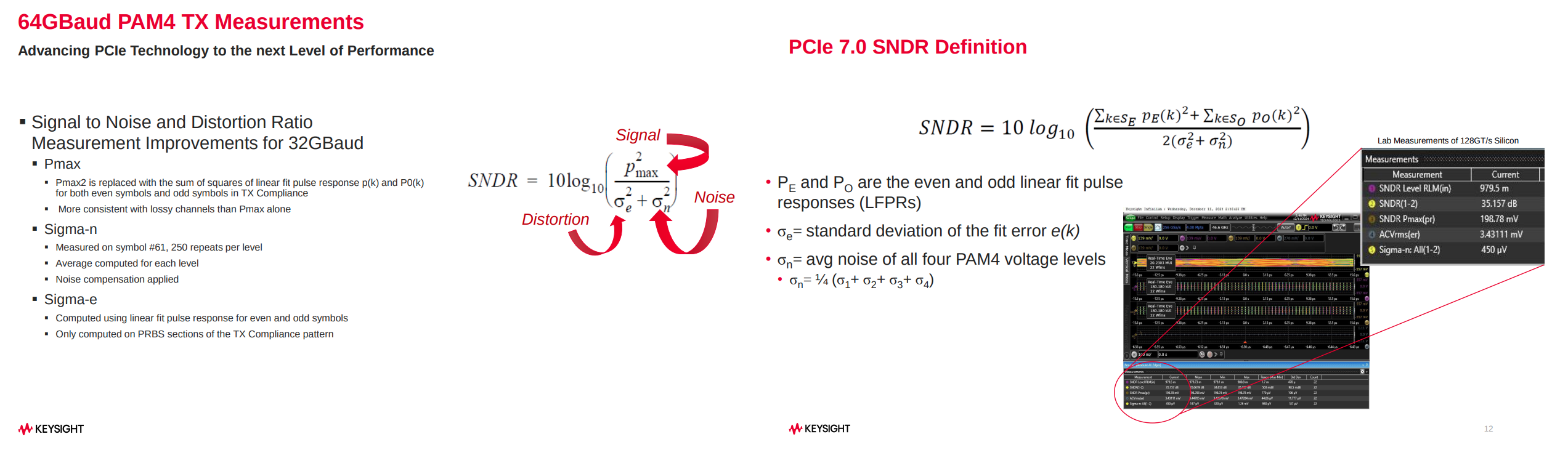
Hsinho Wu, Intel. DesignCon 2021: SNDR Analysis & Its Impacts on
Link Performance
Christiaan Bil (Intel), DesignCon 2026. An Experimental Study of PCIe
Transmitter Equalization Preset Measurement Methods for 64 and 128 GT/s
PAM4 Signaling
J. F. Bulzacchelli et al., "A 28-Gb/s 4-Tap FFE/15-Tap DFE Serial
Link Transceiver in 32-nm SOI CMOS Technology," in IEEE Journal of
Solid-State Circuits, vol. 47, no. 12, pp. 3232-3248, Dec. 2012, doi:
10.1109/JSSC.2012.2216414.
C. Menolfi et al., "A 112Gb/S 2.6pJ/b 8-Tap FFE PAM-4 SST TX in 14nm
CMOS," 2018 IEEE International Solid - State Circuits Conference -
(ISSCC), 2018, pp. 104-106, doi: 10.1109/ISSCC.2018.8310205.
E. Chong et al., "A 112Gb/s PAM-4, 168Gb/s PAM-8 7bit DAC-Based
Transmitter in 7nm FinFET," ESSCIRC 2021 - IEEE 47th European Solid
State Circuits Conference (ESSCIRC), 2021, pp. 523-526, doi:
10.1109/ESSCIRC53450.2021.9567801.
Wang, Z., Choi, M., Lee, K., Park, K., Liu, Z., Biswas, A., Han, J.,
Du, S., & Alon, E. (2022). An Output Bandwidth Optimized 200-Gb/s
PAM-4 100-Gb/s NRZ Transmitter With 5-Tap FFE in 28-nm CMOS. IEEE
Journal of Solid-State Circuits, 57(1), 21-31.
https://doi.org/10.1109/JSSC.2021.3109562
J. Kim et al., "A 112Gb/s PAM-4 transmitter with 3-Tap FFE in 10nm
CMOS," 2018 IEEE International Solid - State Circuits Conference -
(ISSCC), 2018, pp. 102-104, doi: 10.1109/ISSCC.2018.8310204.
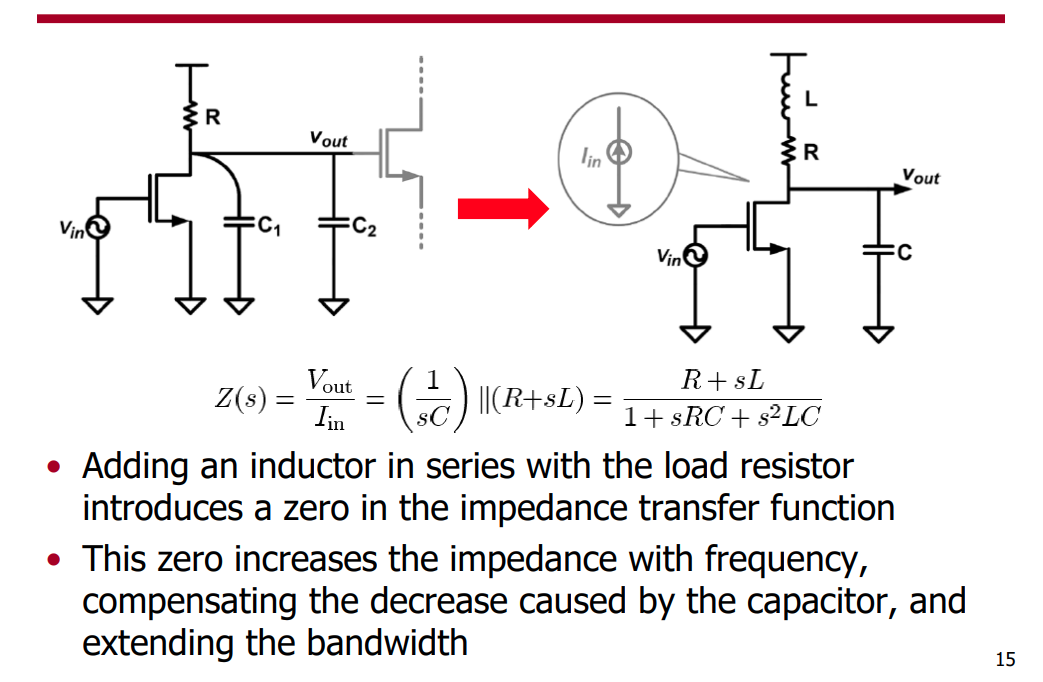
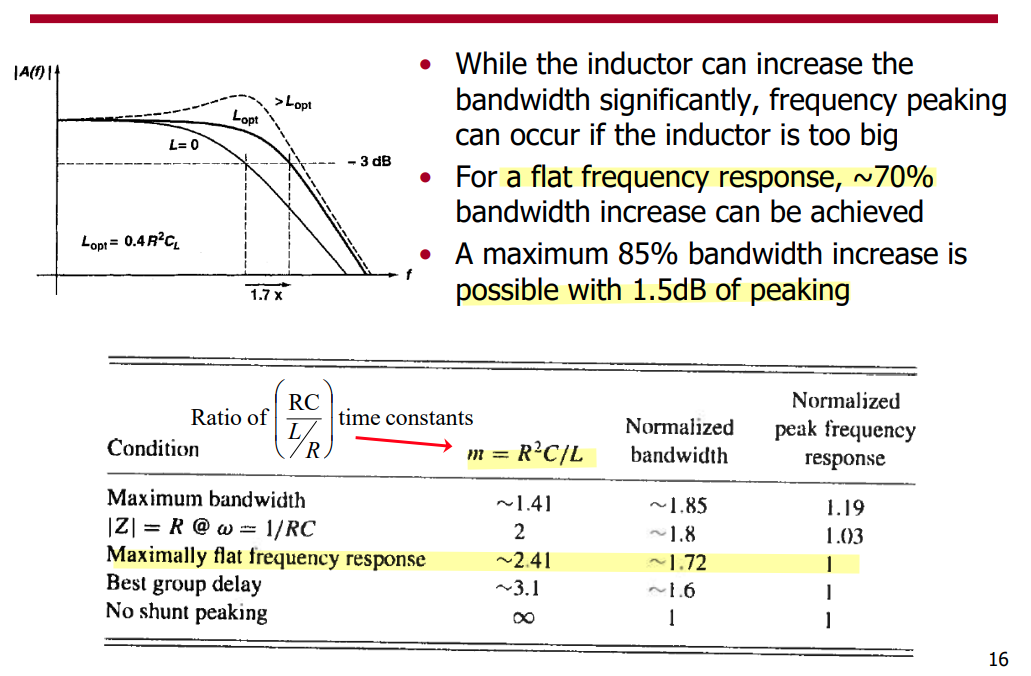
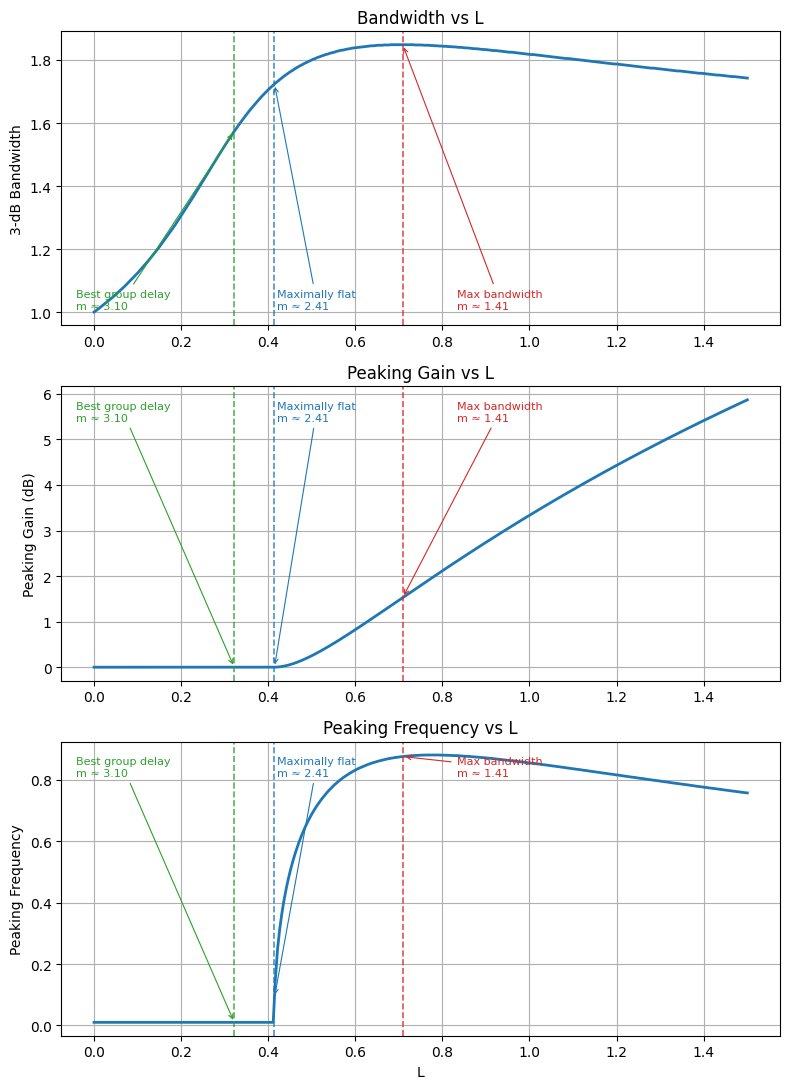
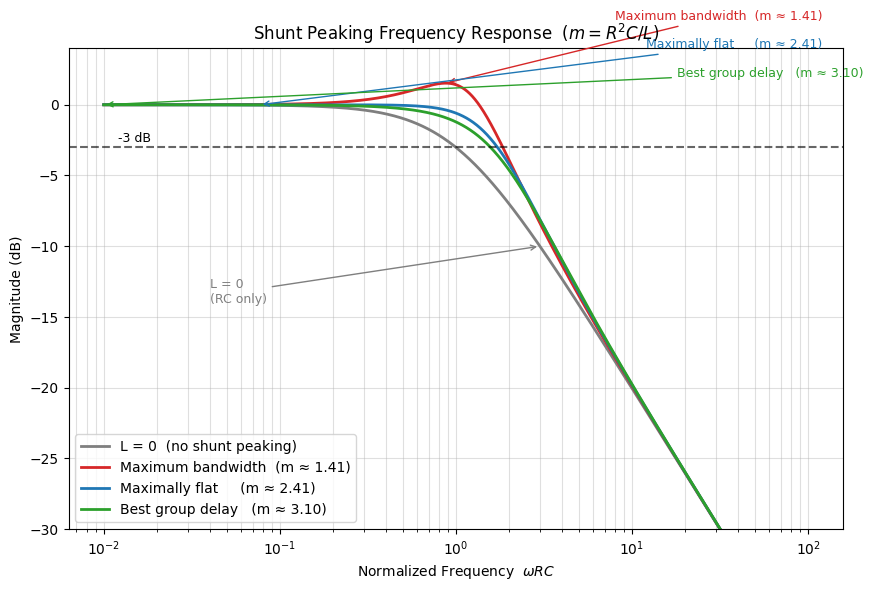
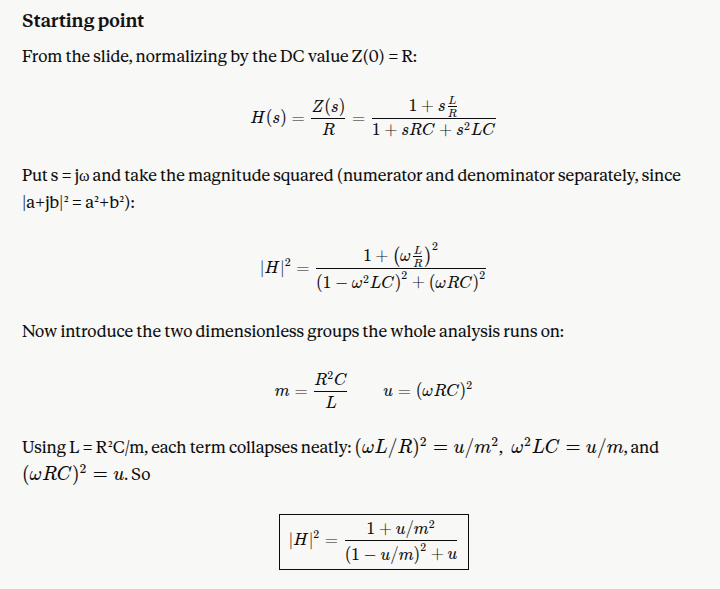
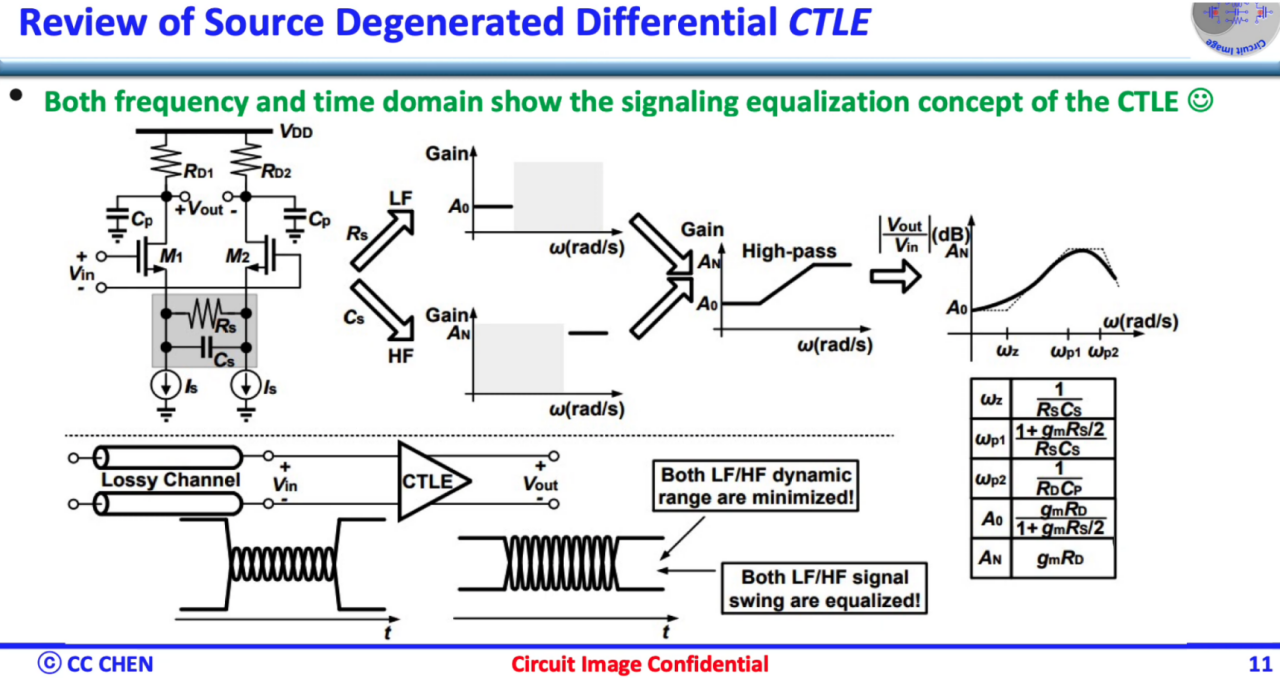
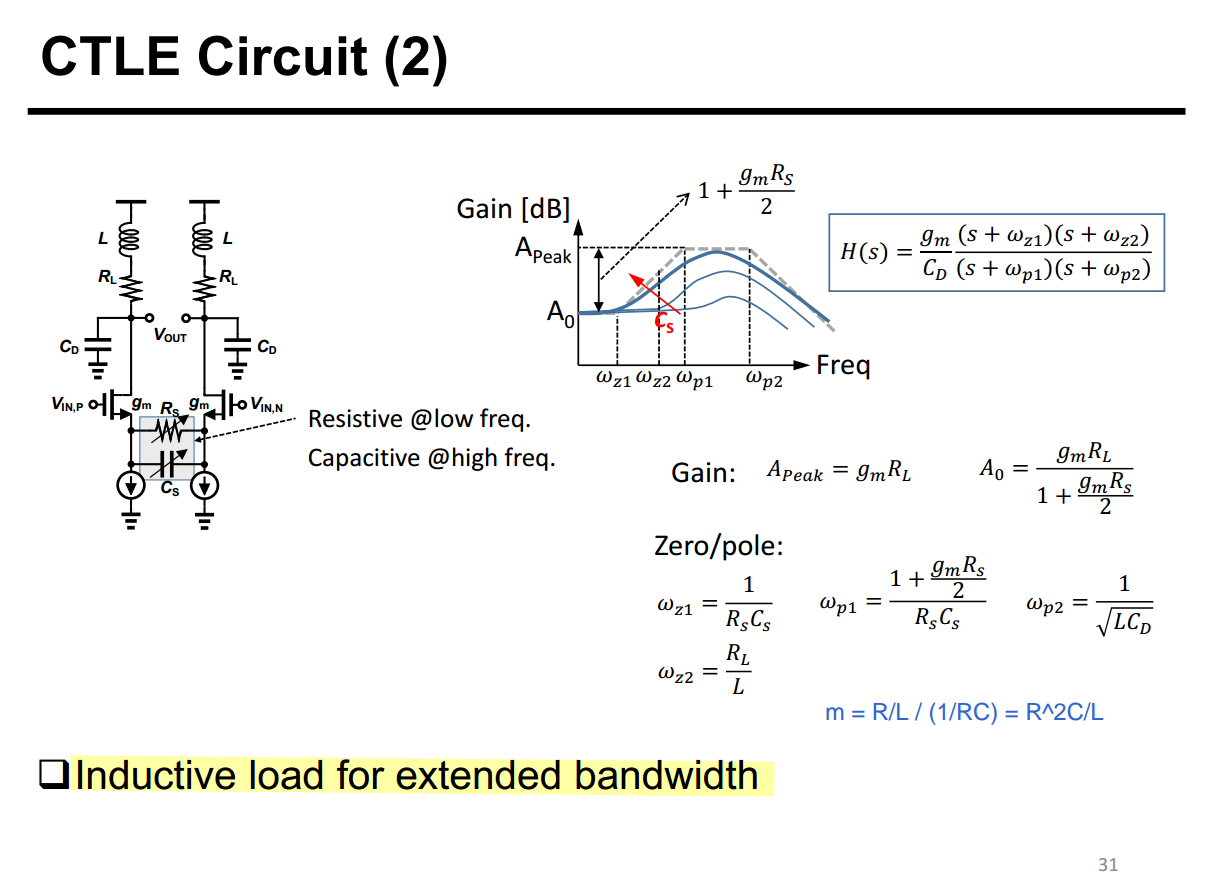
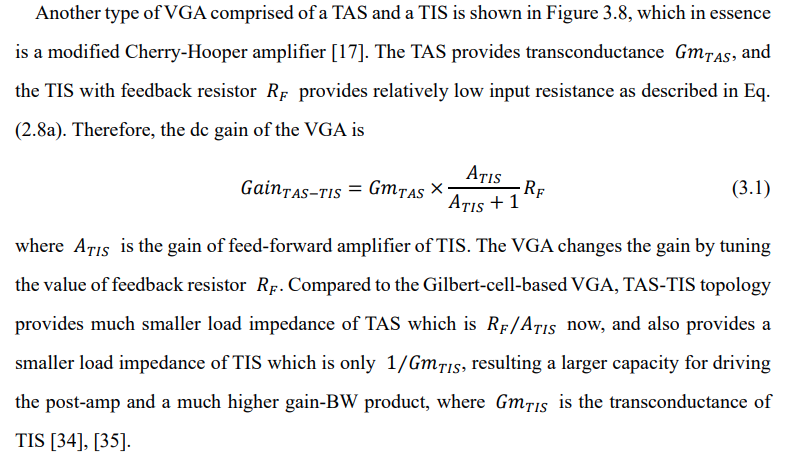
\(\color{red}m=\frac{R^2C}{L}\) is
the ratio of the \(R/L\) zero frequency
to the original RC pole frequency \(1/RC\), and therefore measures how
aggressively the zero compensates the intrinsic RC roll-off.
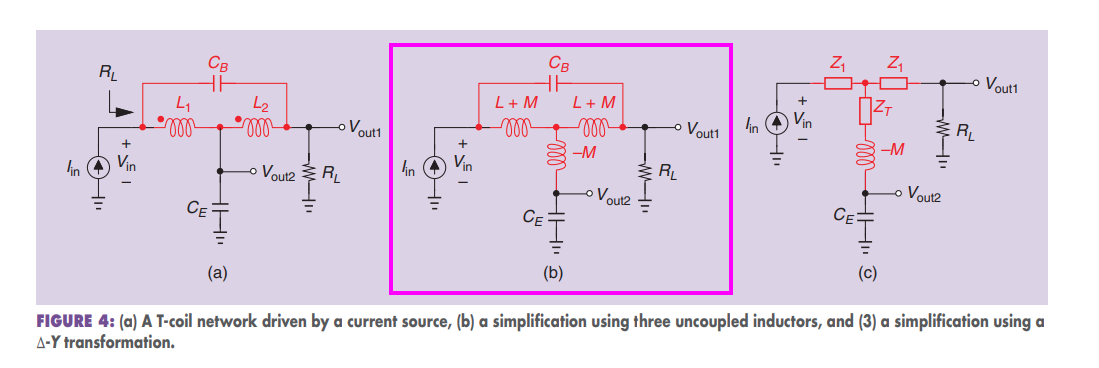
The negative inductor \(-M\) can be
seen as capacitor \[
-j\omega M = \frac{1}{j}\omega M = \frac{1}{j\omega \frac{1}{\omega^2
M}}
\] That is \(C_{-M} = \frac{1}{\omega^2
M} \approx 10 \times C_E\)
T-coil w/ inverted mutual
coupling
J. Kim, J. -K. Kim, B. -J. Lee and D. -K. Jeong, "Design Optimization
of On-Chip Inductive Peaking Structures for 0.13- μm CMOS 40-Gb/s
Transmitter Circuits," in IEEE Transactions on Circuits and Systems I:
Regular Papers, vol. 56, no. 12, pp. 2544-2555, Dec. 2009 [https://sci-hub.st/10.1109/TCSI.2009.2023772]
TODO 📅
Triple Resonance
TODO 📅
series resonance \(\omega_\text{res}\)
Assuming, \(I_\text{in}=\cos\omega_r
t\) and \(V_\text{out}=g\cos(\omega_r t
+\theta)\)
with \(I_\text{in} =
C_L\frac{\mathrm{d}V_\text{out}}{\mathrm{d}t}\), yield \(g=\sqrt{\frac{L}{C}}\) and \(\theta=- \frac{\pi}{2}\), i.e. \(V_\text{out} = \sqrt{\frac{L}{C}}\cos(\omega_r t -
\frac{\pi}{2})\)
where \[
K =
\frac{R_L||\frac{1}{g_{\text{m}_{\text{dio}}}}||\frac{1}{g_{\text{m}_{\text{tot}}}}}{R_L||g_\text{ds\_tot}}
\]
And \(A(s)\) can be expressed as
\[
A(s) =
\frac{\frac{s}{\omega_z}+1}{\frac{s^2}{\omega_n^2}+2\frac{\zeta}{\omega_n}s+1}
\] It magnitude in dB \[
A_\text{dB} =
10\log\frac{1+(\omega/\omega_z)^2}{1+(\omega/\omega_n)^4+2\omega^2(2\zeta^2-1)/\omega_n^2}
\] Substitute \(\omega_n\) with
Eq (2), followed is obtained \[
A_\text{dB} = 10\log{\frac{\alpha^2(\omega_z^4 +
\omega_z^2\omega^2)}{\alpha^2\omega_z^4+\omega^4+2\alpha\omega_z^2(2\zeta^2-1)\omega^2}}
\] peaking frequency \[
\omega_\text{peak} = \omega_z\cdot \sqrt{\sqrt{(\alpha+1)^2 - 4\alpha
\zeta^2}-1}
\] If \(\zeta=1\)\[
\omega_{A_\text{dB = 0dB} } = \sqrt{1-2/\alpha}\cdot \omega_{p0} \qquad
\omega_\text{peak} = \omega_z\sqrt{\alpha-2} \qquad
A_\text{dB,peak} = 10\log\frac{\alpha^2}{4(\alpha-1)}
\]
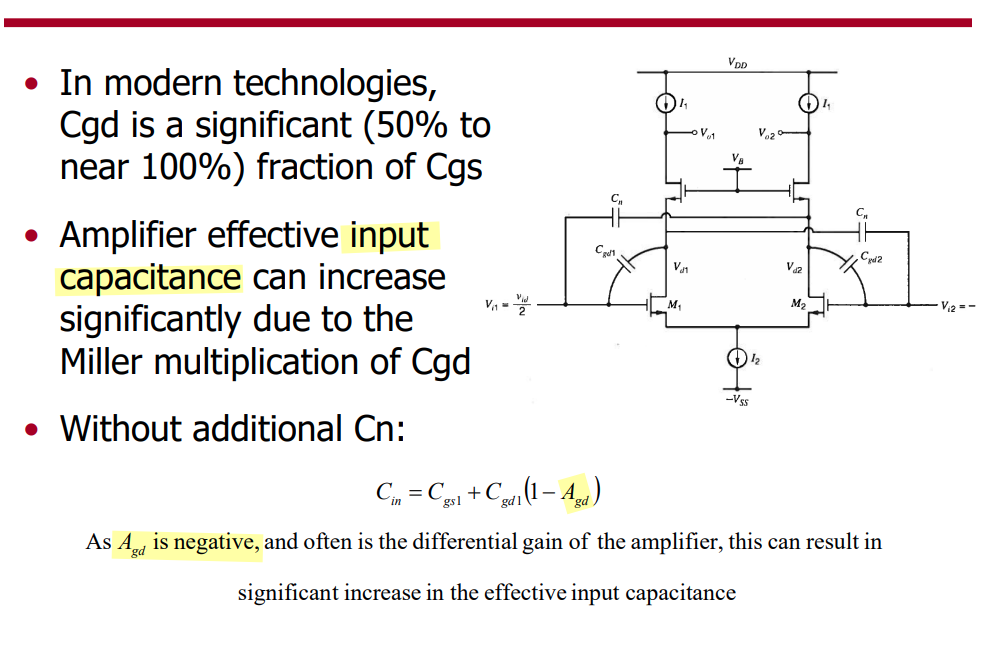
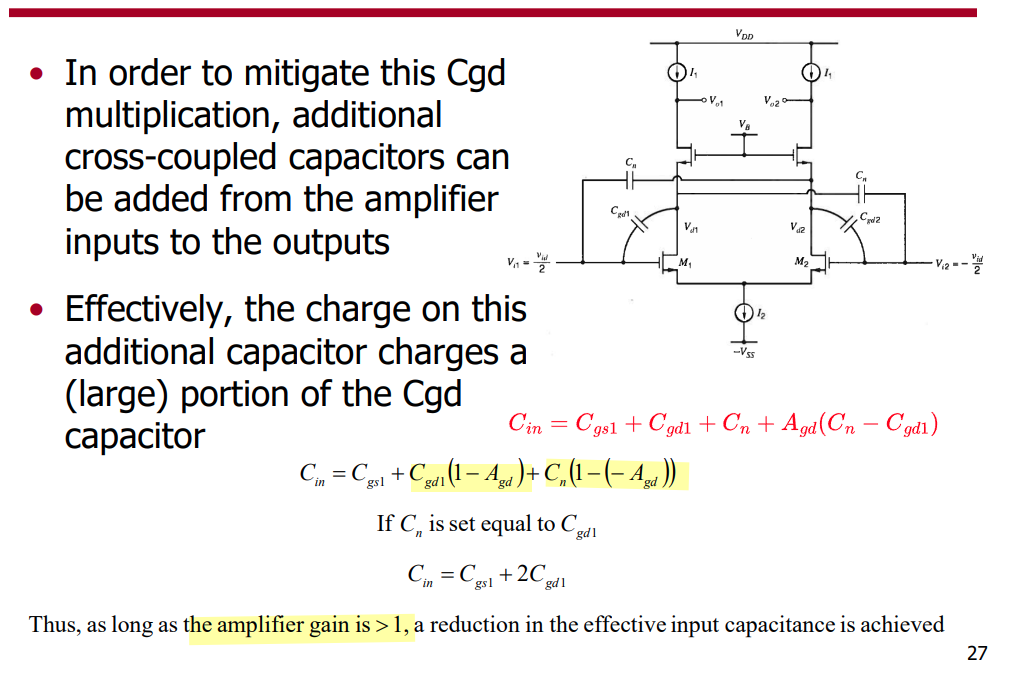
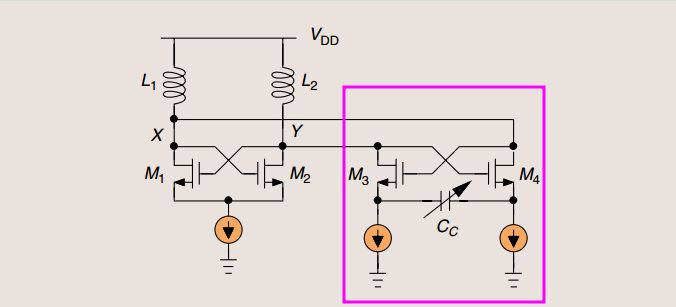
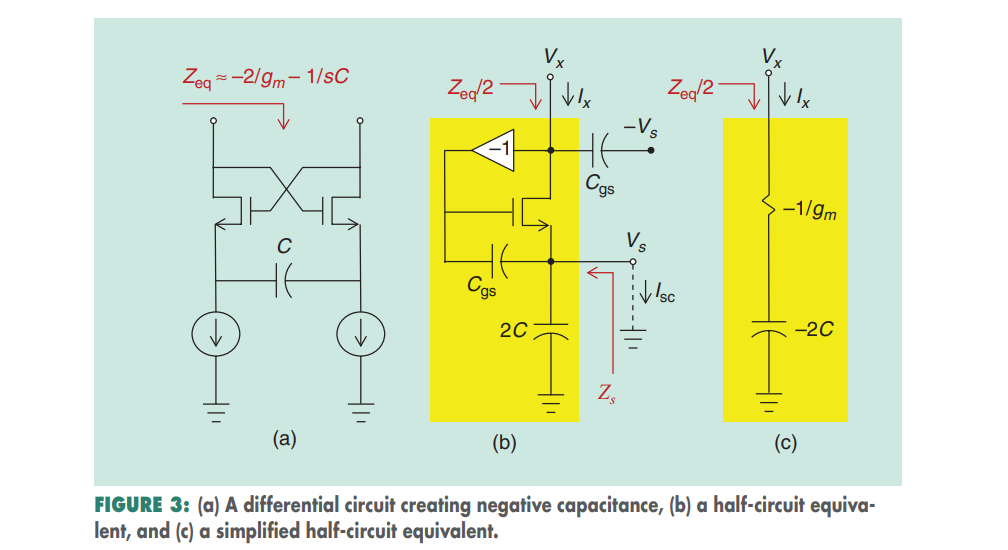
Negative Capacitance Circuit
Negative Miller Capacitance
S. Gondi and B. Razavi, "Equalization and Clock and Data Recovery
Techniques for 10-Gb/s CMOS Serial-Link Receivers," in IEEE Journal
of Solid-State Circuits, vol. 42, no. 9, pp. 1999-2011 [pdf]
\[
C_{d1} = C_{dd1} + (1+\frac{1}{|A_{gd}|})C_{gd1}
\] where \(A_{gd}\lt 0\)
For differential mode input, effective
input capacitance\[
C_{in} = C_{gs} +(1+A_{dm}) C_{gd}+\color{red}(1-A_{dm})C_n
\] and effective output capacitance\[
C_{out} = C_{dd} + (1+\frac{1}{A_{dm}})C_{gd}+\color{red}
(1-\frac{1}{A_{dm}})C_n
\] That is \(C_n\) deteriorate
the effective output capacitance
For common mode input, effective input
capacitance\[
C_{in} = C_{gs} + (1+A_{cm}) C_{gd}+ \color{red}(1+A_{cm})C_n
\] and effective output capacitance\[
C_{d1} = C_{dd} + (1+\frac{1}{A_{cm}})C_{gd}+\color{red}
(1+\frac{1}{A_{cm}})C_n
\] i.e., \(C_n\) deteriorate
both effective input capacitance and effective output capacitance,
unfortunately
effective input capacitance \(\Pi\)
model, which is appropriate for both differential input and common mode
input
Suppose \(C_n=C_{gd}\), effective
differential input capacitance is same with effective
common-mode input capacitance (\(C_n=\frac{A_{dm}-A_{cm}}{A_{dm}+A_{cm}}C_{gd}\))
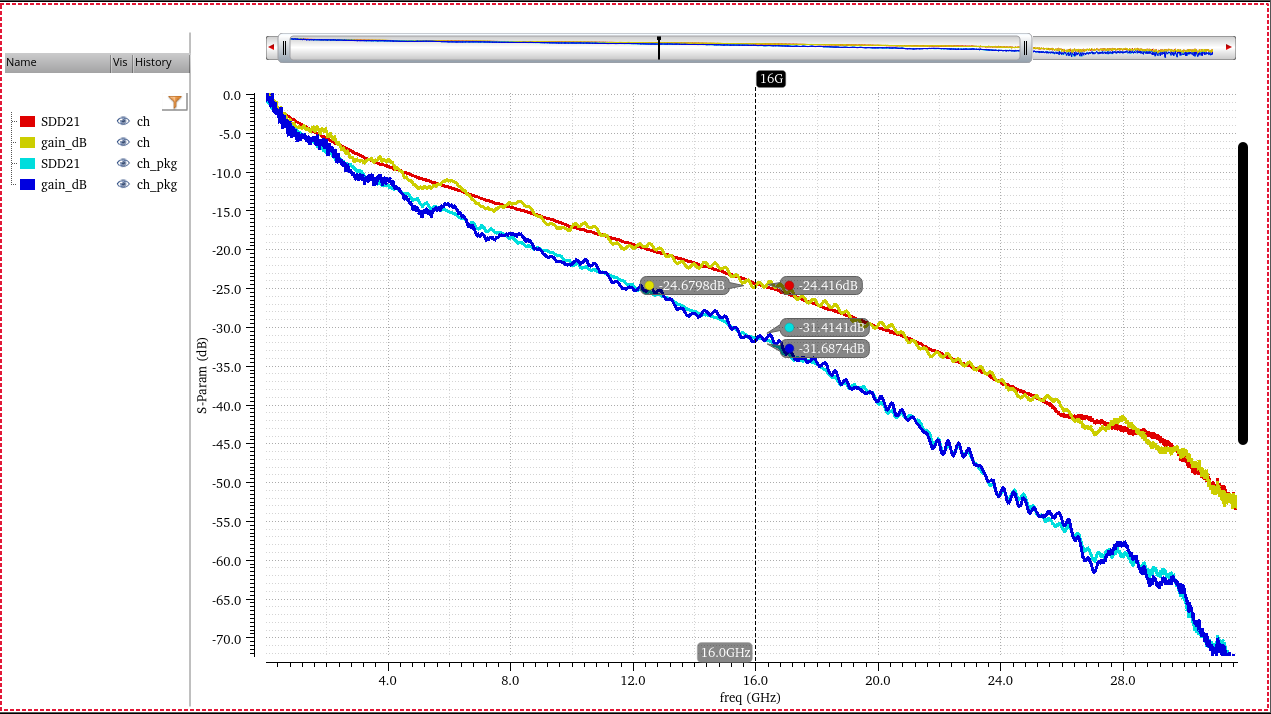
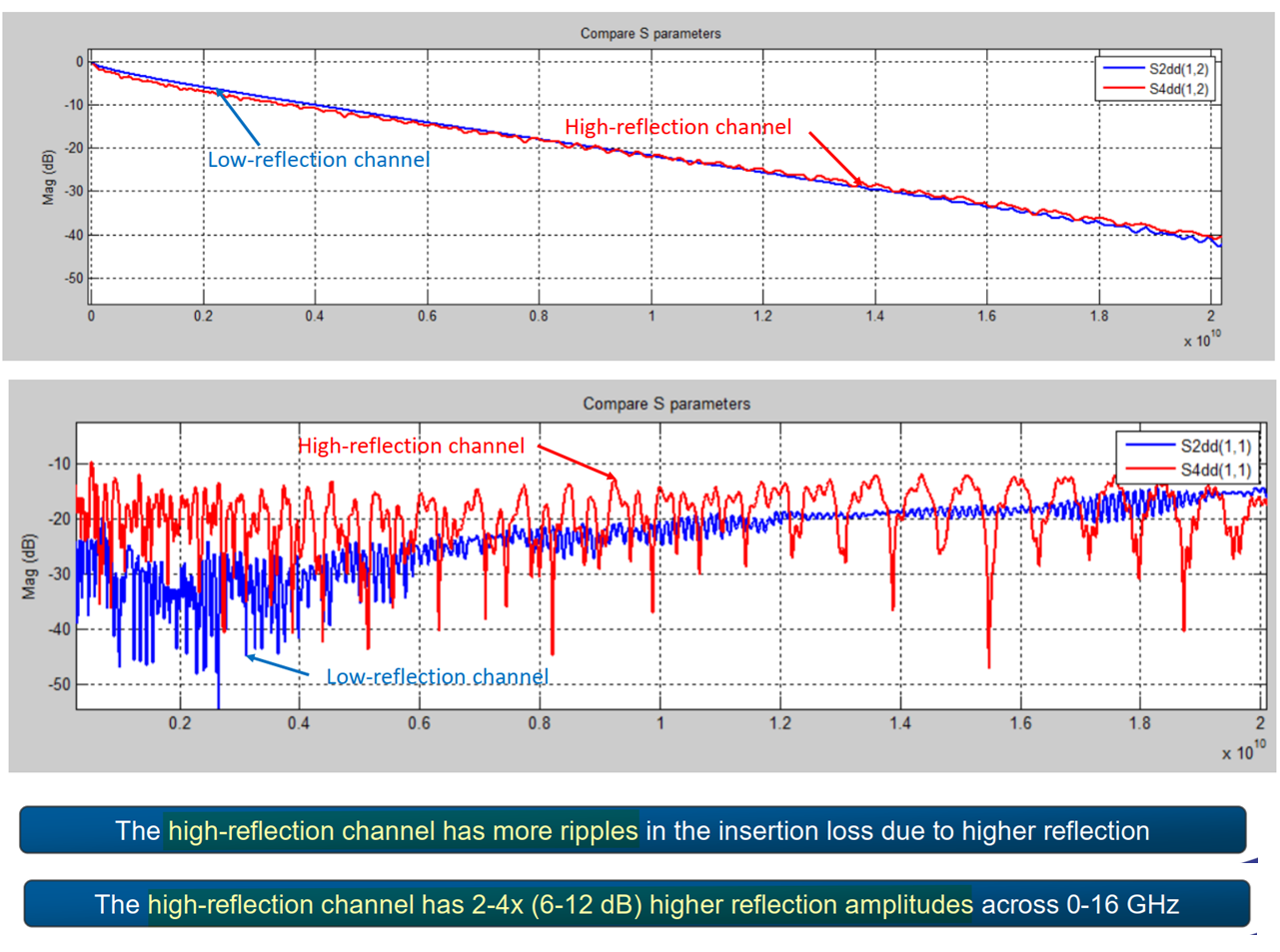
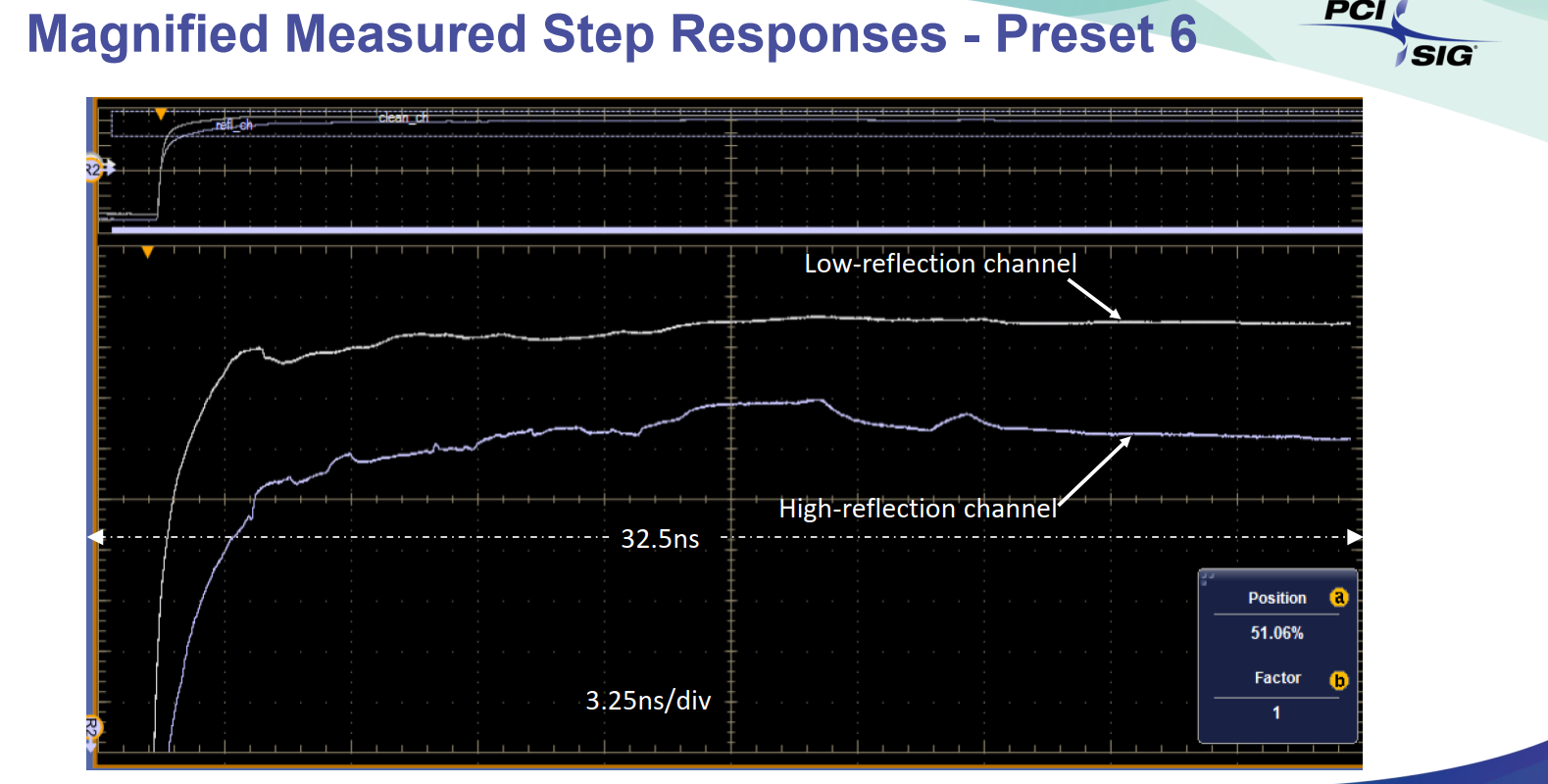
PCIe Gen6 Channel and Reference Package S4P Models for Rx Stressed
Eye Calibration
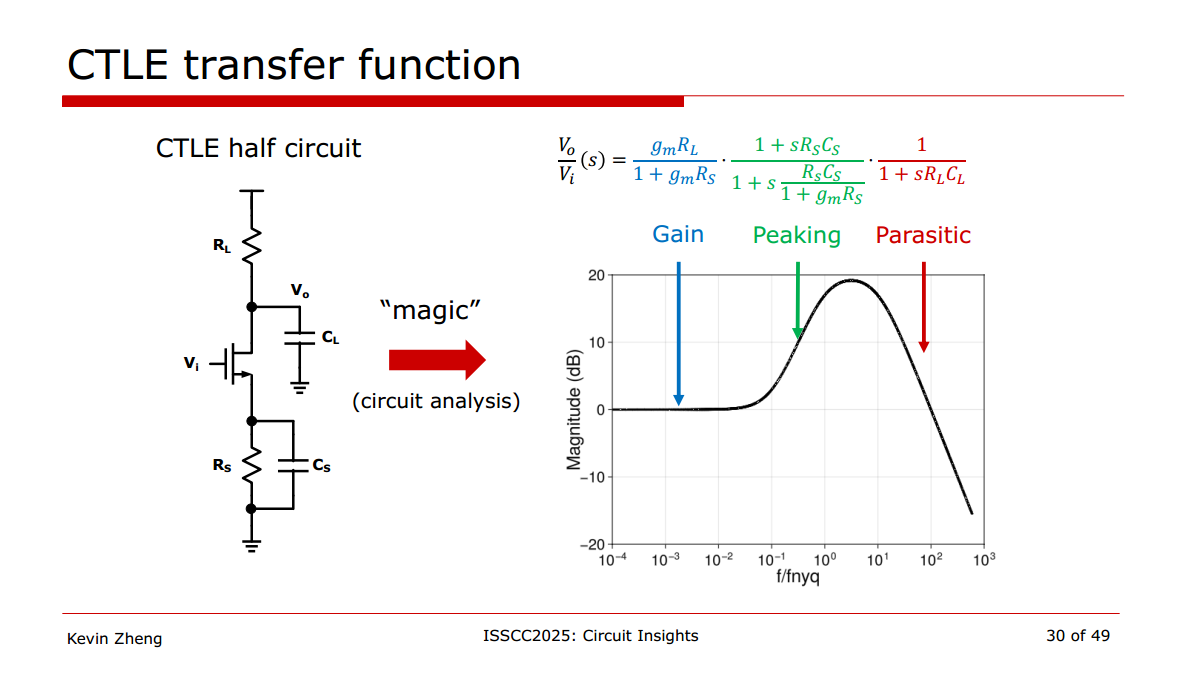
Above curve demonstrate that only zero is not enough to compensate
channel+pkg loss (>20 dB/decade), peaking or
Complex-Conjugate Poles is necessary
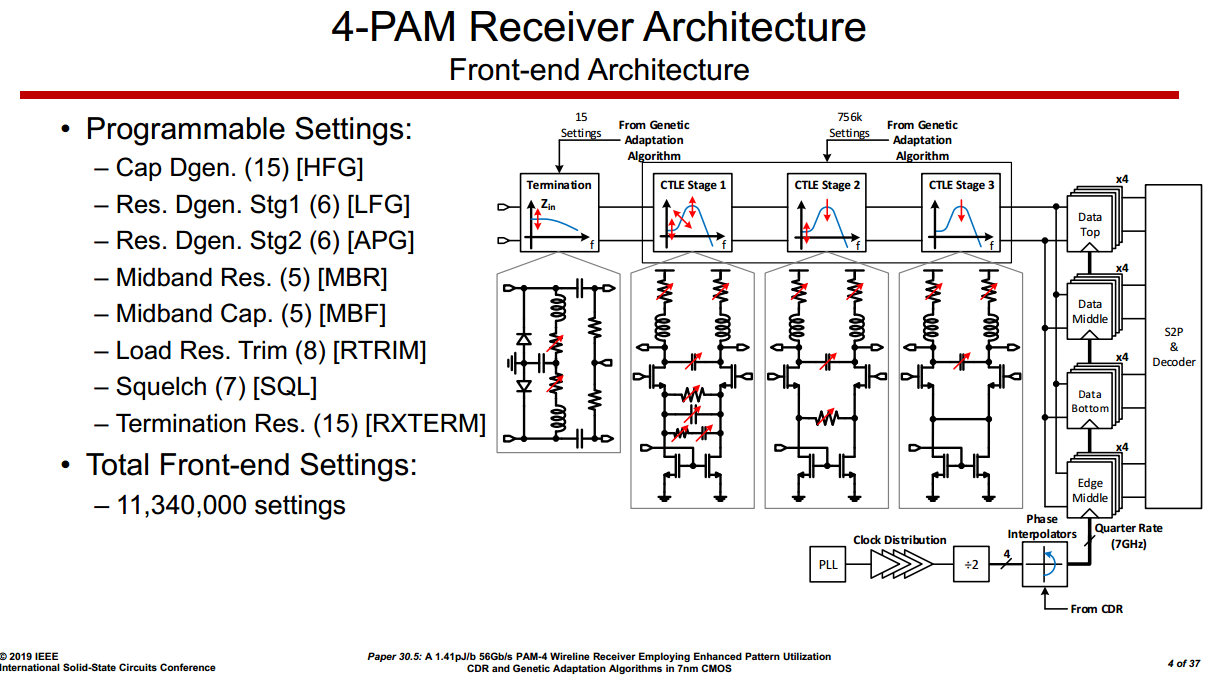
S. Shahramian et al., "30.5 A 1.41pJ/b 56Gb/s PAM-4 Wireline
Receiver Employing Enhanced Pattern Utilization CDR and Genetic
Adaptation Algorithms in 7nm CMOS," 2019 IEEE International
Solid-State Circuits Conference - (ISSCC), San Francisco, CA, USA,
2019 [pdf]
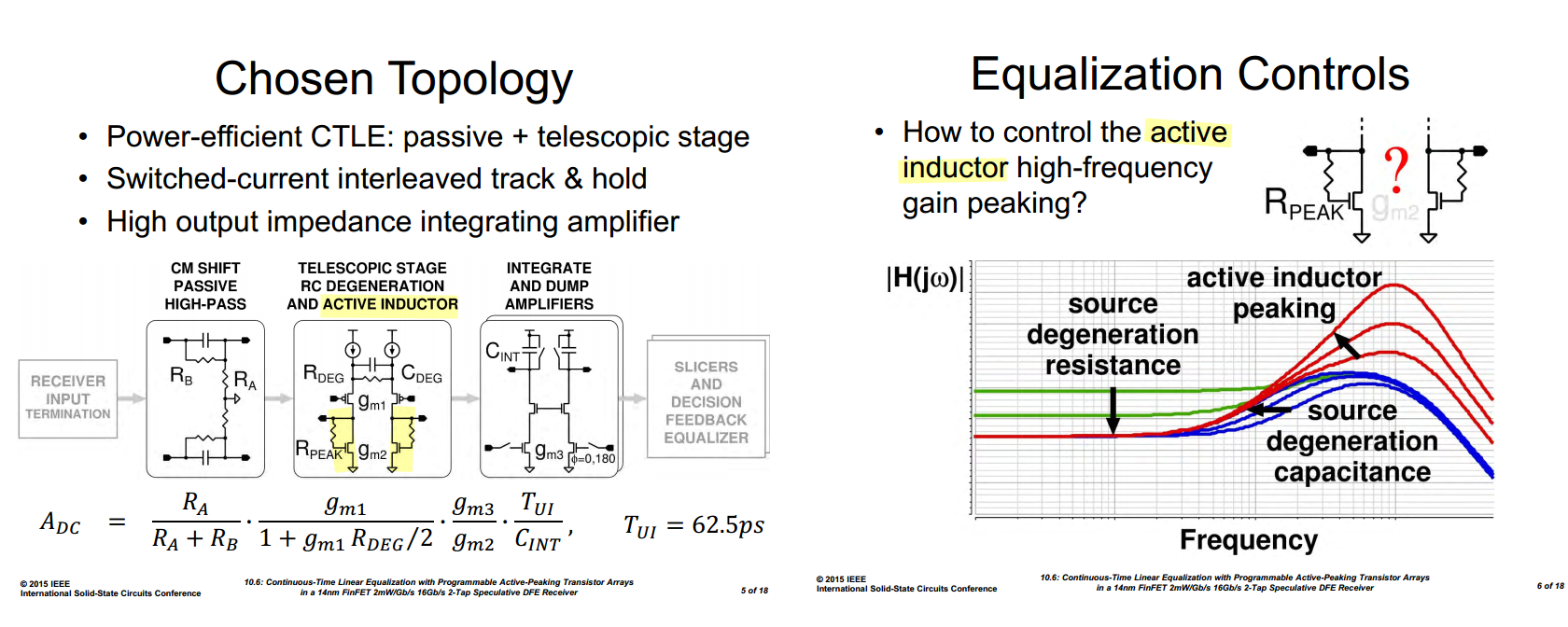
P. A. Francese et al., "10.6 continuous-time linear
equalization with programmable active-peaking transistor arrays in a
14nm FinFET 2mW/Gb/s 16Gb/s 2-Tap speculative DFE receiver," 2015
IEEE International Solid-State Circuits Conference - (ISSCC) Digest of
Technical Papers, San Francisco, CA, USA, 2015 [pdf]
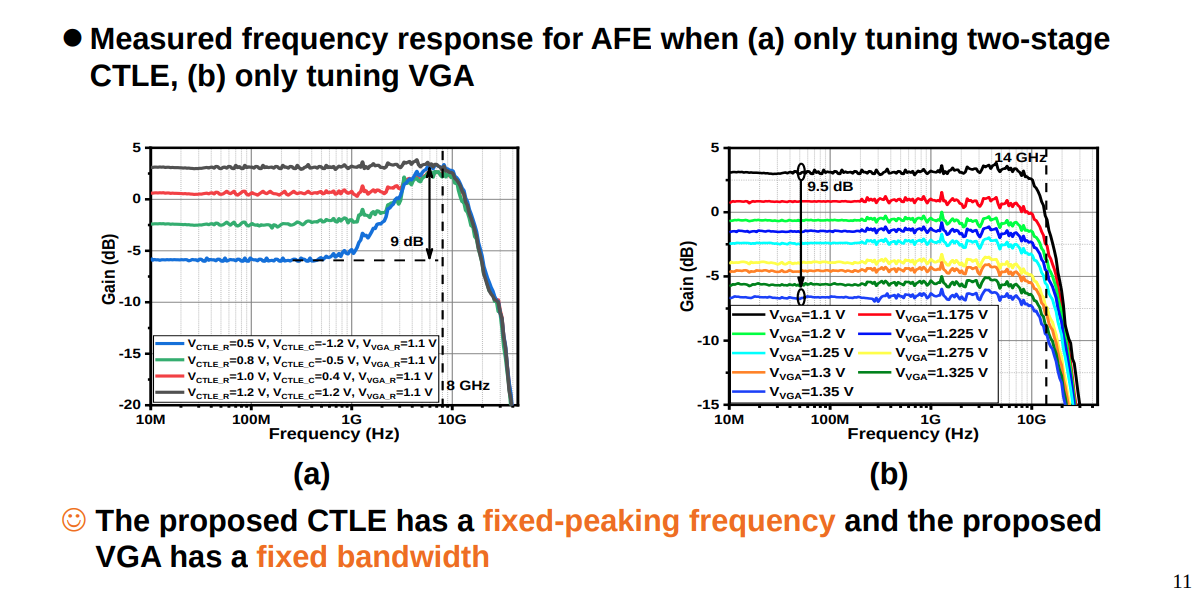
Z. Li, M. Tang, T. Fan and Q. Pan, "A 56-Gb/s PAM4 Receiver Analog
Front-End With Fixed Peaking Frequency and Bandwidth in 40-nm CMOS," in
IEEE Transactions on Circuits and Systems II: Express Briefs,
vol. 68, no. 9, pp. 3058-3062, Sept. 2021 [slides]
[paper]
In the active copper cable (ACC) application, it is necessary to give
different equalizations at the same frequency according to different
cable lengths, Therefore, the AFE with fixed peaking
frequency and constant bandwidth
is desirable for these applications
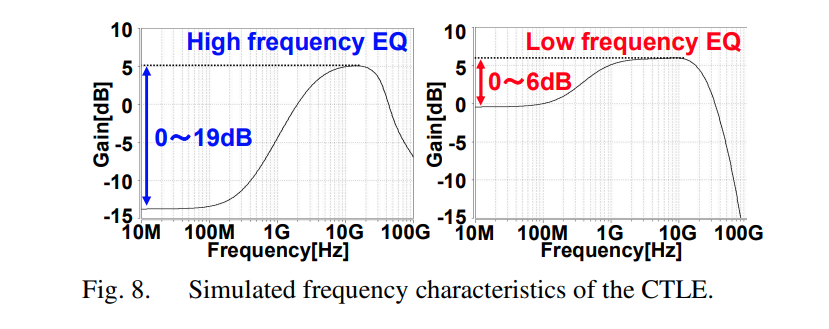
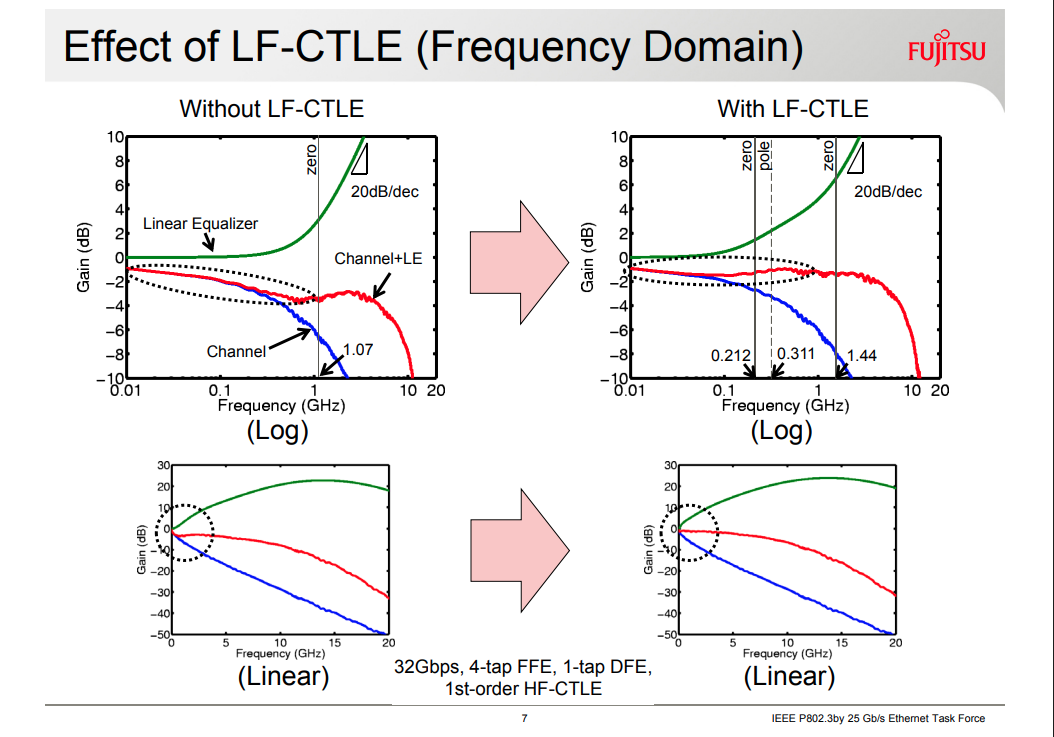
Low-Frequency CTLE (LF-CTLE)
S. Parikh et al., "A 32Gb/s wireline receiver with a
low-frequency equalizer, CTLE and 2-tap DFE in 28nm CMOS," 2013 IEEE
International Solid-State Circuits Conference Digest of Technical
Papers, San Francisco, CA, USA, 2013 [https://sci-hub.se/10.1109/ISSCC.2013.6487622]
T. Shibasaki et al., "A 56-Gb/s receiver front-end with a
CTLE and 1-tap DFE in 20-nm CMOS," 2014 Symposium on VLSI Circuits
Digest of Technical Papers, Honolulu, HI, USA, 2014, pp. 1-2
H. Kimura et al., "A 28 Gb/s 560 mW Multi-Standard SerDes
With Single-Stage Analog Front-End and 14-Tap Decision Feedback
Equalizer in 28 nm CMOS," in IEEE Journal of Solid-State
Circuits, vol. 49, no. 12, pp. 3091-3103, Dec. 2014 [https://ieeexplore.ieee.org/ielx7/4/6963535/06894632.pdf]
Pisati, et.al., "Sub-250mW 1-to-56Gb/s Continuous-Range PAM-4 42.5dB
IL ADC/DAC- Based Transceiver in 7nm FinFET," 2019 IEEE International
Solid-State Circuits Conference (ISSCC), 2019 [https://sci-hub.se/10.1109/ISSCC.2019.8662428]
Z. Li, M. Tang, T. Fan and Q. Pan, "A 56-Gb/s PAM4 Receiver Analog
Front-End With Fixed Peaking Frequency and Bandwidth in 40-nm CMOS," in
IEEE Transactions on Circuits and Systems II: Express Briefs,
vol. 68, no. 9, pp. 3058-3062, Sept. 2021 [slides]
[paper]
K. Kwon et al., "A 212.5Gb/s Pam-4 Receiver With Mutual
Inductive Coupled Gm-Tia in 4nm Finfet," 2025 Symposium on VLSI
Technology and Circuits (VLSI Technology and Circuits), Kyoto,
Japan, 2025
Bae, W. (2019). CMOS Inverter as Analog Circuit: An Overview.
Journal of Low Power Electronics and Applications. [pdf]
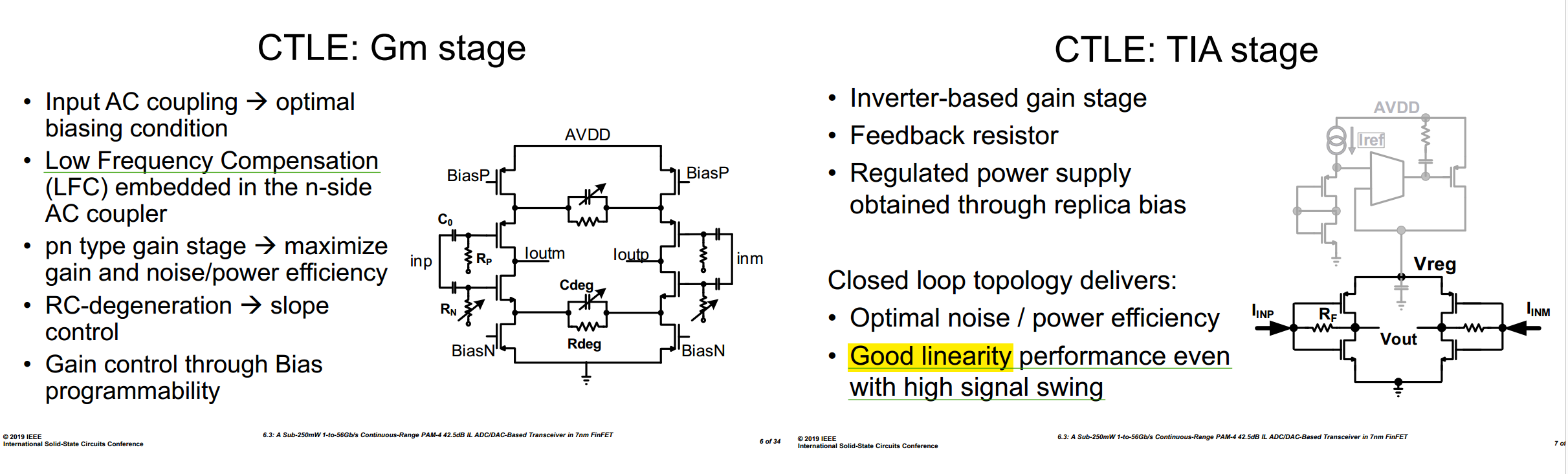
CTLE, with Gm + TIA structure
Chongyun ZHANG, 2025, "Energy-Efficient CMOS Optical Receiver for
Short-Reach Data Center Application,". [slides,
paper]
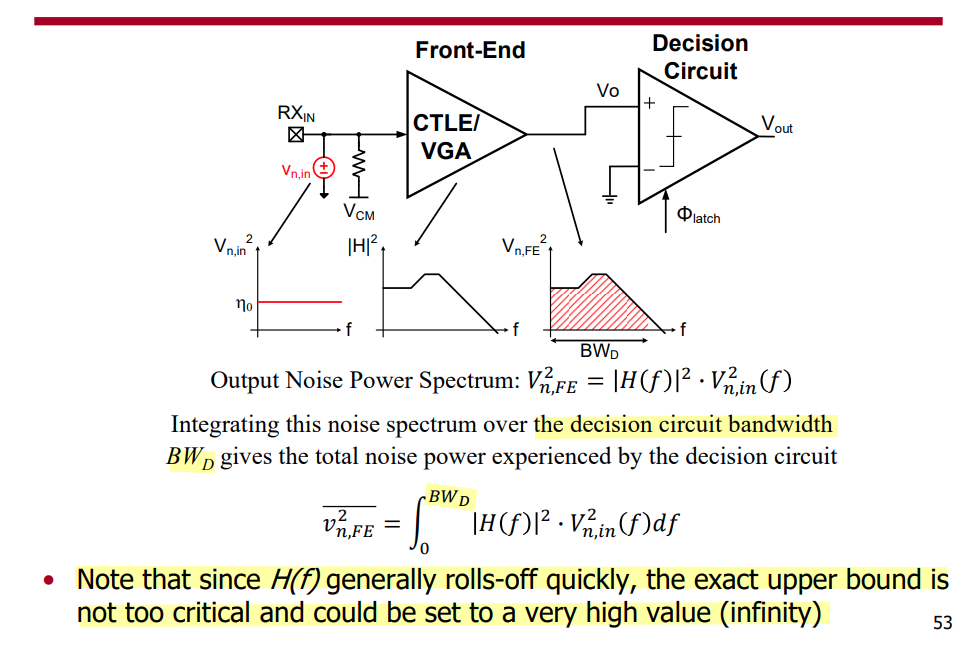
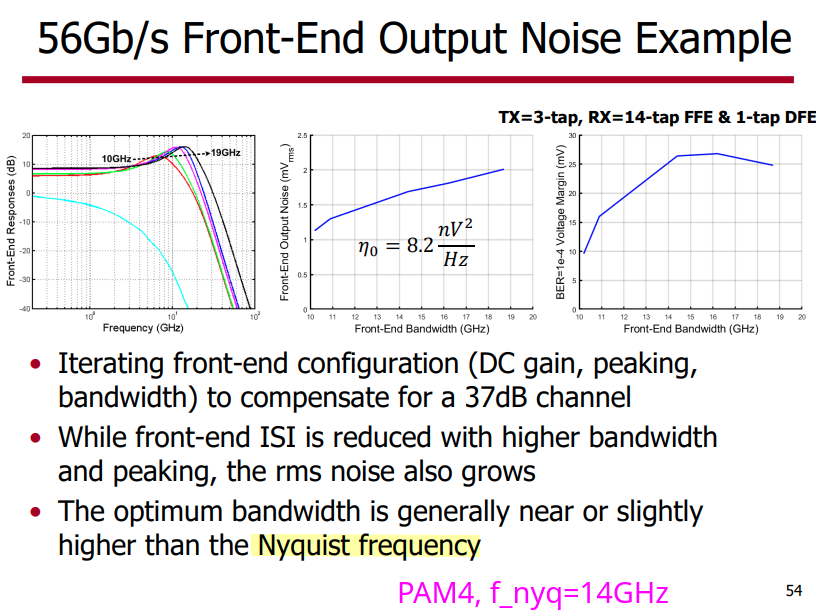
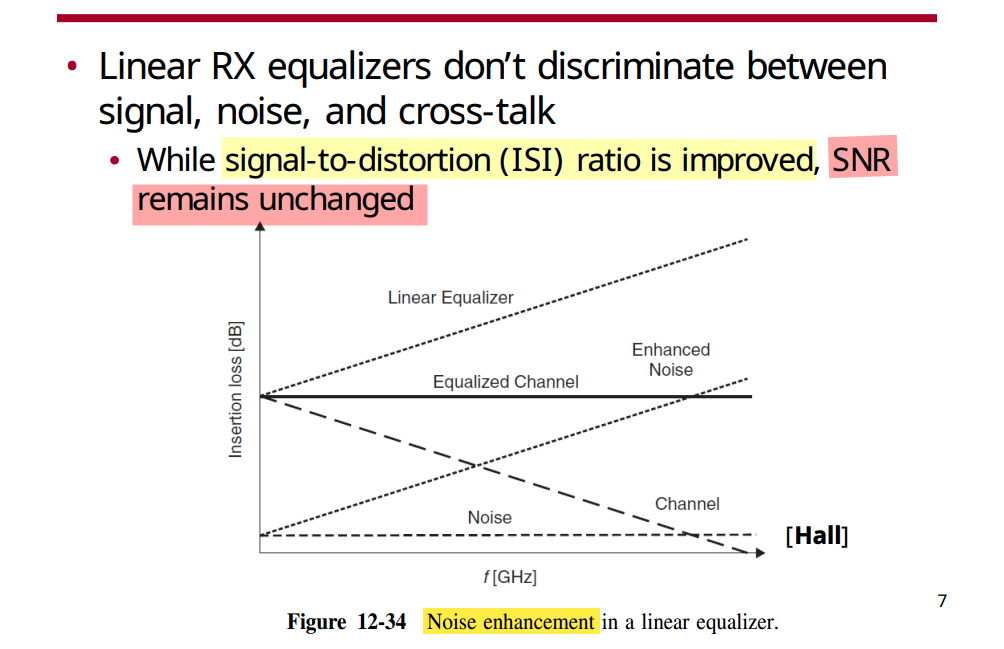
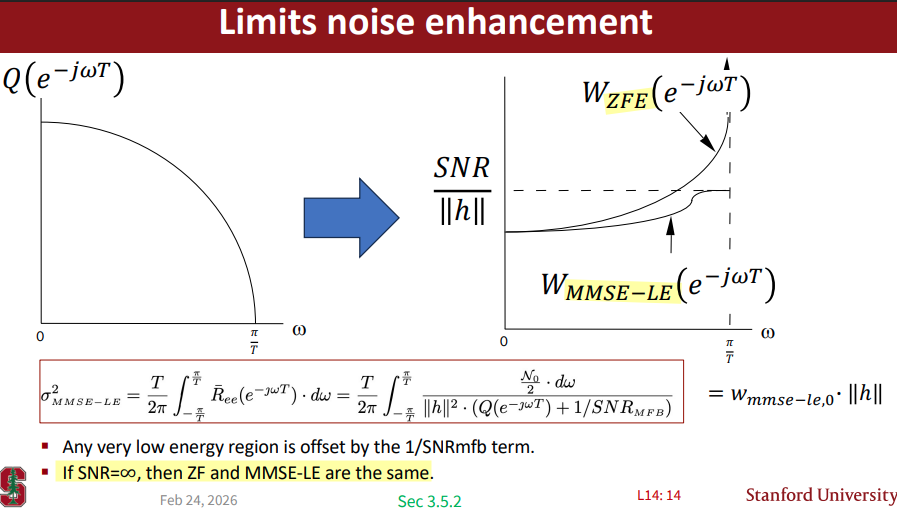
Equalization Noise
Enhancement
Advanced Signal Integrity for High-Speed Digital Designs, S. H. Hall
and H. L. Heck, John Wiley & Sons, 2009
trade-offs between noise amplification and signal
equalization
reference
J. Kim et al., "A 112Gb/s PAM-4 transmitter with 3-Tap FFE in 10nm
CMOS," 2018 IEEE International Solid-State Circuits Conference -
(ISSCC), San Francisco, CA, USA, 2018 [paper] [slides]
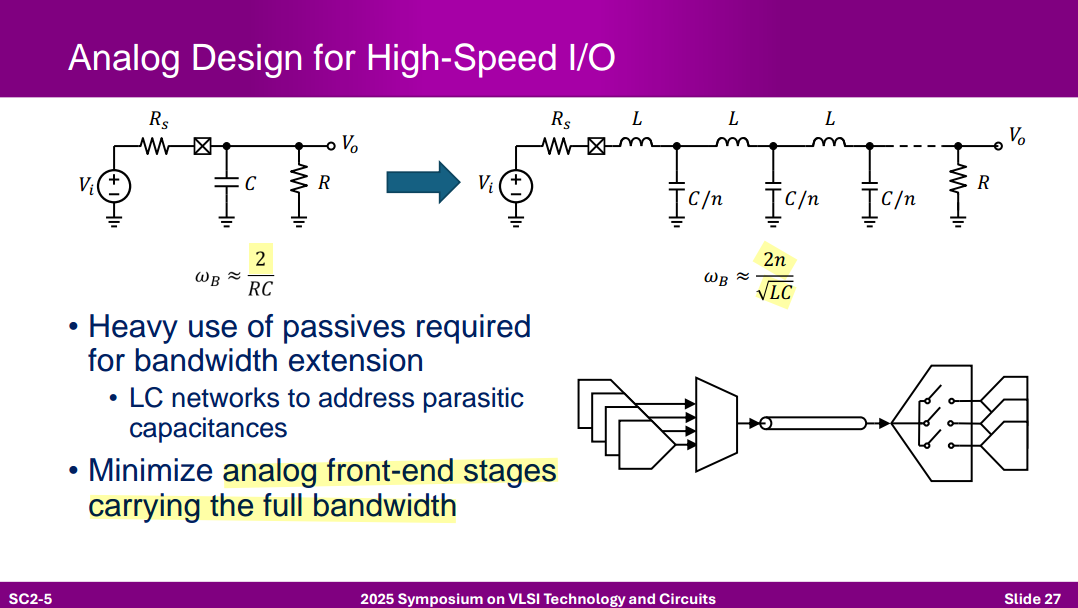
S. Shekhar, J. S. Walling and D. J. Allstot, "Bandwidth Extension
Techniques for CMOS Amplifiers," in IEEE Journal of Solid-State
Circuits, vol. 41, no. 11, pp. 2424-2439, Nov. 2006 [pdf]
S. S. Mohan, M. D. M. Hershenson, S. P. Boyd and T. H. Lee,
"Bandwidth extension in CMOS with optimized on-chip inductors," in IEEE
Journal of Solid-State Circuits, vol. 35, no. 3, pp. 346-355, March 2000
[http://smirc.stanford.edu/papers/JSSC00MAR-mohan.pdf]
J. Paramesh and D. J. Allstot, "Analysis of the Bridged T-Coil
Circuit Using the Extra-Element Theorem," in IEEE Transactions on
Circuits and Systems II: Express Briefs, vol. 53, no. 12, pp. 1408-1412,
Dec. 2006 [https://sci-hub.st/10.1109/TCSII.2006.885971]
S. C. D. Roy, "Comments on "Analysis of the Bridged T-coil Circuit
Using the Extra-Element Theorem," in IEEE Transactions on Circuits and
Systems II: Express Briefs, vol. 54, no. 8, pp. 673-674, Aug. 2007 [https://sci-hub.st/10.1109/TCSII.2007.899834]
Deog-Kyoon Jeong. Topics in IC Design: T-Coil [pdf]
P. Heydari, "Neutralization Techniques for High-Frequency Amplifiers:
An Overview," in IEEE Solid-State Circuits Magazine, vol. 9, no. 4, pp.
82-89, Fall 2017 [https://sci-hub.ru/10.1109/MSSC.2017.2745858]
—, "Evolution of Broadband Amplifier Design: From Single-Stage to
Distributed Topology," in IEEE Microwave Magazine, vol. 24, no. 9, pp.
18-29, Sept. 2023
Cowan G. Mixed-Signal CMOS for Wireline Communication:
Transistor-Level and System-Level Design Considerations. Cambridge
University Press; 2024
Starič, Peter and Erik Margan. Wideband amplifiers. (2006)
[pdf]
Walling, Jeffrey & Shekhar, Sudip & Allstot, David. (2008).
Wideband CMOS Amplifier Design: Time-Domain Considerations. Circuits and
Systems I: Regular Papers, IEEE Transactions on. 55. 1781 - 1793. [pdf]
A. A. Abidi, "The T-Coil Circuit Demystified," in IEEE Transactions
on Circuits and Systems I: Regular Papers, vol. 72, no. 9, pp.
4469-4480, Sept. 2025
S. Lin, D. Huang and S. Wong, "Pi Coil: A New Element for Bandwidth
Extension," in IEEE Transactions on Circuits and Systems II: Express
Briefs, vol. 56, no. 6, pp. 454-458, June 2009
M. Kossel et al., "A T-Coil-Enhanced 8.5 Gb/s High-Swing SST
Transmitter in 65 nm Bulk CMOS With <−16 dB Return Loss Over 10 GHz
Bandwidth," in IEEE Journal of Solid-State Circuits, vol. 43,
no. 12, pp. 2905-2920, Dec. 2008 [https://web.mit.edu/magic/Public/papers/04684644.pdf]
S. Galal and B. Razavi, "Broadband ESD protection circuits in CMOS
technology," in IEEE Journal of Solid-State Circuits, vol. 38, no. 12,
pp. 2334-2340, Dec. 2003, [https://sci-hub.jp/10.1109/JSSC.2003.818568]
M. Ker and Y. Hsiao, "On-Chip ESD Protection Strategies for RF
Circuits in CMOS Technology," 2006 8th International Conference on
Solid-State and Integrated Circuit Technology Proceedings, 2006, pp.
1680-1683 [https://sci-hub.jp/10.1109/ICSICT.2006.306371]
M. Ker, C. Lin and Y. Hsiao, "Overview on ESD Protection Designs of
Low-Parasitic Capacitance for RF ICs in CMOS Technologies," in IEEE
Transactions on Device and Materials Reliability, vol. 11, no. 2, pp.
207-218, June 2011 [https://sci-hub.jp/10.1109/TDMR.2011.2106129]
Minsoo Choi et al., "An Approximate Closed-Form Channel Model for
Diverse Interconnect Applications," IEEE Transactions on Circuits and
Systems-I: Regular Papers, vol. 61, no. 10, pp. 3034-3043, Oct. 2014.
[https://sci-hub.jp/10.1109/TCSI.2014.2327275]
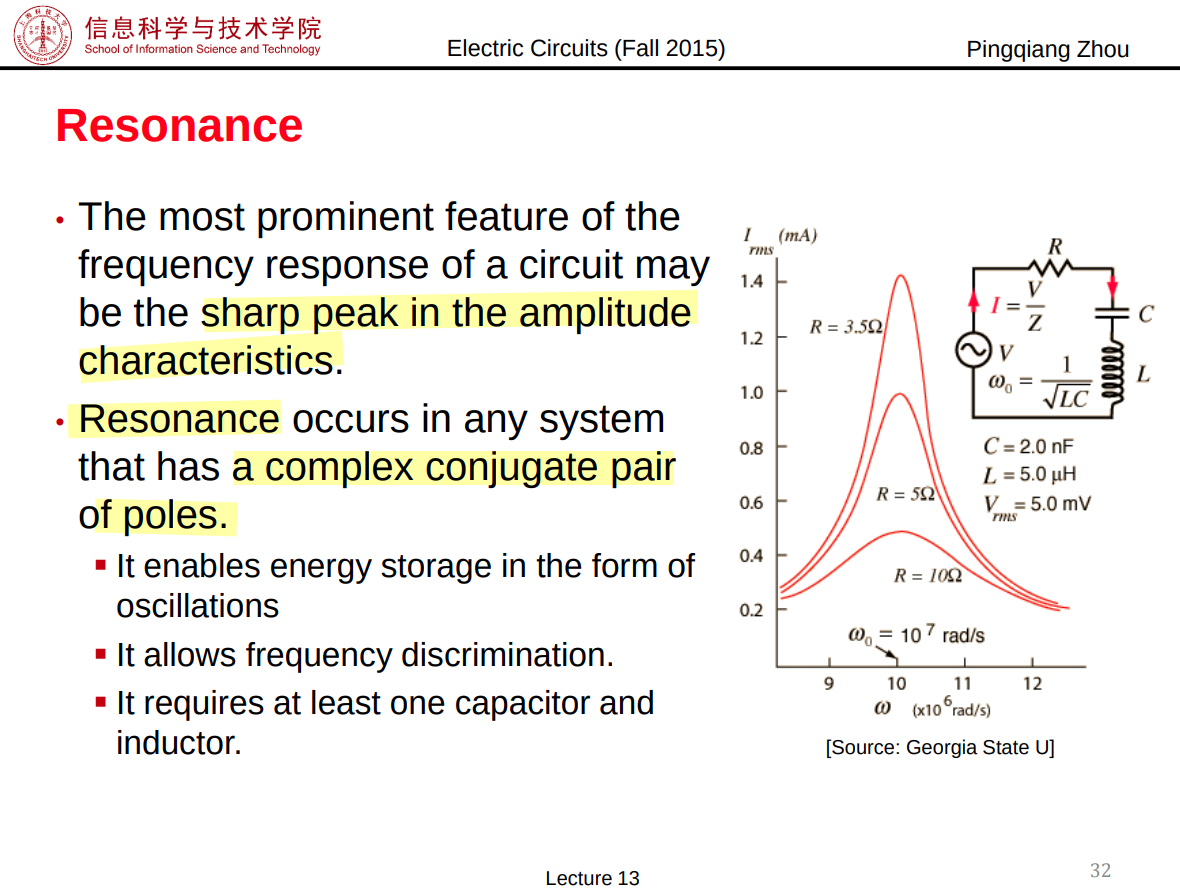
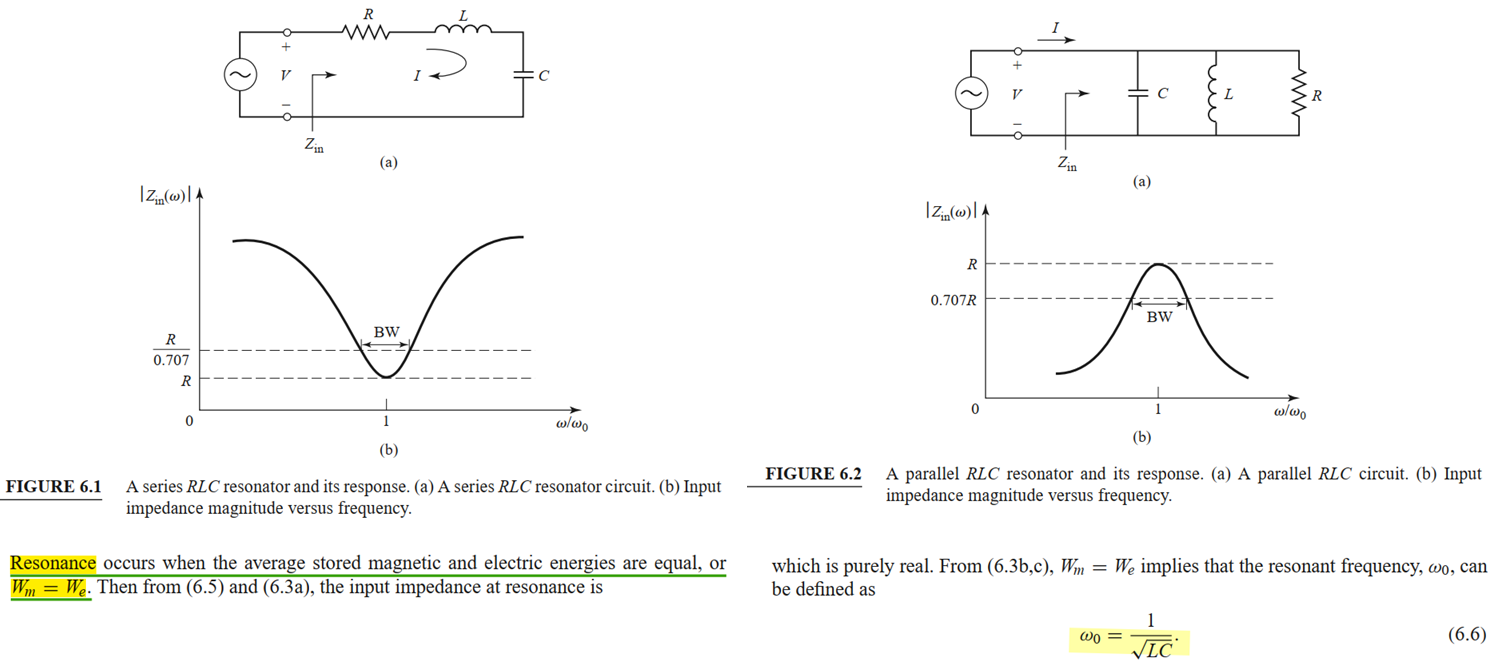
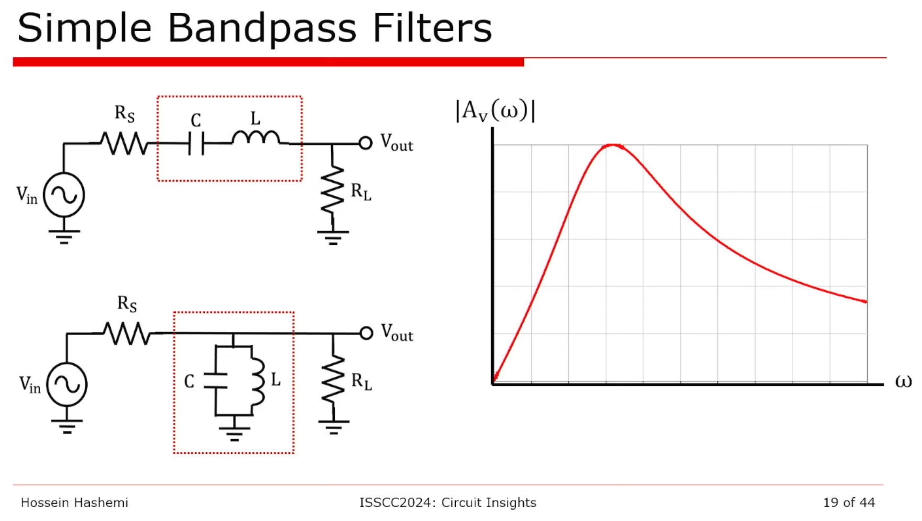
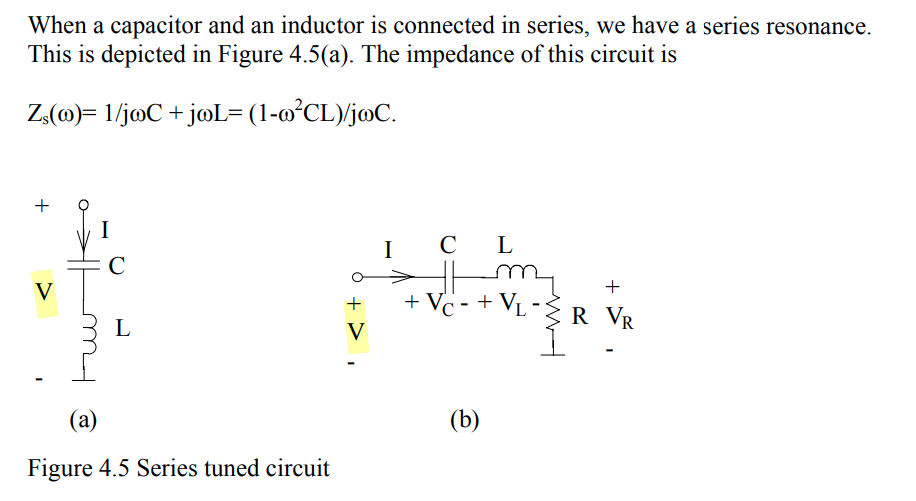
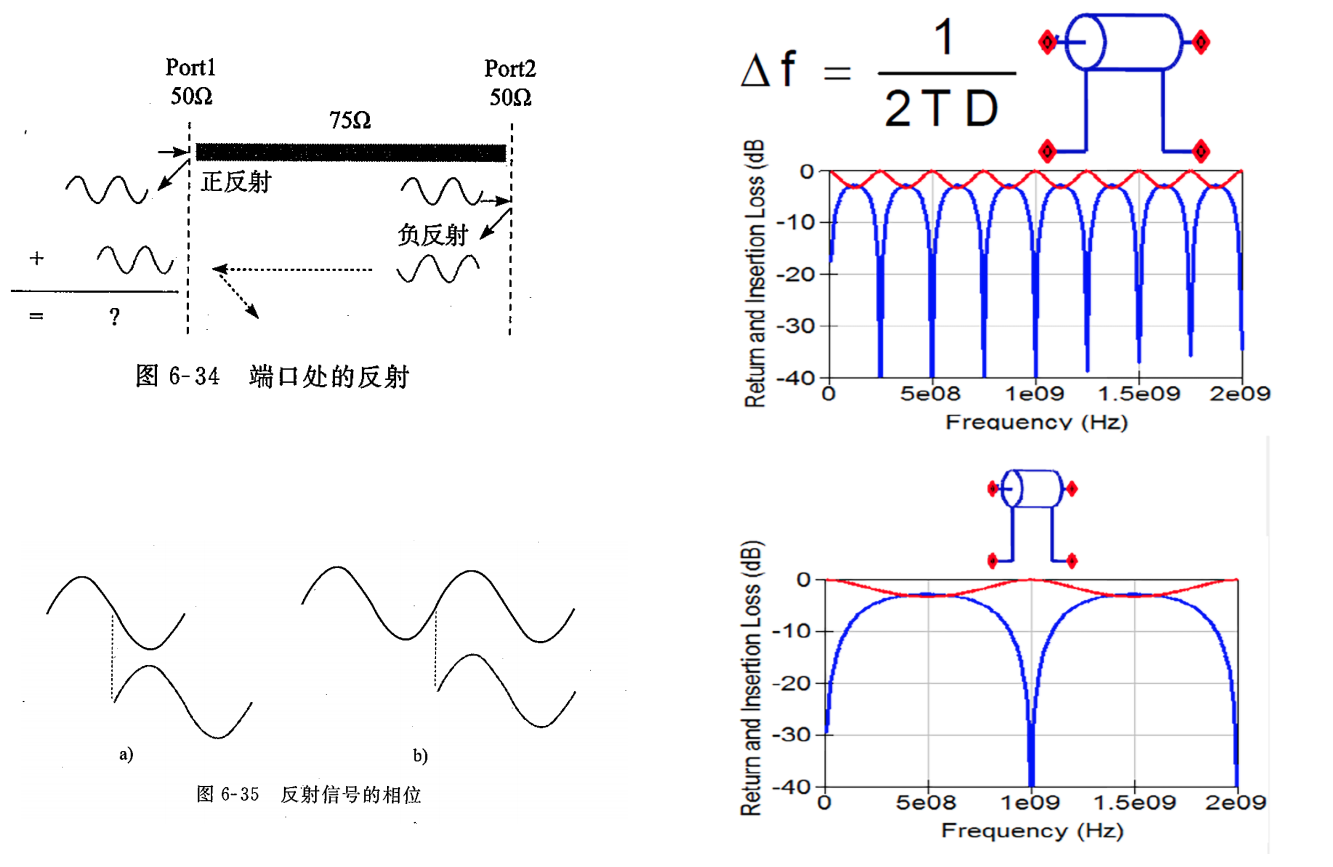
A resonant circuit refers to an electrical
circuit using circuit elements such as an inductor (L) and a capacitor
(C) to cause resonance at a specific frequency.
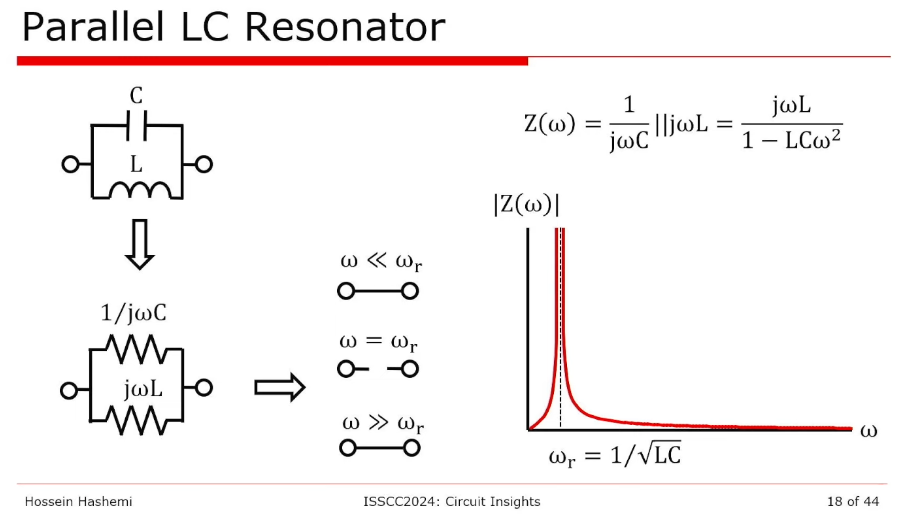
There are two types of resonant circuits:
series resonant circuits
parallel resonant circuits
In a series resonant circuit, the impedance of the
circuit reaches its minimum value at resonance, whereas
in a parallel resonant circuit, the impedance reaches
its maximum value
antiresonance
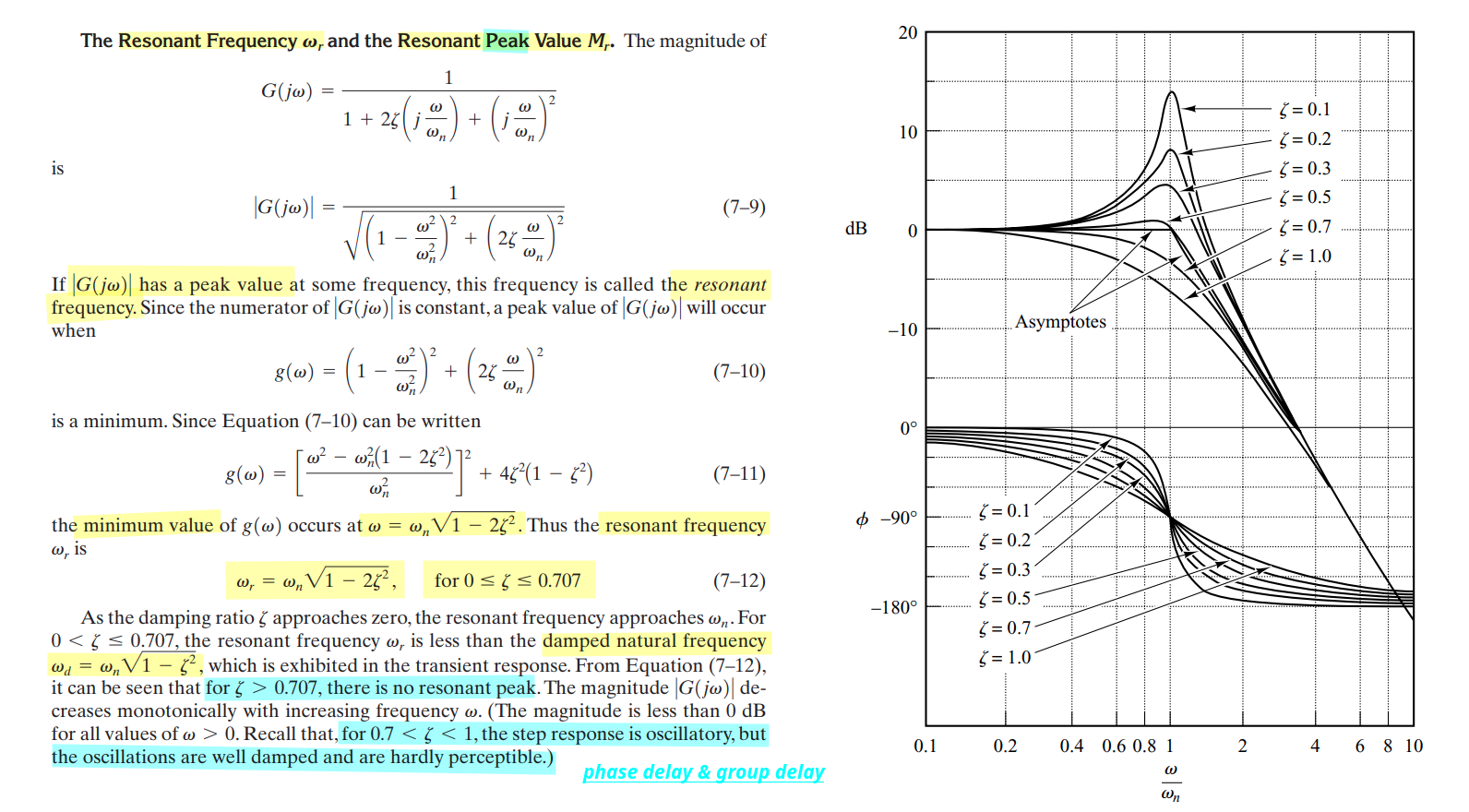
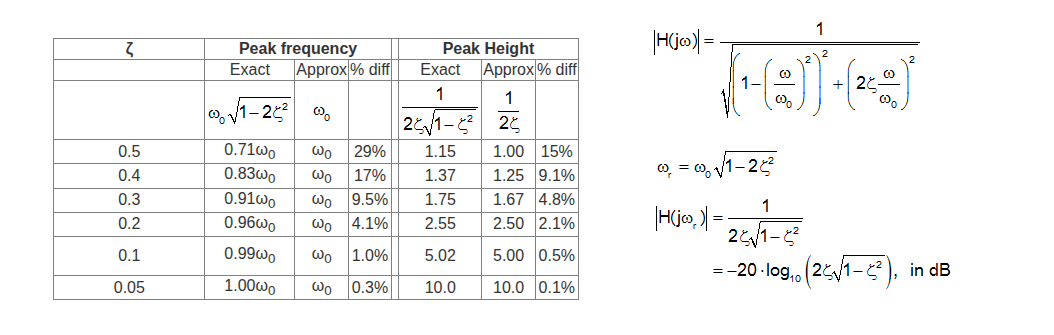
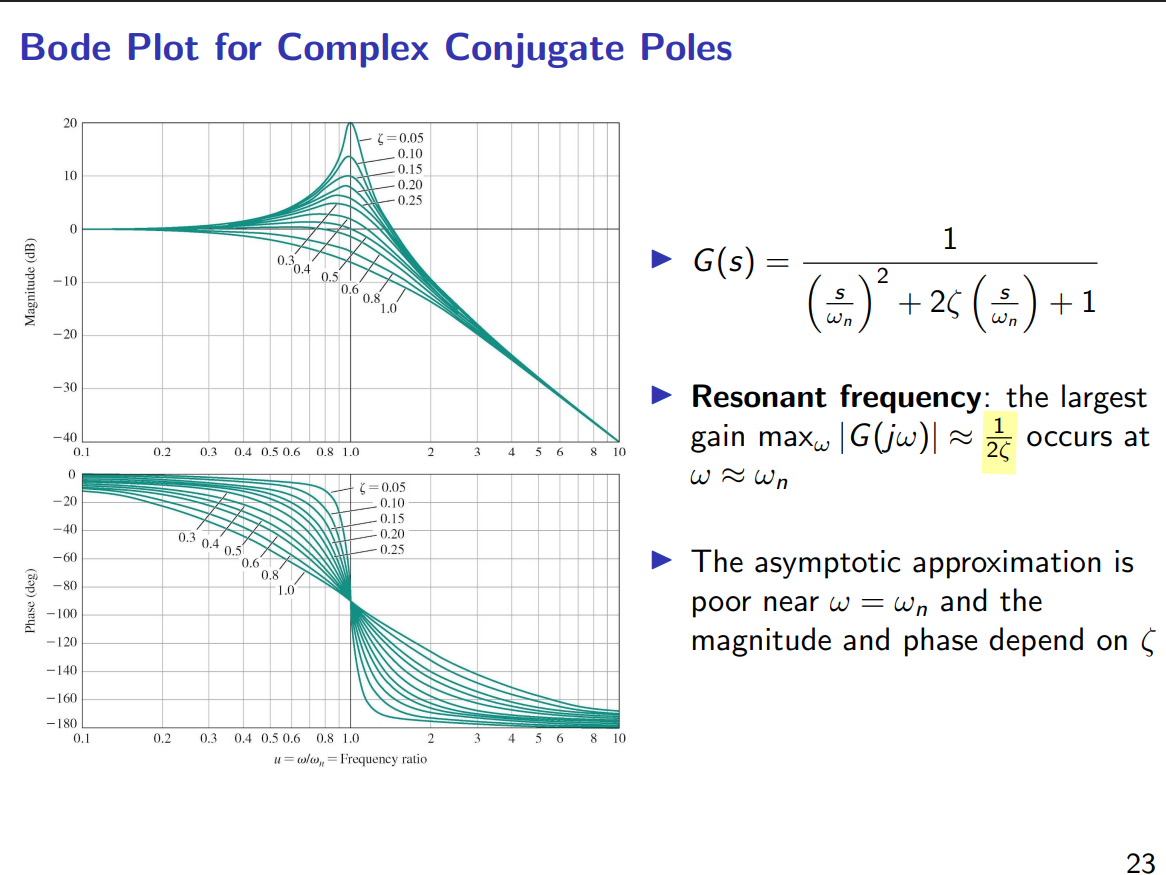
Resonant Frequency
\(\zeta \lt 1\):
Complex-Conjugate Poles, but not resonant
peak
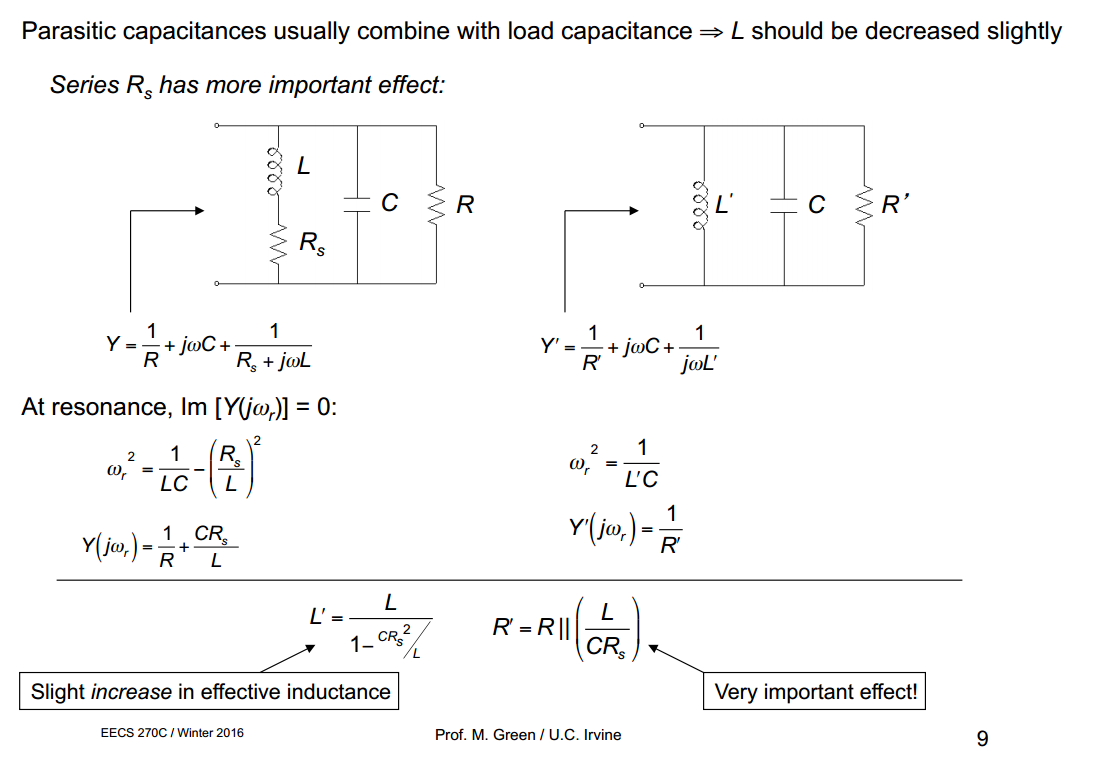
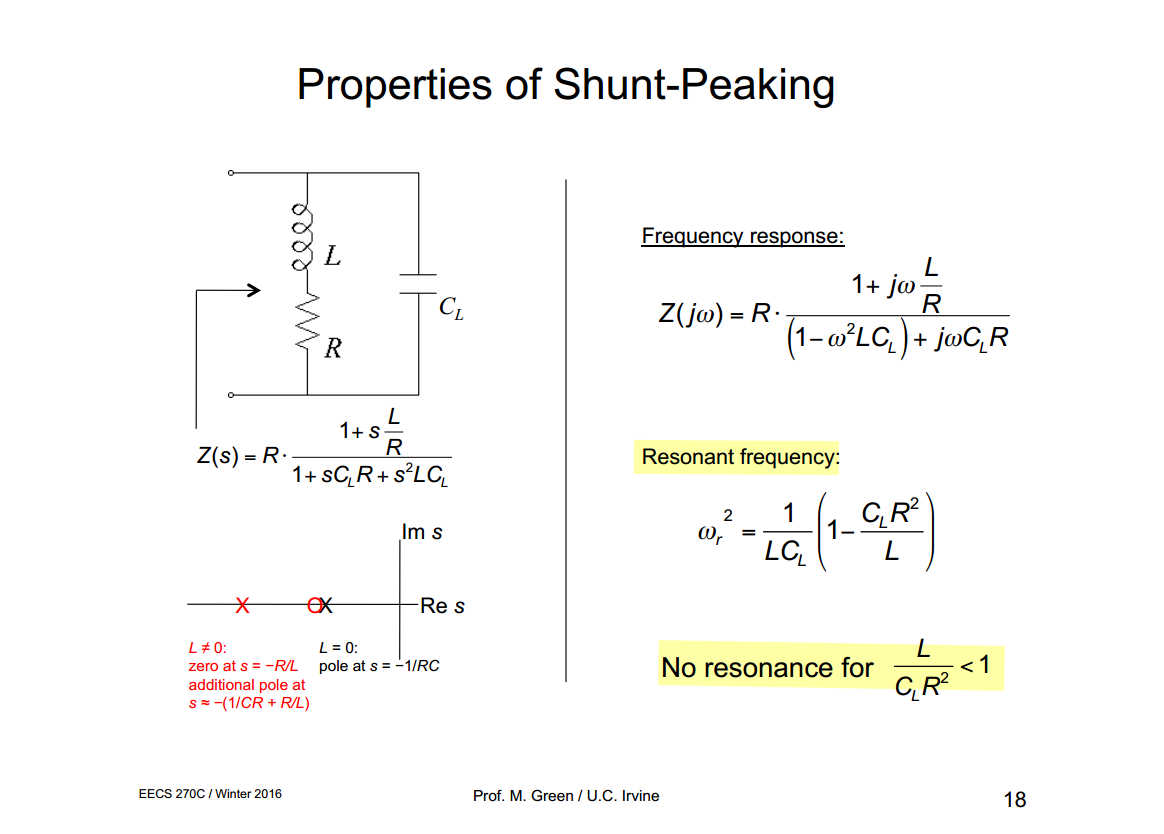
Prof. M. Green / U.C. Irvine EECS 270C / Winter 2016 Week5 [pdf]
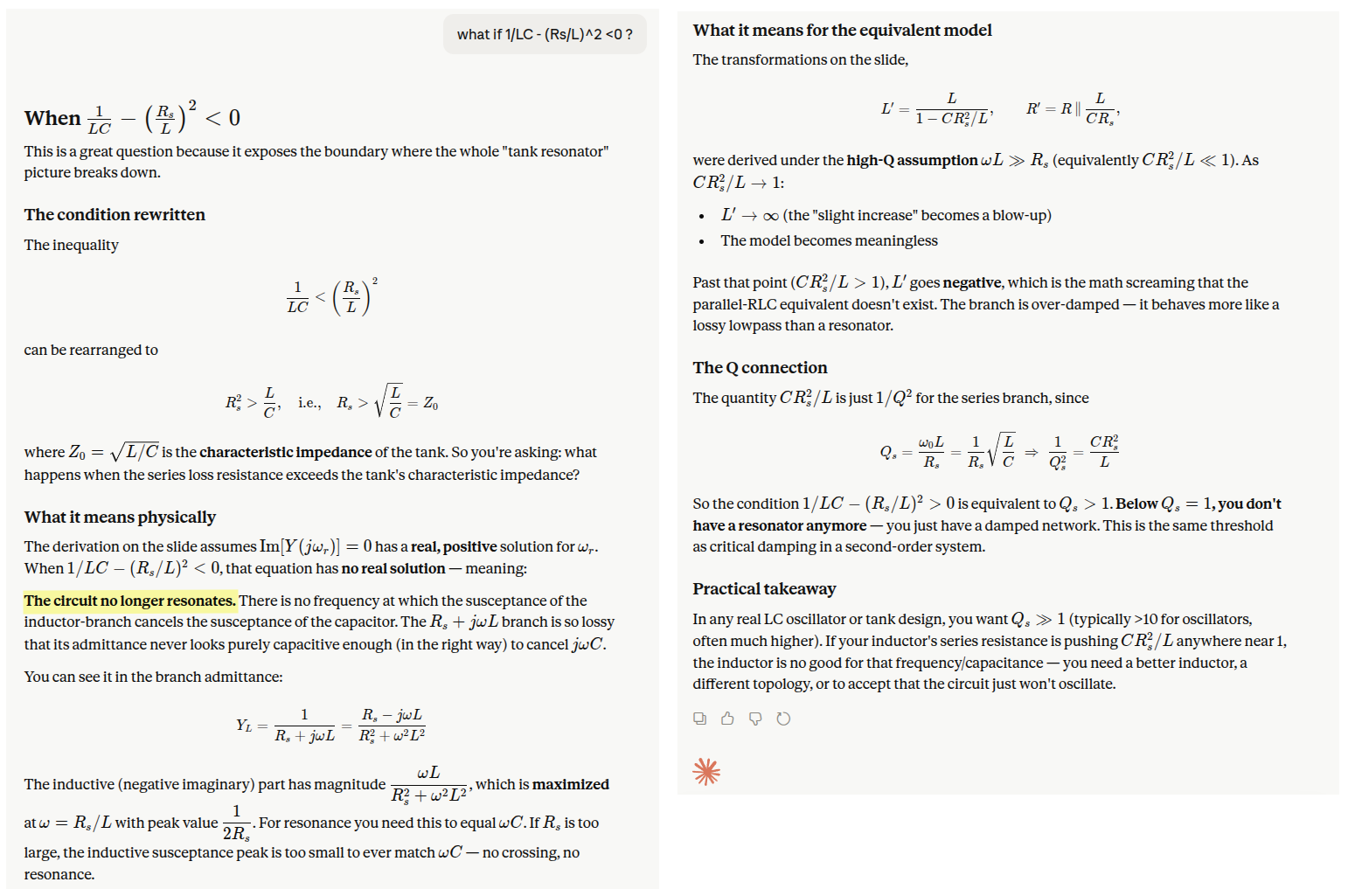
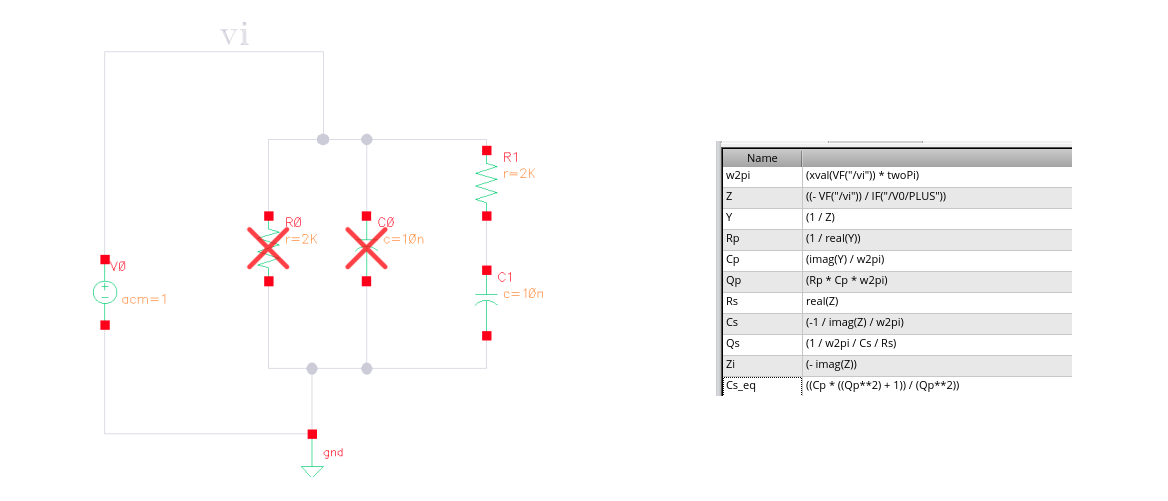
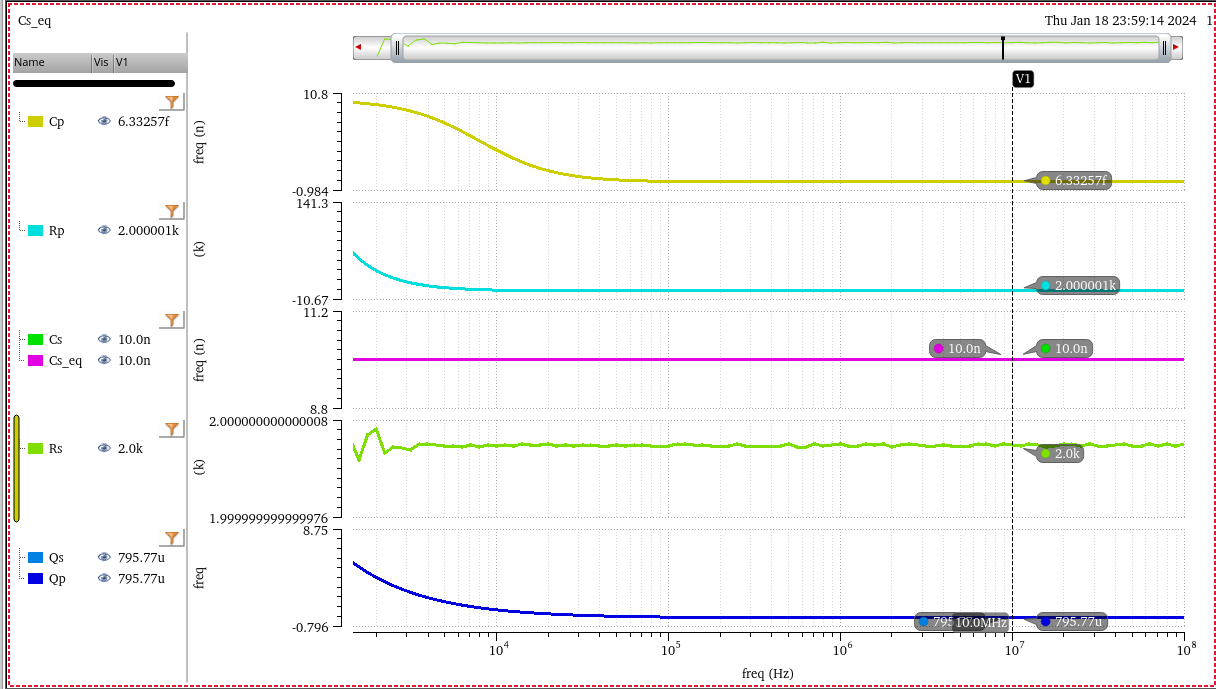
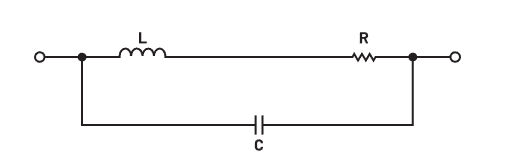
with \(L' = \frac{L}{1 -
CR_s^2/L}\)
resonant frequency in right equivalent circuit \[
\omega_r^2 = \frac{1}{L'C} = \frac{1}{LC} -
\left(\frac{R_s}{L}\right)^2
\] which shows that the equivalent circuit preserves the resonant
frequency of the original network.
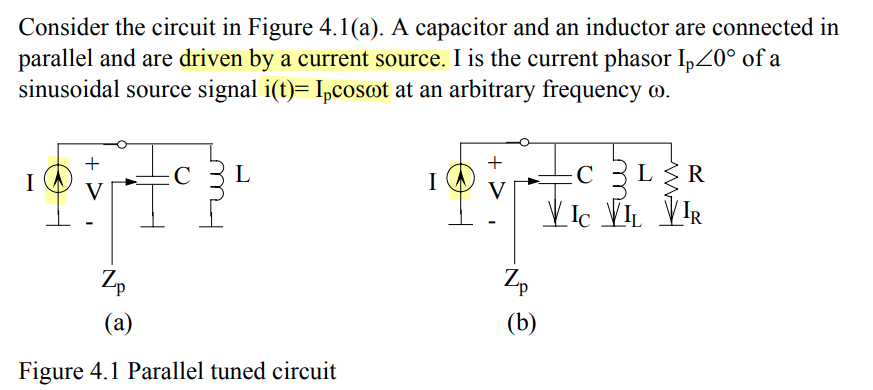
assuming \(i(t) = I_p\cos\omega_0
t\), where \(\omega_0
=1/\sqrt{LC}\) , suppose all current flow into \(R\)\[
V(t) = I_pR\cdot \cos\omega_0 t
\]\(I_C\), the current flow
through \(C\)\[
\color{red}I_C(t)=C\frac{\mathrm{d}V(t)}{\mathrm{d}t}=-C\omega_0\cdot
I_pR\cdot \sin\omega_0 t
\] Then, we have voltage between \(L\), given \(I_L
= -I_C\)\[
V_L(t) = L\frac{\mathrm{d}I_L(t)}{\mathrm{d}t} = LC\omega_0^2\cdot
I_pR\cdot \cos\omega_0 t = I_pR\cdot \cos\omega_0 t
\]
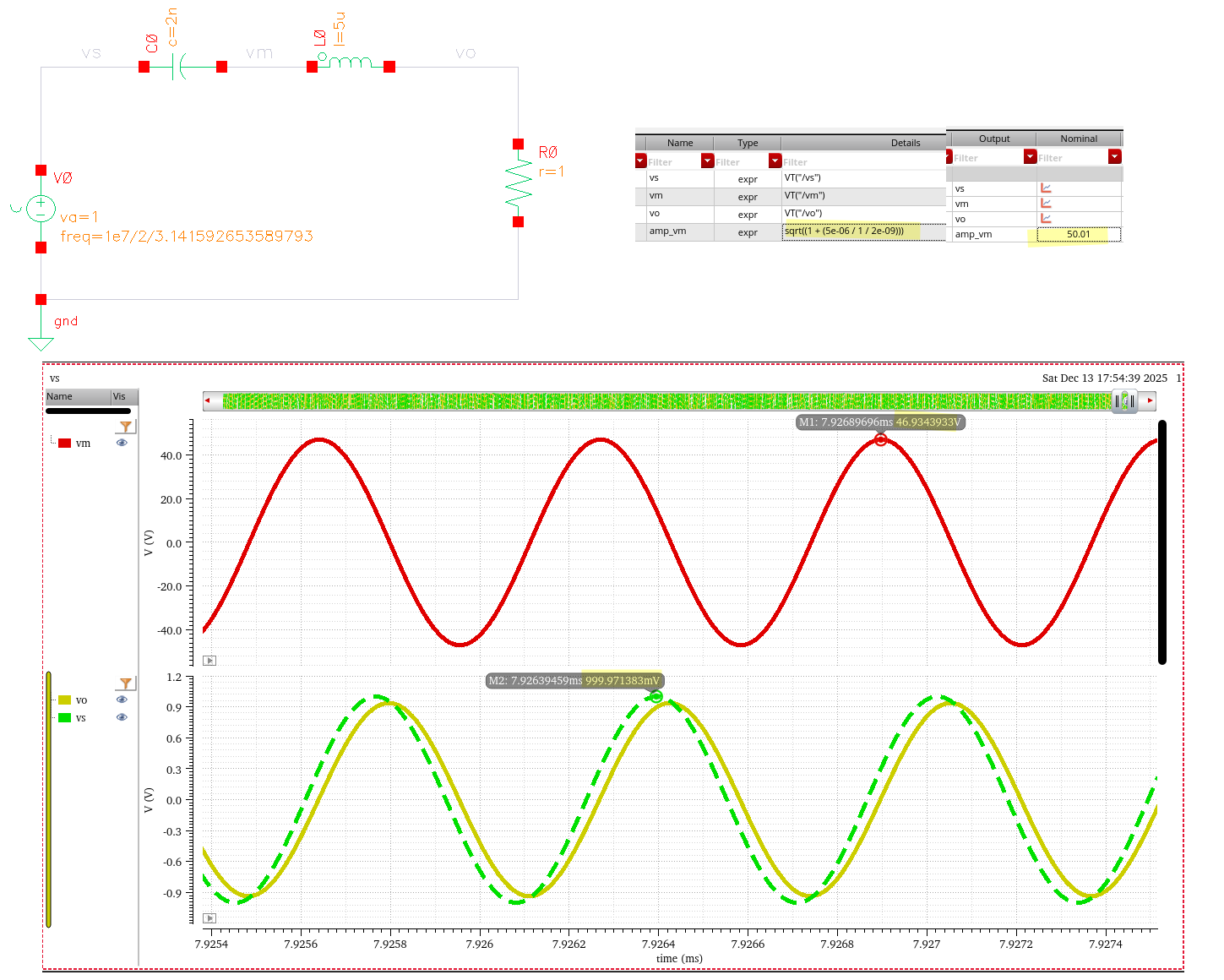
Series resonance
assuming \(V(t)=V_s\cos\omega_0t\),
where \(\omega_0 =1/\sqrt{LC}\) ,
suppose all current flow into \(V_C+V_L=0\)\[
V_R(t) = V(t) = V_s\cos\omega_0t
\] then \[
I_s(t) = \frac{V_s}{R}\cos\omega_0 t
\]\(V_L(t)\) is obtained \[
V_L(t) = L\frac{\mathrm{d}I_s(t)}{\mathrm{d}t} = -L\omega_0\cdot
\frac{V_s}{R}\sin\omega_0 t
\] Then \[
V_C(t) = V(t) - (V_L(t) + V_R(t)) = -V_L(t)
\] Therefore, \(I_C\) current
flow through \(C\)\[
I_C(t) = C\frac{\mathrm{d}V_C(t)}{\mathrm{d}t}= LC\omega_0^2\cdot
\frac{V_s}{R}\cos\omega_0 t= \frac{V_s}{R}\cos\omega_0 t
\] voltage potential between \(L\) and \(C\)\[
\color{red}V_m(t) = V_R(t) + V_L(t) = V_s\cos\omega_0t -L\omega_0\cdot
\frac{V_s}{R}\sin\omega_0 t = V_s\sqrt{1+L/R^2C}\cos(\omega_0t+\phi)
\]
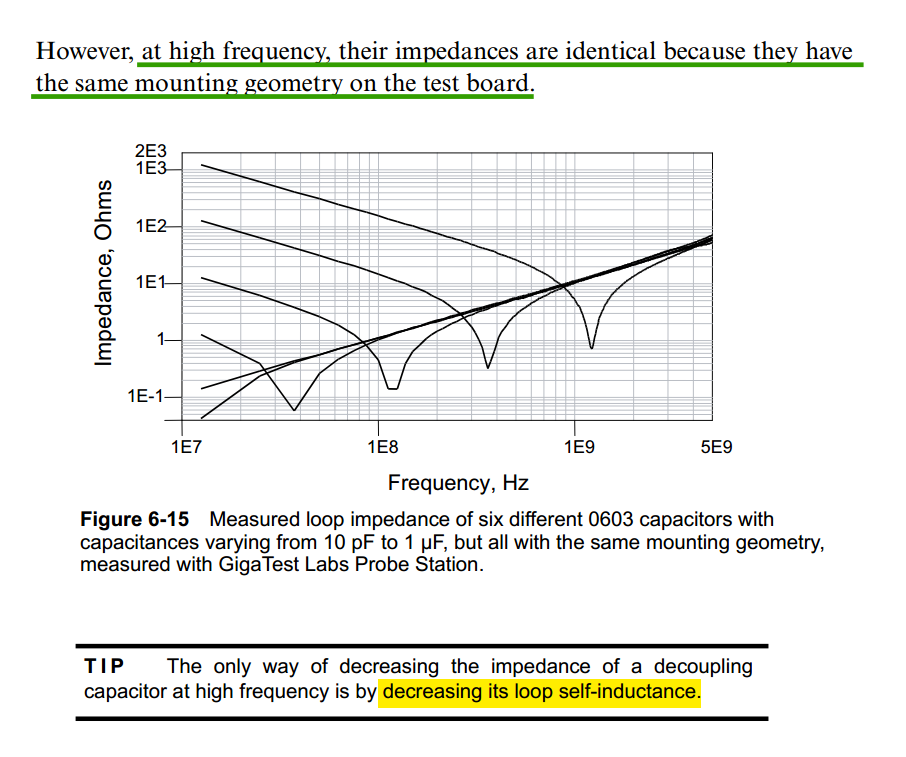
\[
f_\text{SRF} = \frac{1}{2\pi \sqrt{LC}}
\] The SRF of an inductor is the frequency at which the parasitic
capacitance of the inductor resonates with the ideal inductance of the
inductor, resulting in an extremely high impedance. The inductance only
acts like an inductor below its SRF
For choking applications, chose an inductor
whose SRF is at or near the frequency to be attenuated
For other applications, the SRF should be at least
10 times higher than the operating frequency
it is more important to have a relatively flat inductance
curve (constant inductance vs. frequency) near the required
frequency
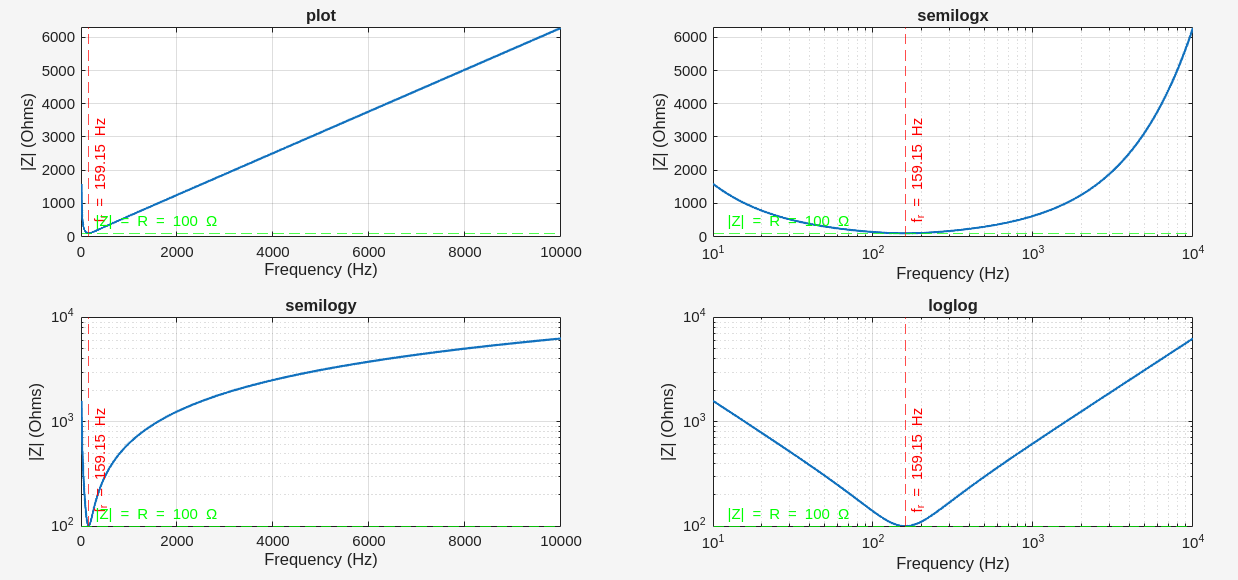
RLC inspection
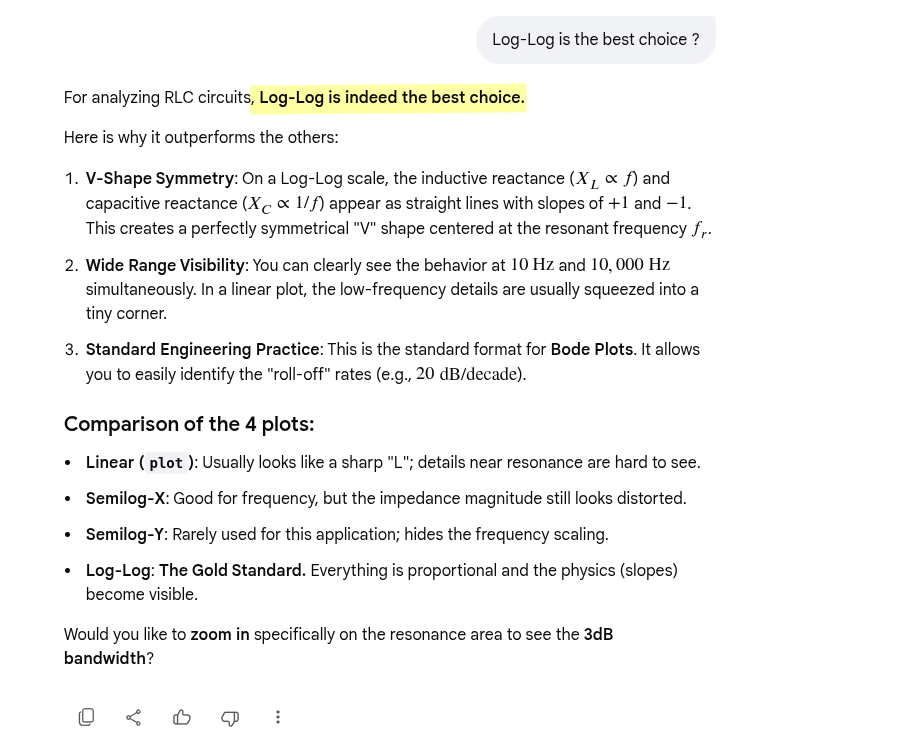
For analyzing RLC circuits, Log-Log is indeed the best
choice.
J. Nako, G. Tsirimokou, C. Psychalinos and A. S. Elwakil,
"Approximation of First–Order Complex Resonators in the
Frequency–Domain," in IEEE Access, vol. 13, pp. 54494-54503,
2025 [pdf]
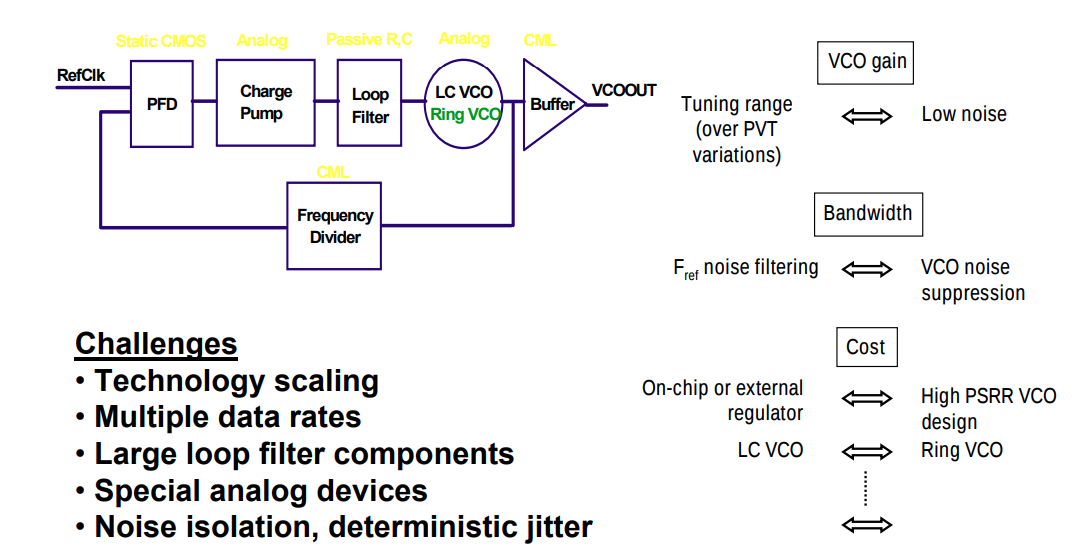
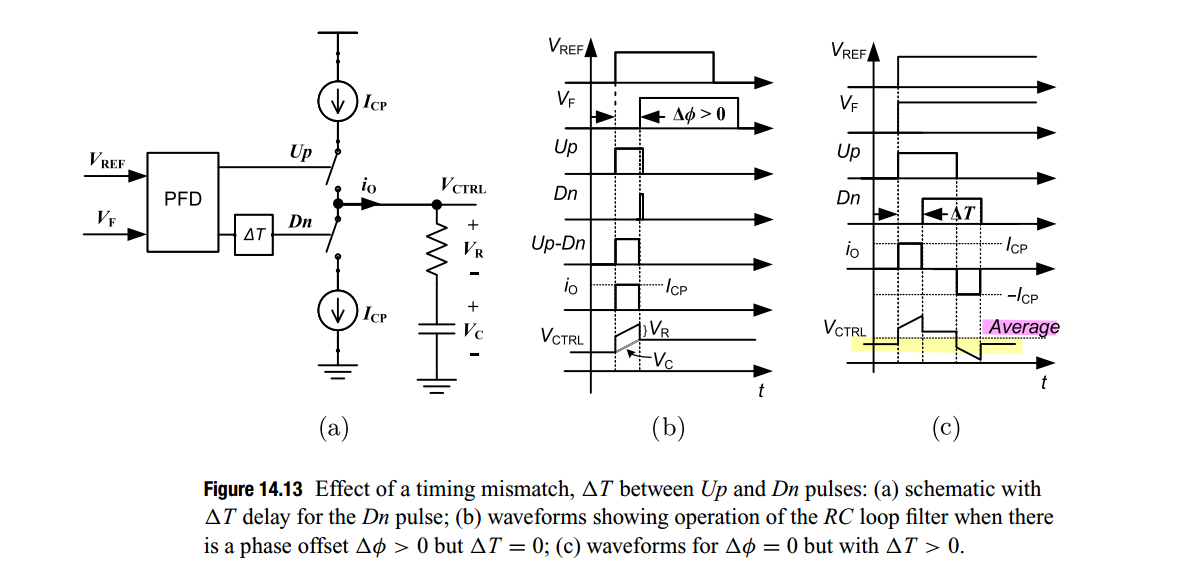
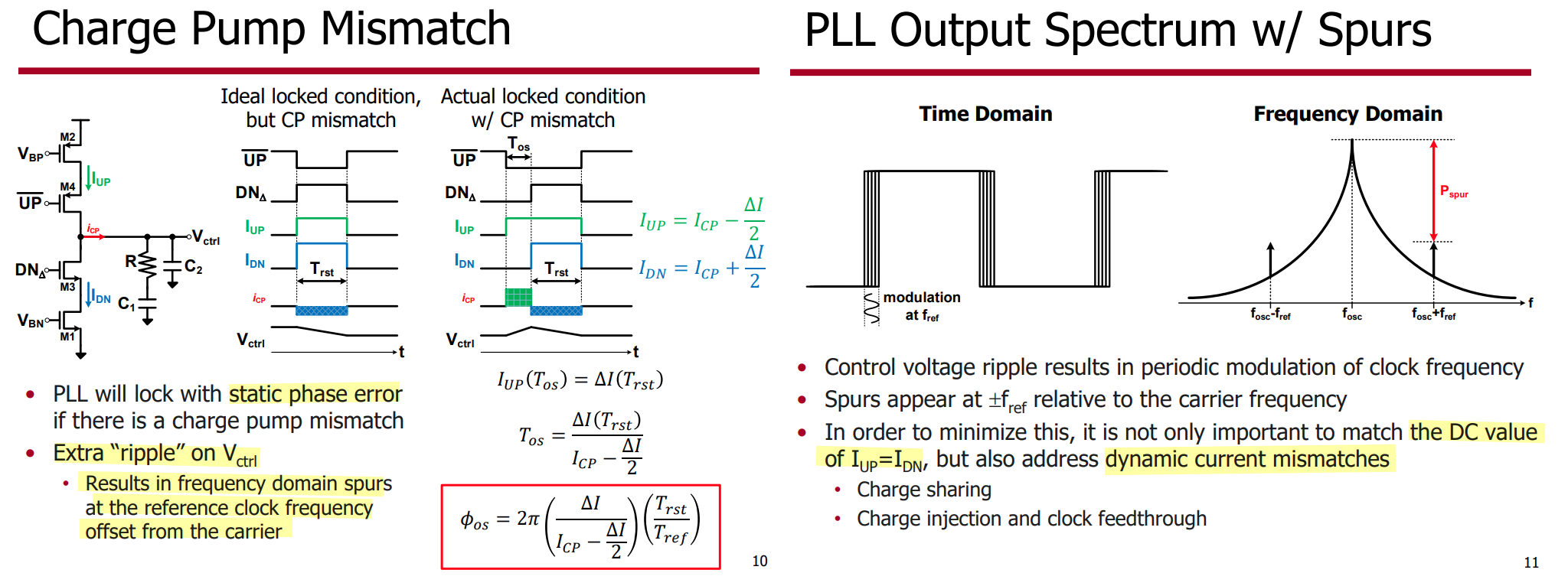
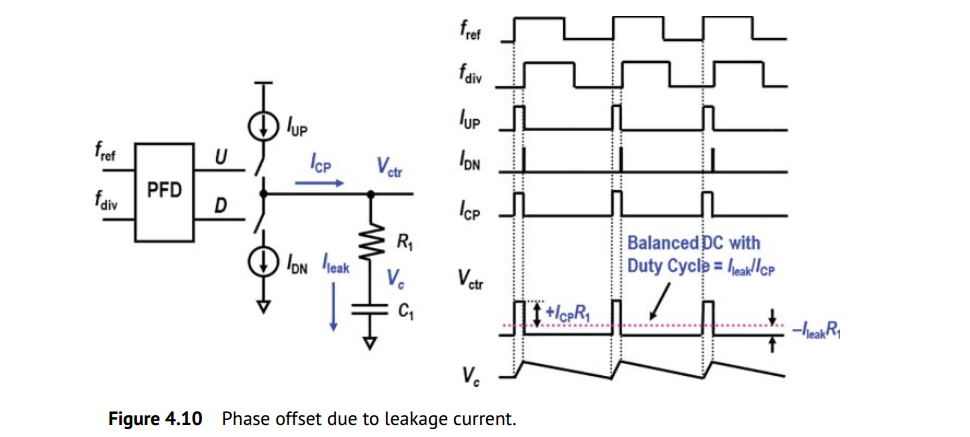
The periodic signal on VCTRL modulates the
VCO, giving rise to deterministic jitter
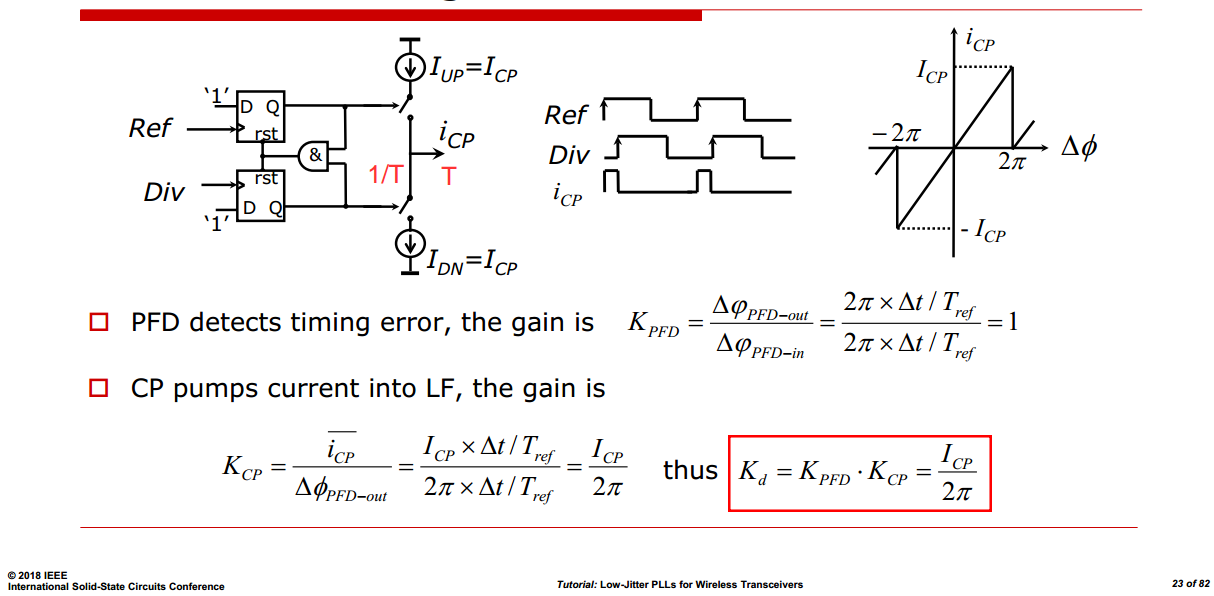
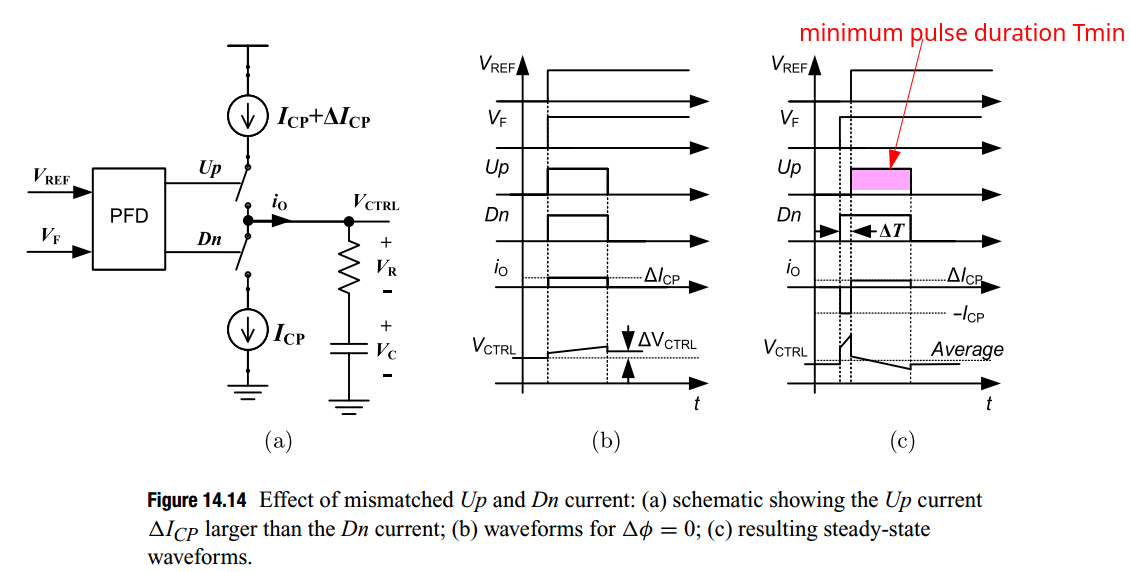
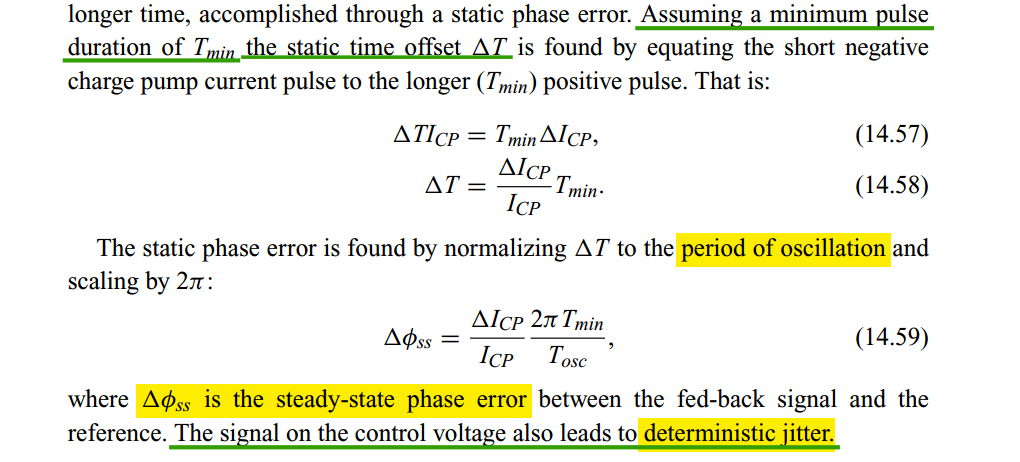
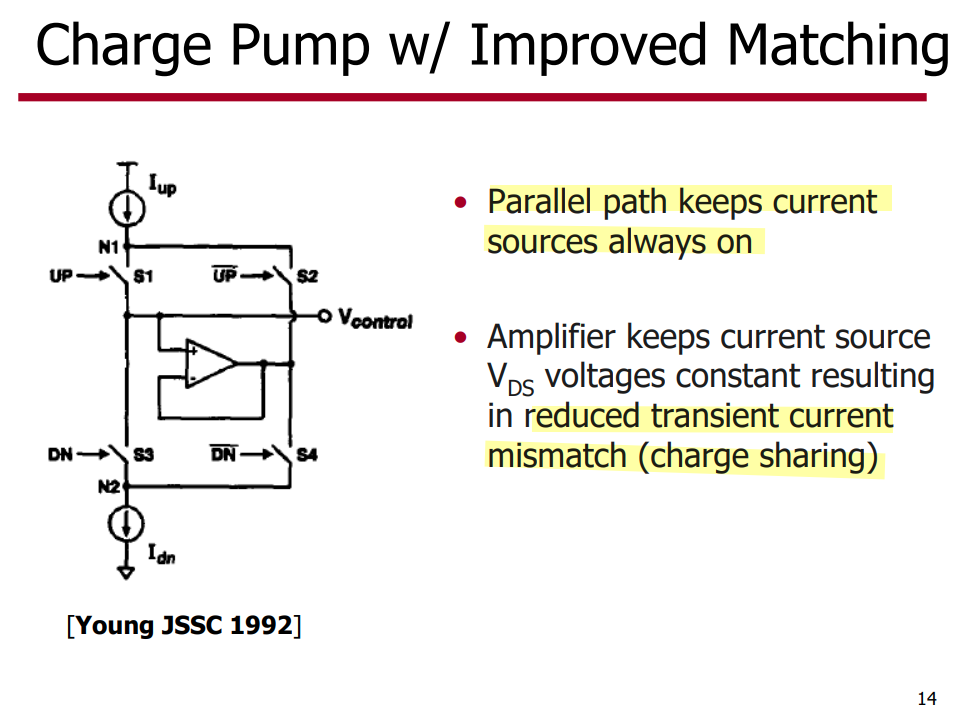
Timing Offsets Between Up and Dn Pulses
Mismatch Between Charge-Pump Current Sources
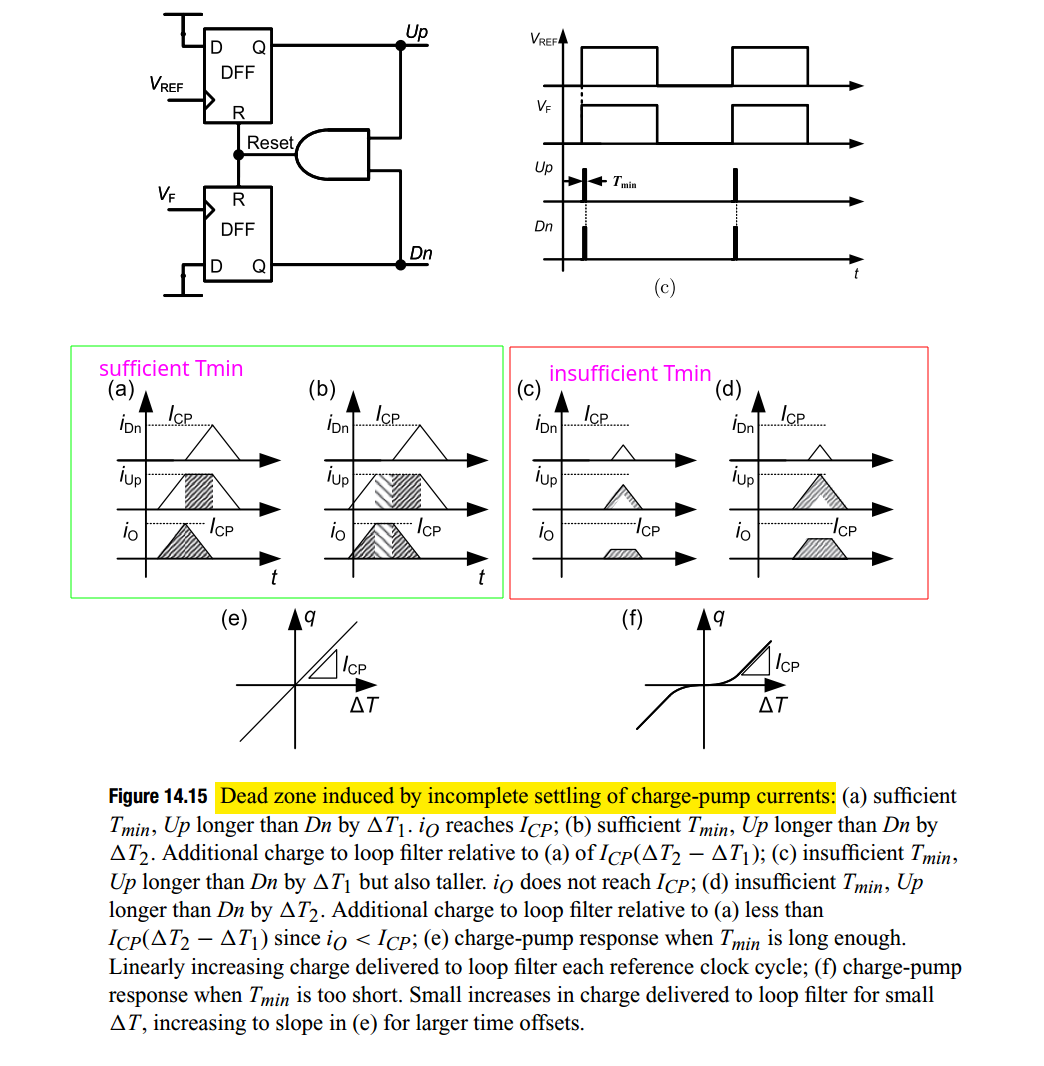
Incomplete Settling of Charge-Pump Currents
Finite Output Resistance of the Charge Pump
Up/Dn Timing Offset
If Dn pulse arrives \(\Delta T\)
after the Up pulse, the steady-state VCTRL will be slightly
lower than it would be without the \(\Delta T\) mismatch so as to return the
VCO's phase to match the reference clocks.
Vice versa, if If Up pulse arrives \(\Delta
T\) after the Dn pulse, the steady-state VCTRL will be slightly
higher than without \(\Delta
T\) mismatch
Johnson, M., Hudson, E.: A variable delay line PLL for
CPU-coprocessor synchronization. IEEE Journal of Solid-State Circuits
23(10), 1218–1223 (1988) [https://sci-hub.se/10.1109/4.5947]
W. Rhee, "Design of high-performance CMOS charge pumps in
phase-locked loops," 1999 IEEE International Symposium on Circuits
and Systems (ISCAS), Orlando, FL, USA, 1999, pp. 545-548 vol.2 [pdf]
Cowan G. Mixed-Signal CMOS for Wireline Communication:
Transistor-Level and System-Level Design Considerations. Cambridge
University Press; 2024
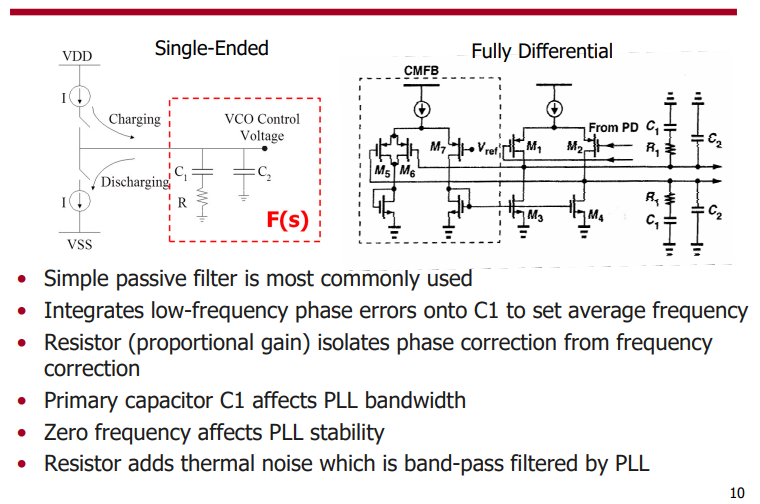
2nd loop filter
PI (proportional - integral) Loop Filter
PFD Deadzone
Dead zone induced by incomplete settling of charge-pump
currents
This situation can be avoided by adding additional delay to the
AND gate in the PFD
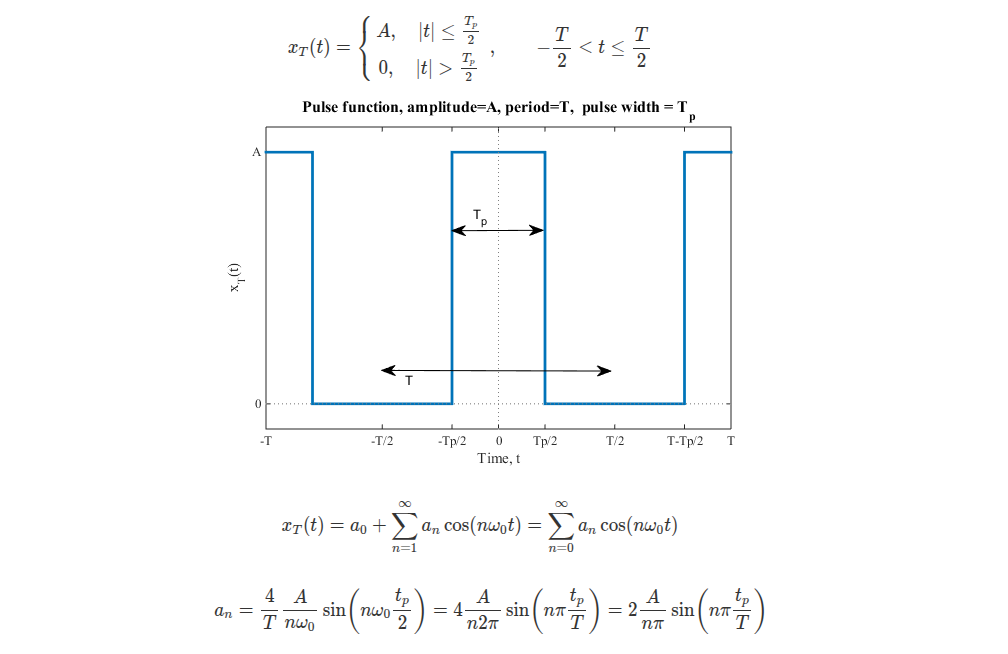
For the sake of simplicity, \(V_{ctr}\) looks like a rectangular pulse
with an amplitude of \(I_{CP}R_1\) and
a duty ratio of (\(I_{leak}/I_{CP}\)),
whose first coefficient of Fourier series is
where \(I_\text{leak} \ll I_{CP}\)
is assumed
Then, the peak frequency deviation \(\Delta f\)\[
\Delta f = a_1 \cdot K_v = 2I_\text{leak}R_1 K_v
\] using narrowband FM approximation, we have \[
P_\text{spur} = 20\log\left(\frac{\Delta f}{2f_\text{ref}}\right) =
20\log\left(\frac{I_\text{leak}R_1 K_v}{f_\text{ref}}\right)
\]
W. Rhee, "Design of high-performance CMOS charge pumps in
phase-locked loops," 1999 IEEE International Symposium on Circuits
and Systems (ISCAS), Orlando, FL, USA, 1999, pp. 545-548 vol.2 [pdf]
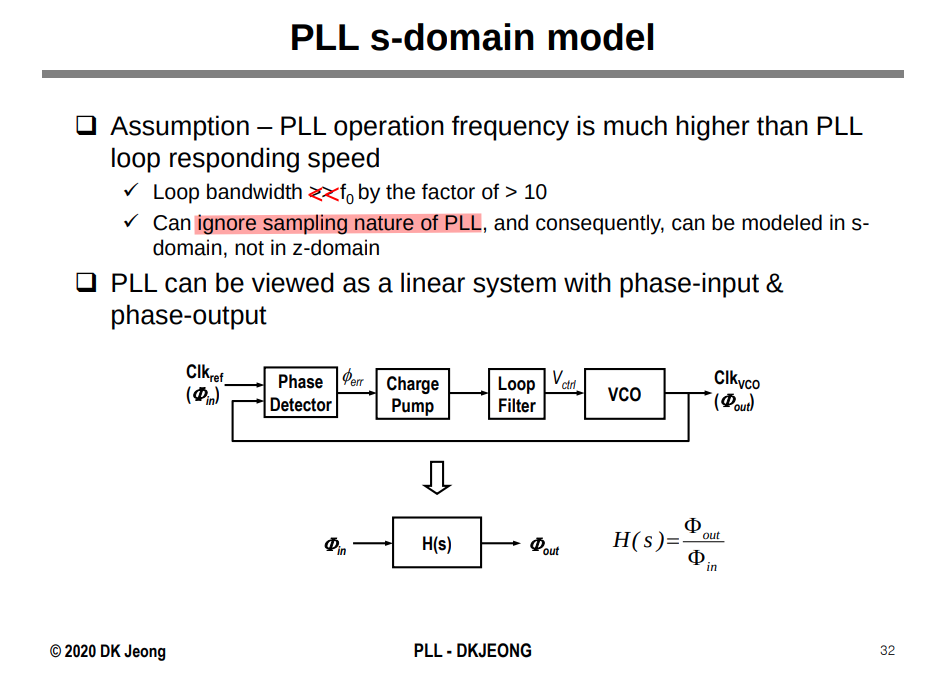
—. Yu, Z., 2024. Phase-Locked Loops: System Perspectives and
Circuit Design Aspects. John Wiley & Sons
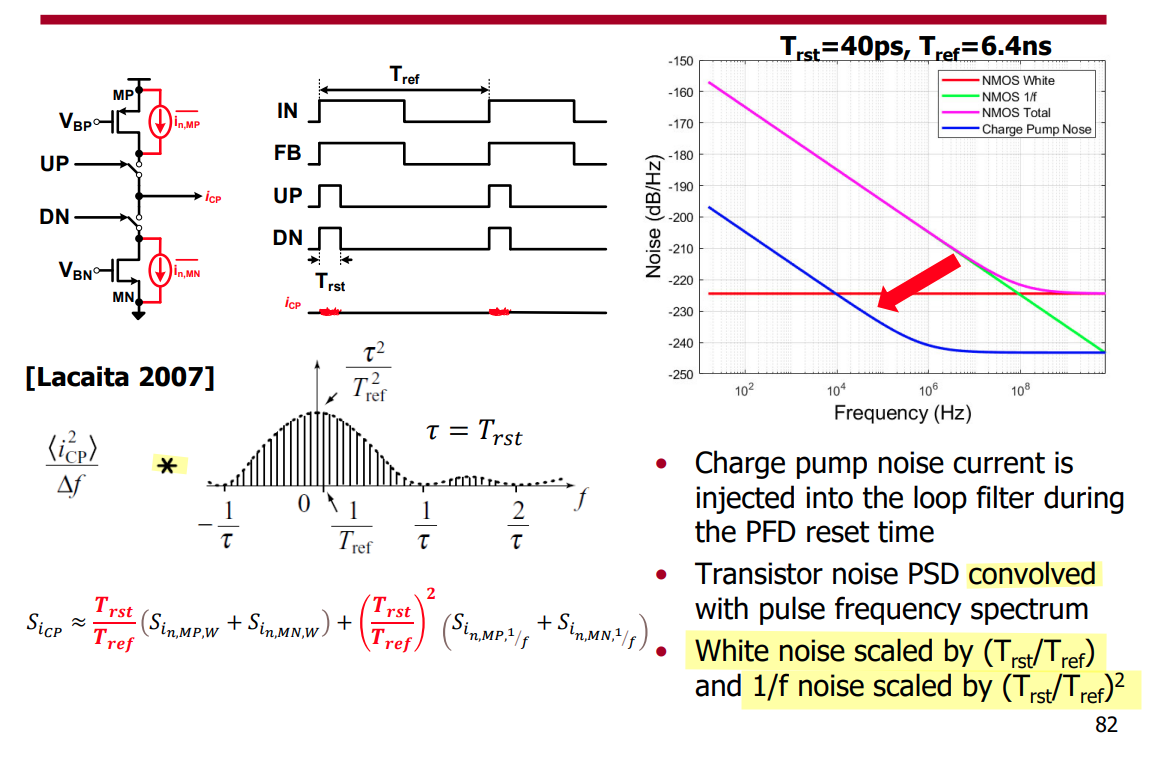
Lacaita, Andrea Leonardo, Salvatore Levantino, and Carlo Samori.
Integrated frequency synthesizers for wireless systems.
Cambridge University Press, 2007.
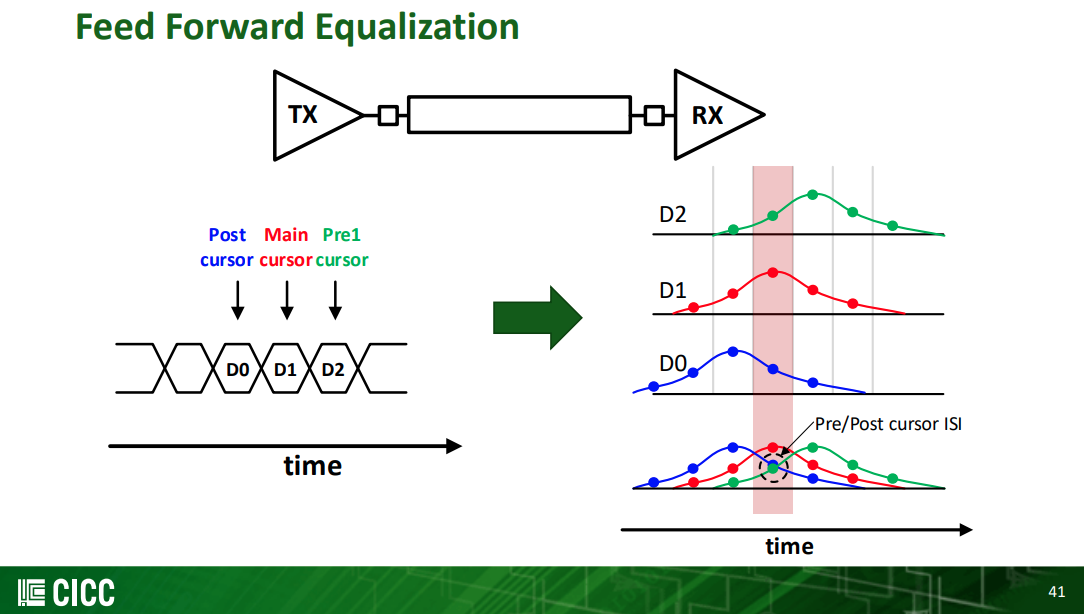
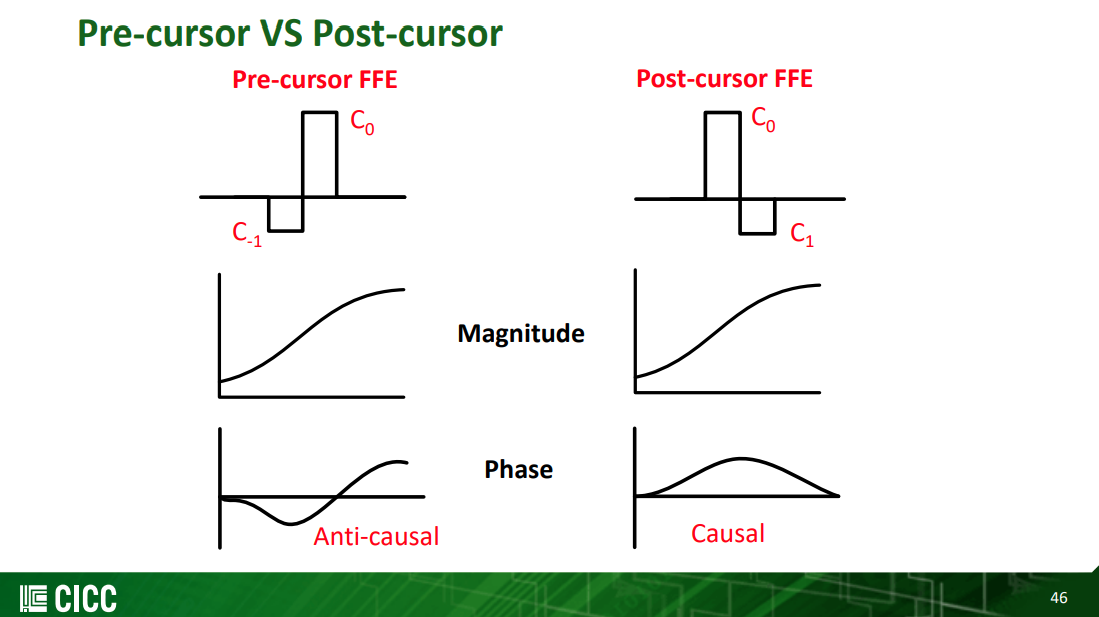
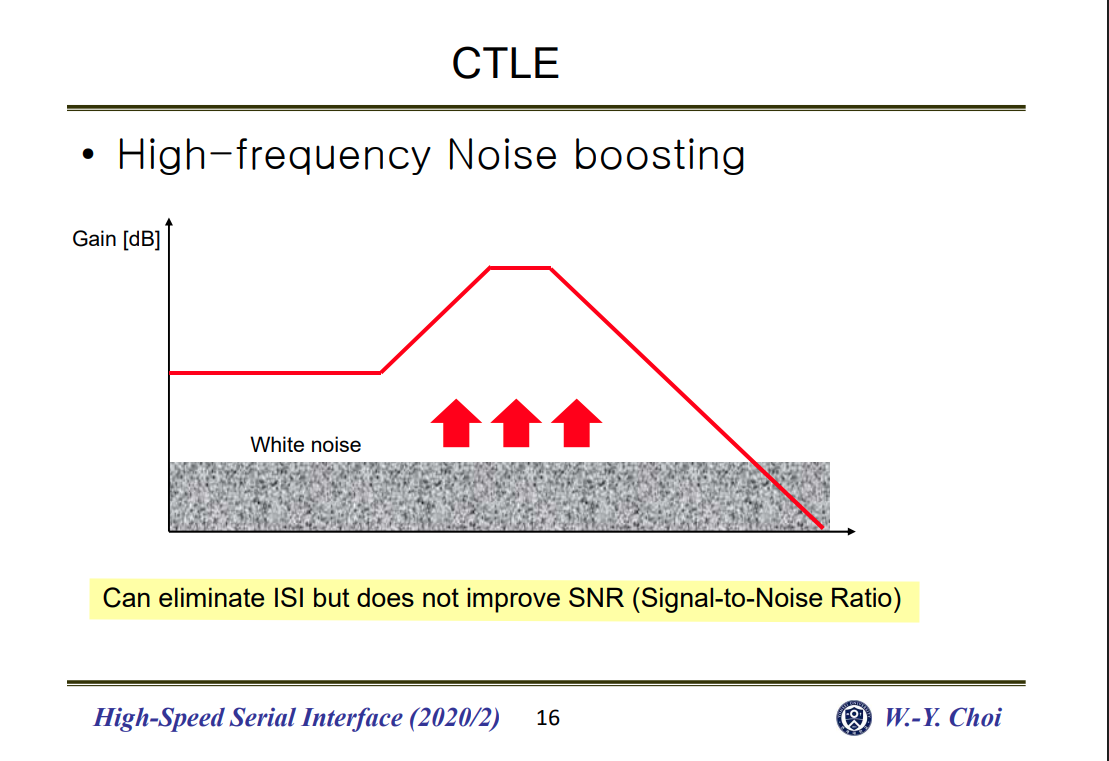
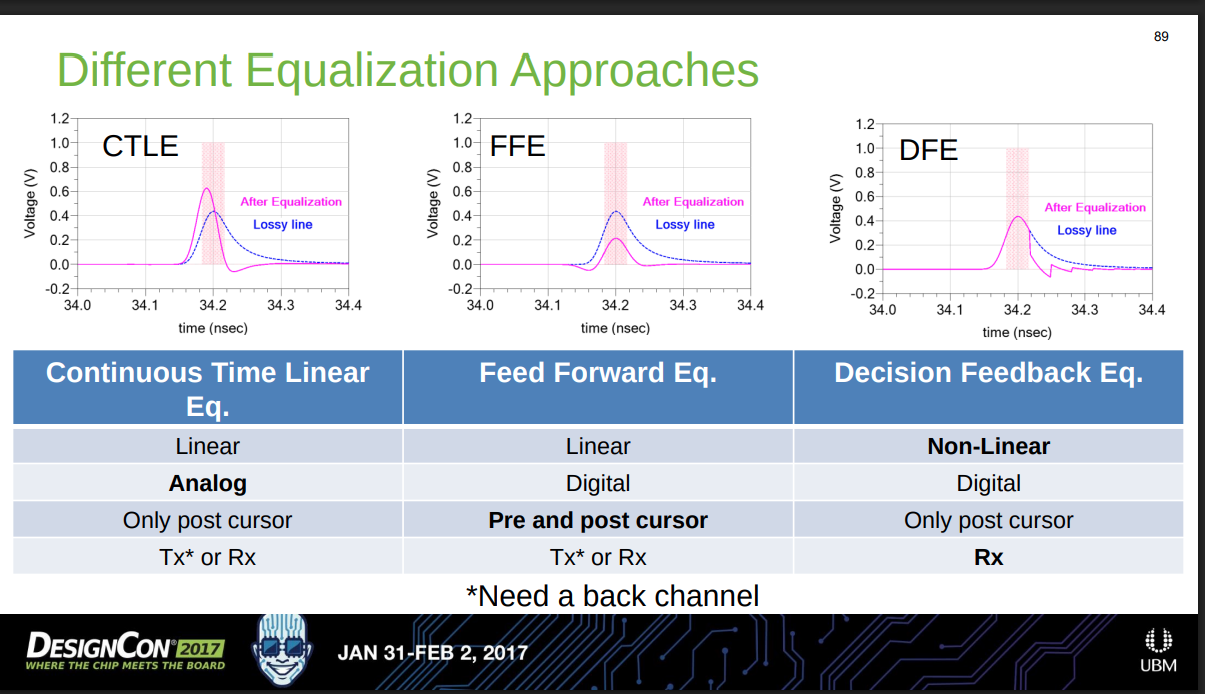
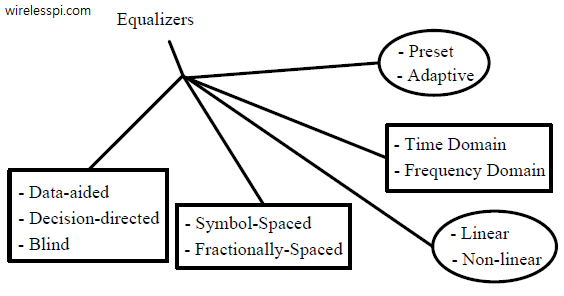
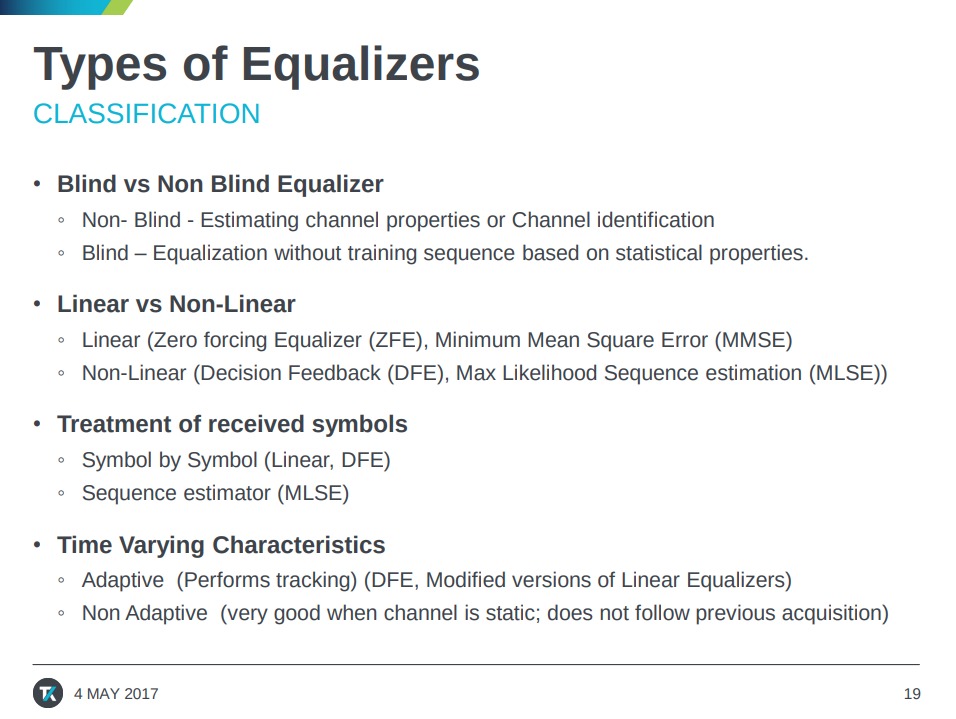
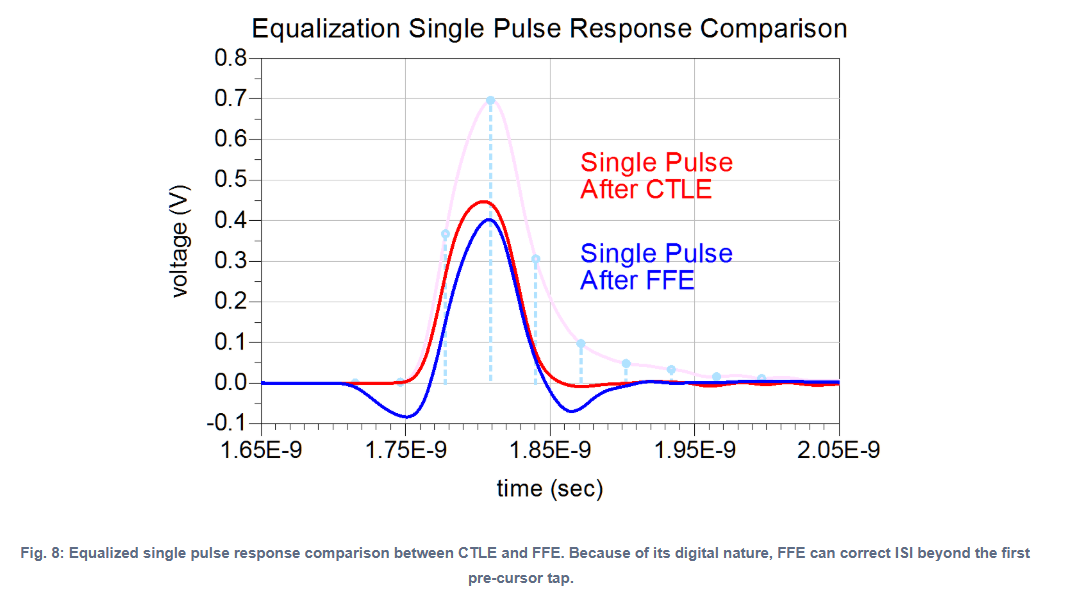
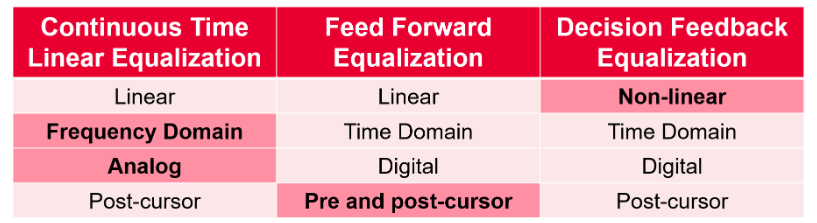
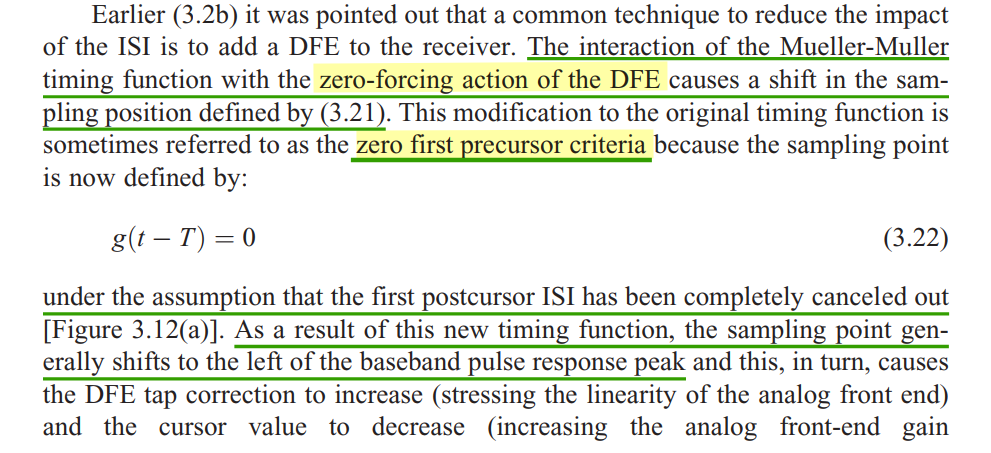
CTLE provide only limited improvement in the pre-cursor ISI, because
of the continuous-time, analog nature of CTLE
FFE to reduce ISI in both the pre-cursor and post-cursor, because of
operating digitally in discrete-time
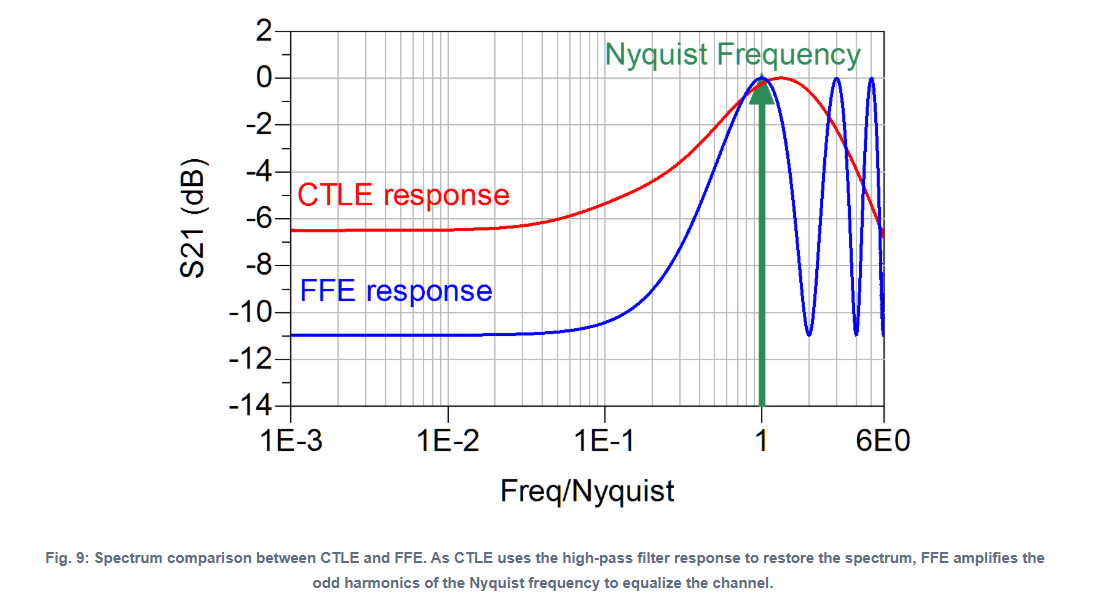
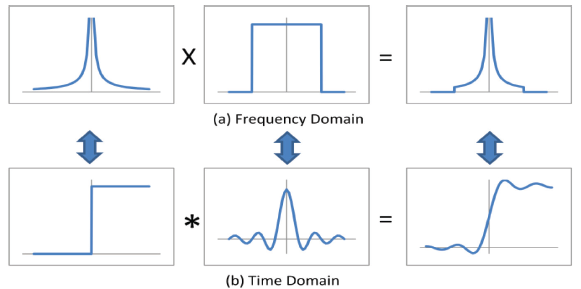
in the frequency domain
CTLE focuses on boosting frequency content at the
Nyquist frequency
FFE algorithm is selecting taps that effectively amplify the
odd harmonics of the Nyquist frequency
In the case of FFE, because of the nature of finite impulse response
filter, we would expect amplification and attenuation of different
harmonics of Nyquist Frequency
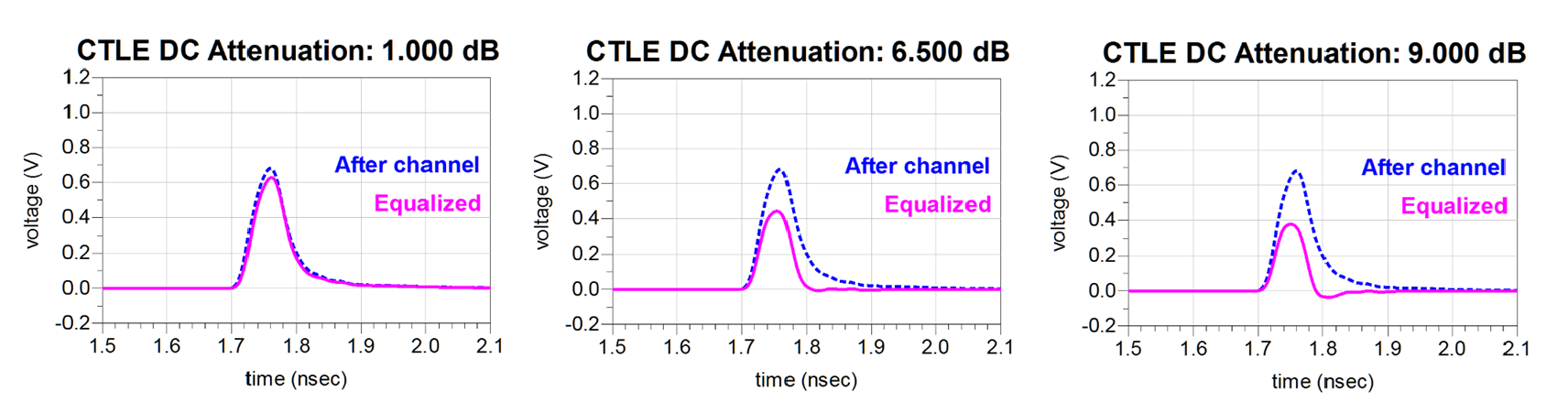
Until 6.5 dB of CTLE DC attenuation, the spread of the single pulse
is positive and reaches almost zero at 6.5 dB. As the
DC attenuation increases to more than 6.5 dB, the single pulse spectrum
is restored too much, resulting in a negative dip at the end of
the pulse
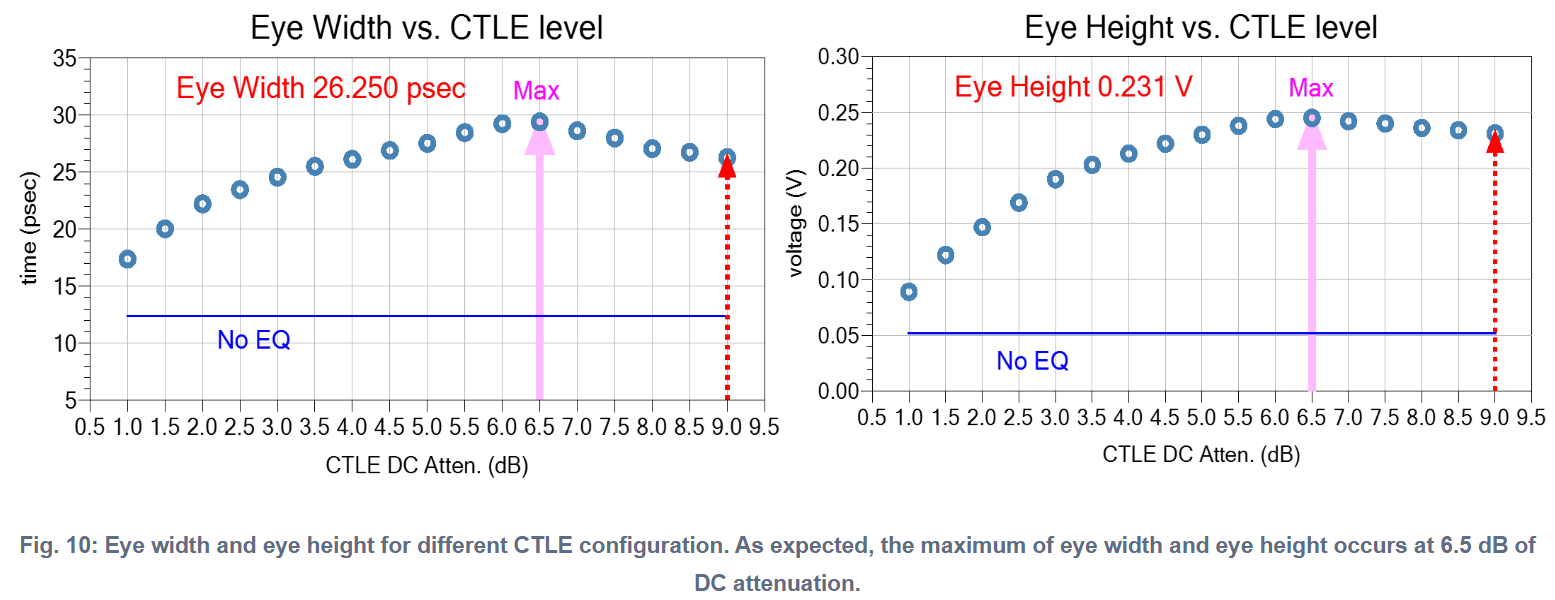
the maximum eye opening does not happen at maximum
DC attenuation at 9 dB
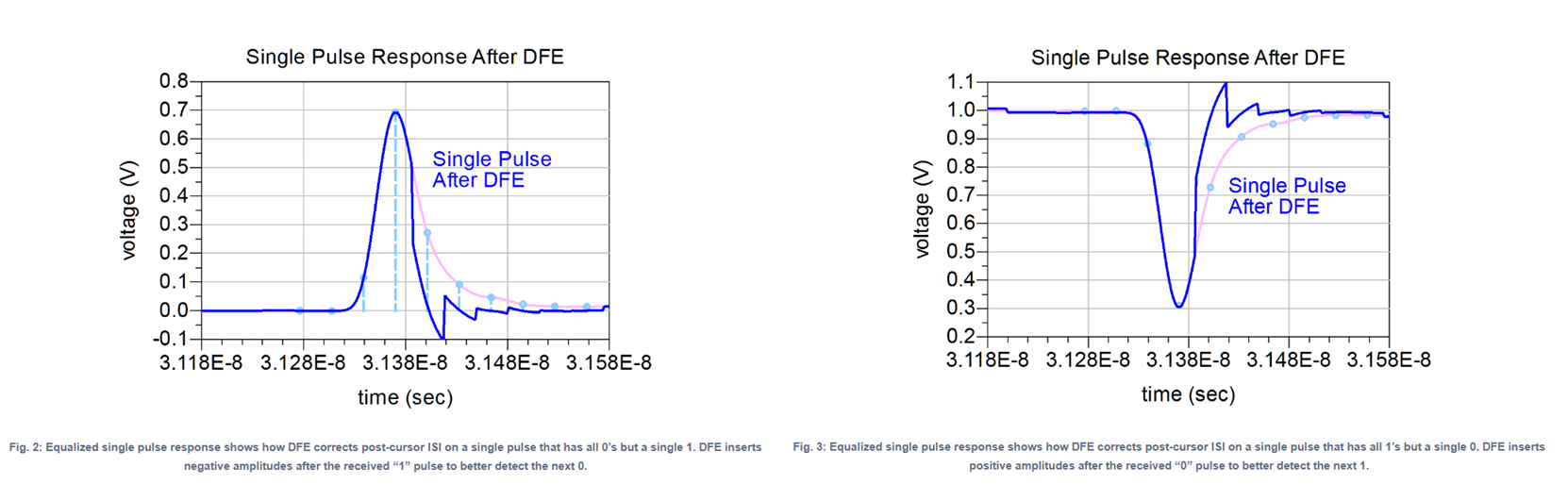
There are kinks in the eye diagram, the signature of an
opened DFE eye is different than other equalizations
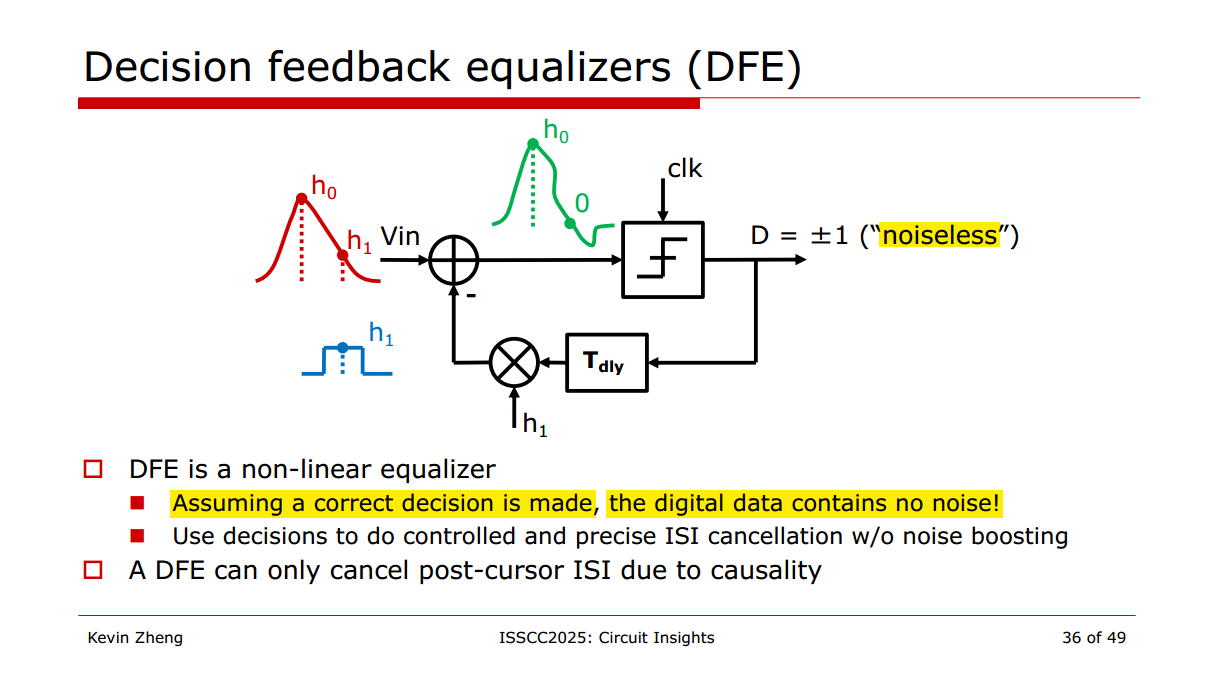
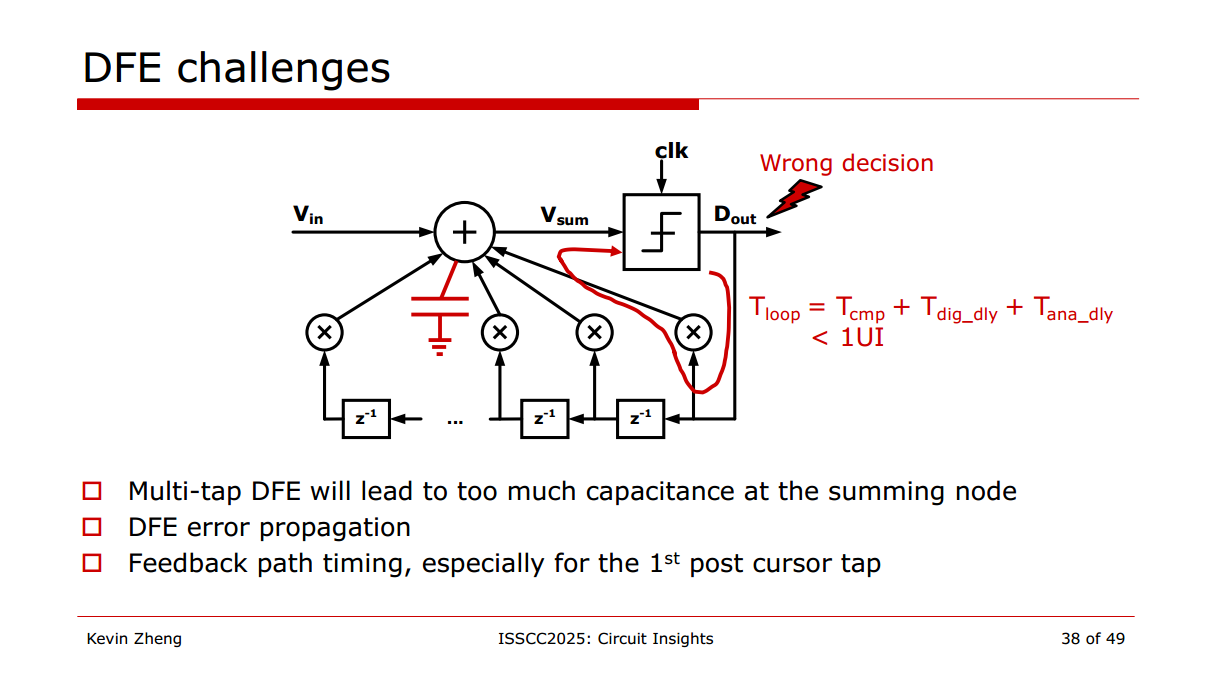
DFE algorithm is reducing ISI based on the detected data
(symbol)
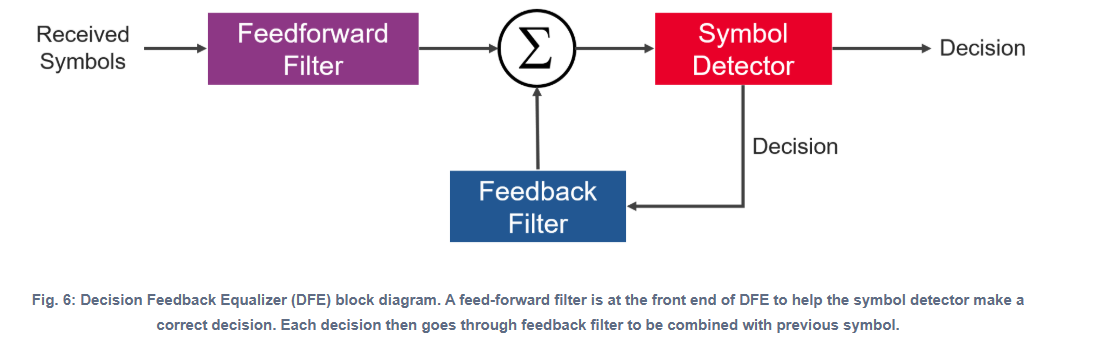
Since DFE assumes that past symbol decisions are correct.
Incorrect decisions from the symbol detector corrupt the filtering of
the feedback loop. As a result, the inclusion of the feedforward filter
on the front end is crucial in minimizing the probability of error
because symbol detection is nonlinear, decision feedback
equalization is also nonlinear
because of the nonlinearity of the DFE response, it must be modeled
in the time domain
FFE vs. DFE
FFE: convolution with input waveform/symbols.
Linear.
DFE: convolution with past detected symbols.
Recursive and nonlinear because of the slicer.
That is why DFE is not a simple LTI convolution system from input to
output.
1 2 3 4 5
received sample r[n] ──┬── subtract ──> slicer ──> detected symbol a_hat[n] ▲ │ │ │ └── DFE filter <─────┘ past decisions
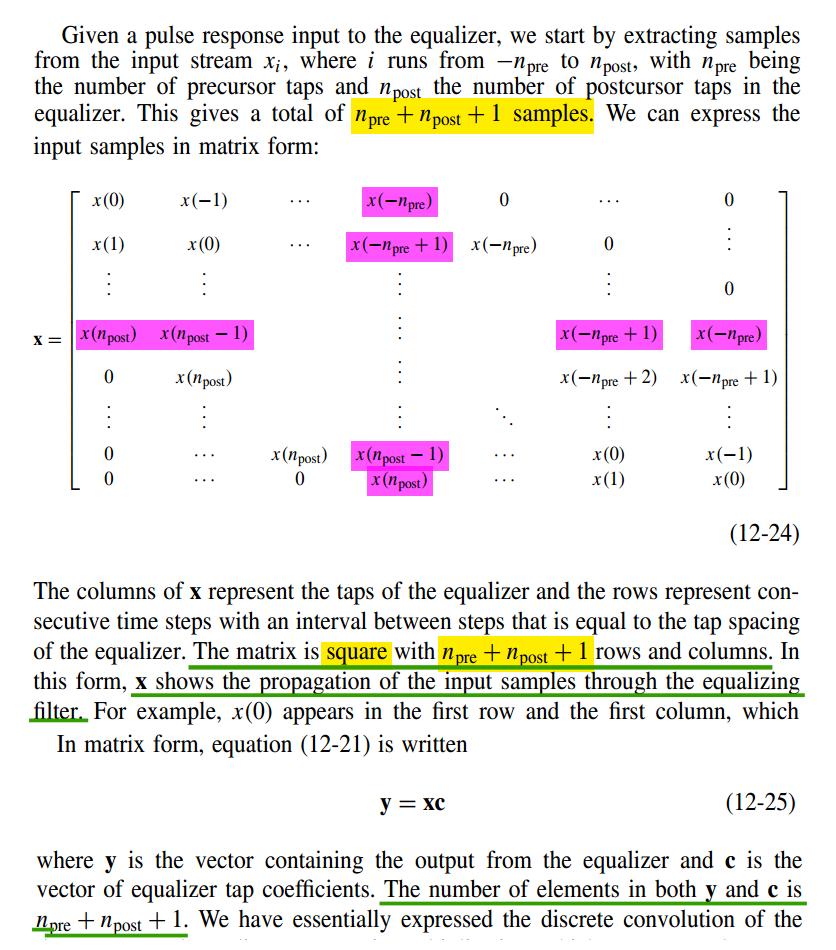
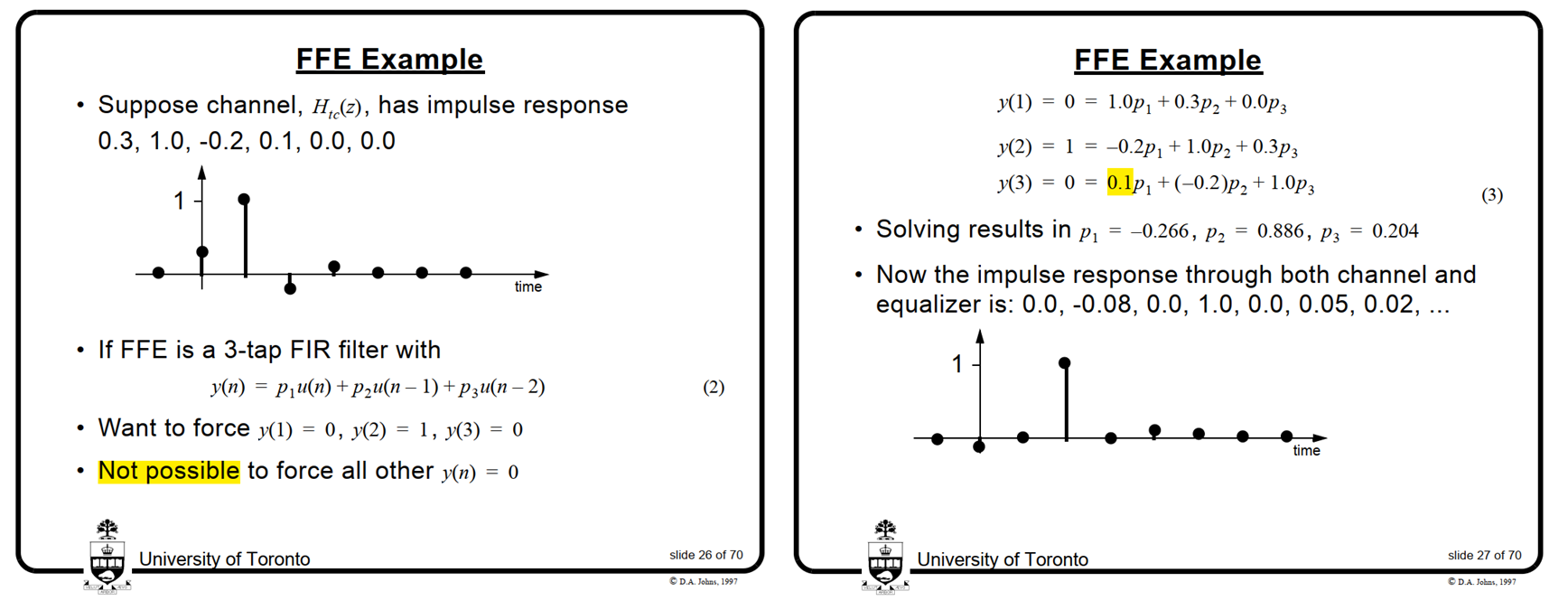
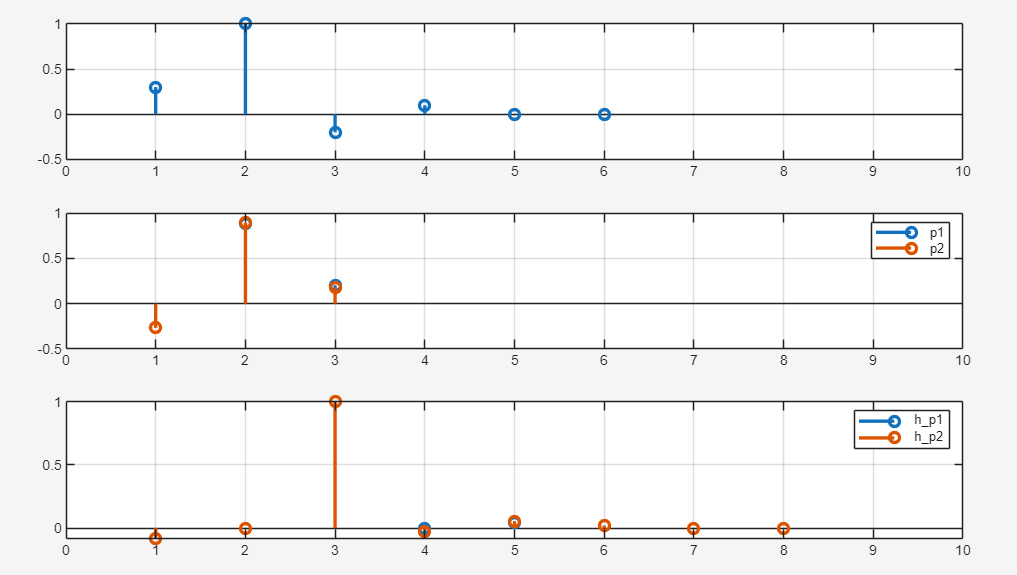
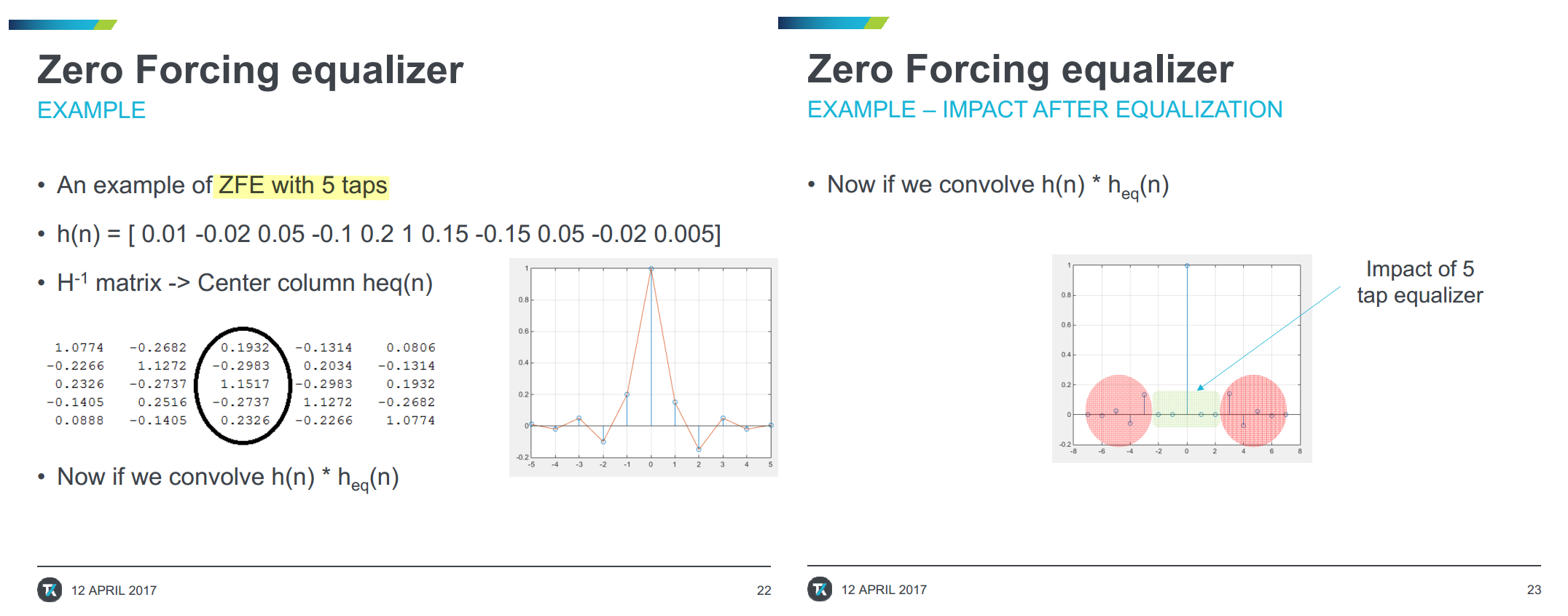
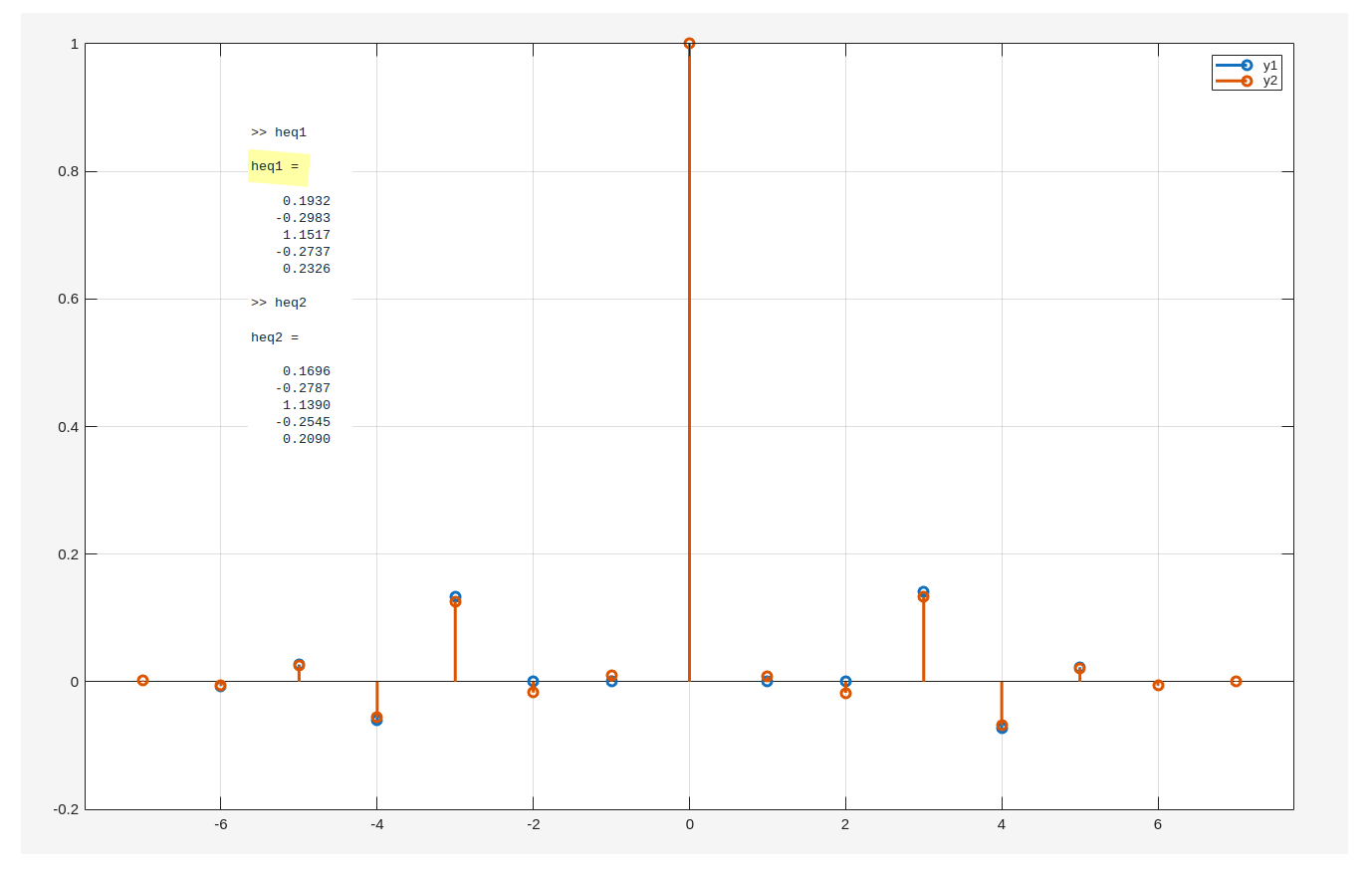
ZFS eliminates the ISI only at the sampling points that correspond
to the equalizer taps. The equalized pulse shows ISI in the intervals
between the sample points and at sample points outside the
equalizer
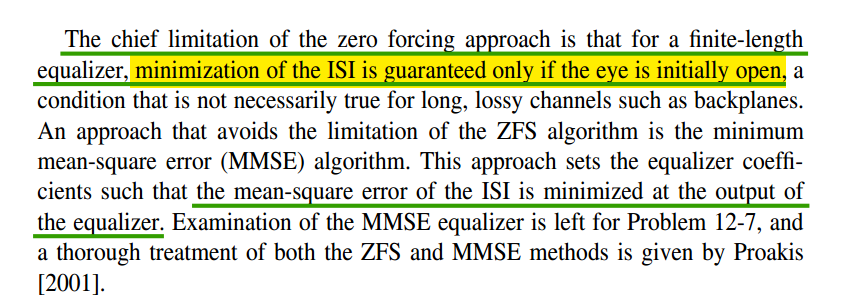
The Minimum Mean-Square Error Linear Equalizer (MMSE-LE)
balances ISI reduction and noise
enhancement. The MMSE-LE always performs as well as, or
better than, the ZFE
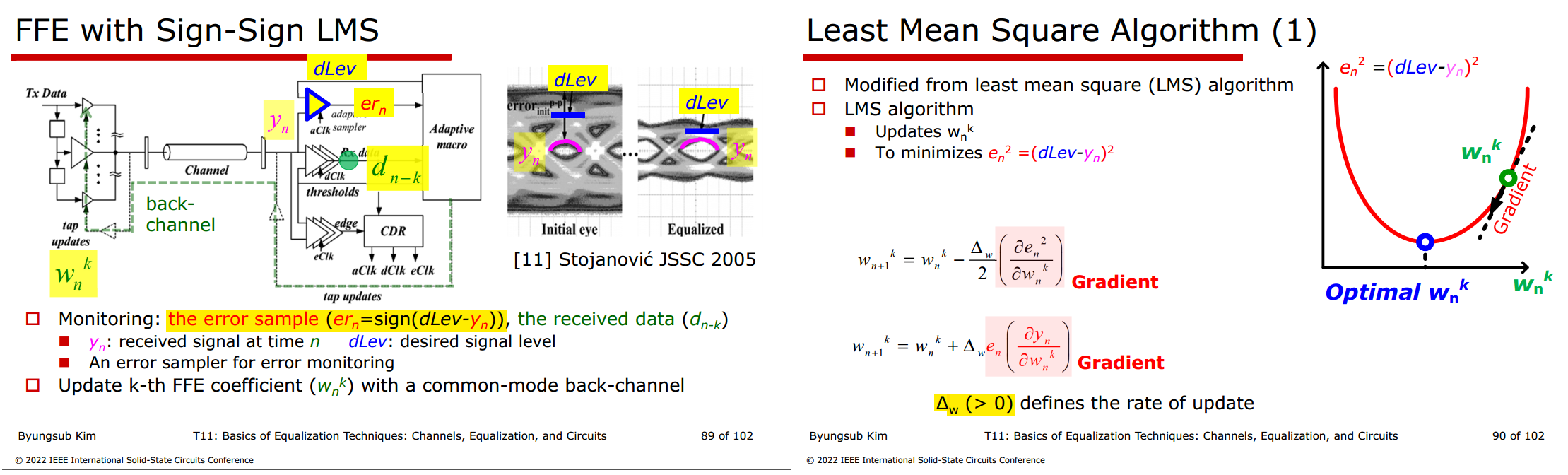
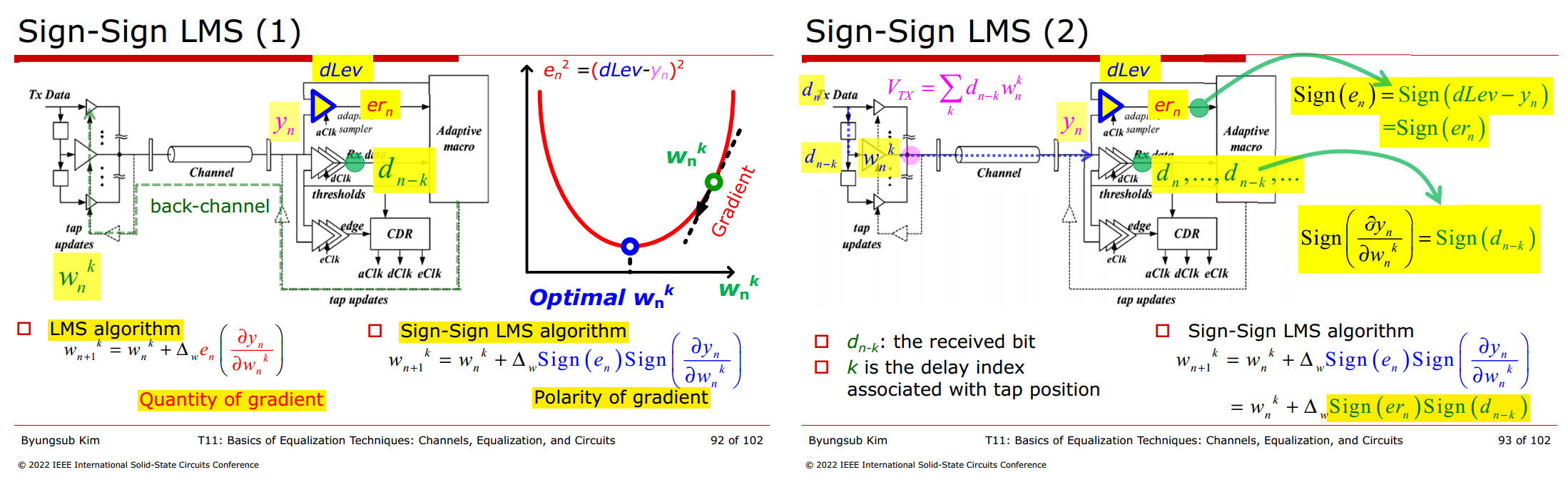
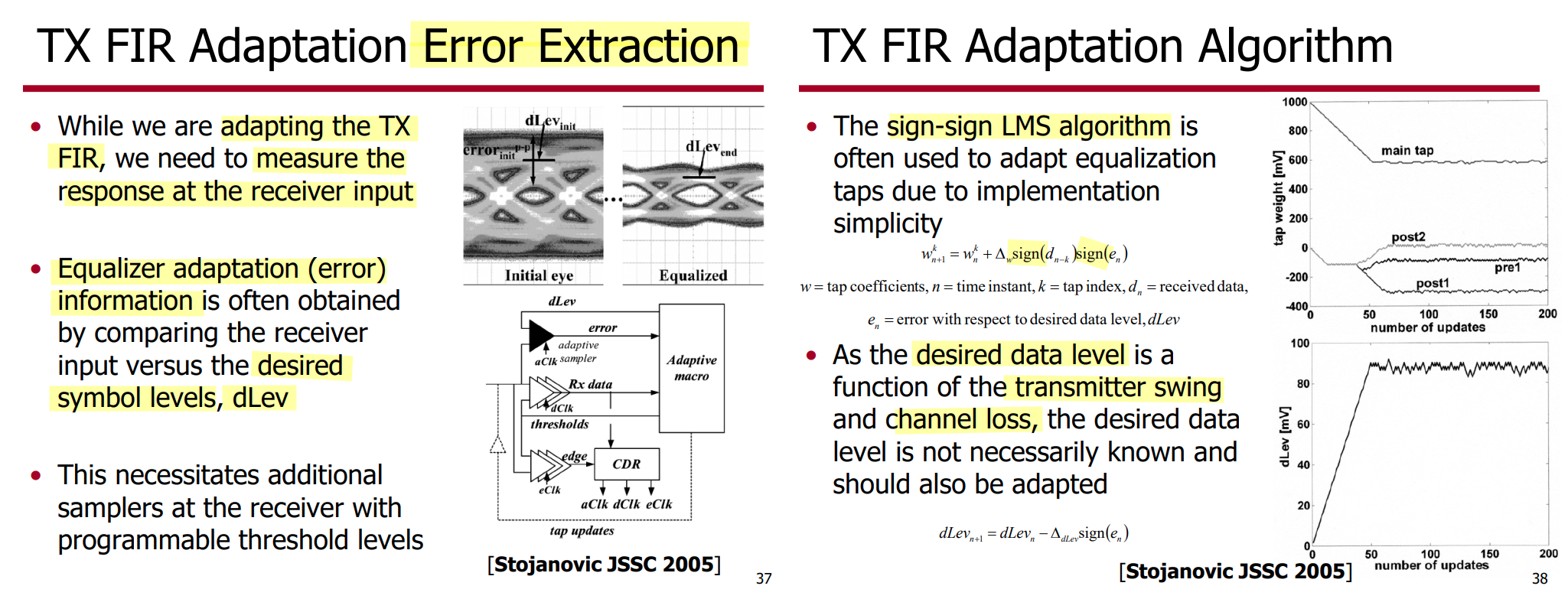
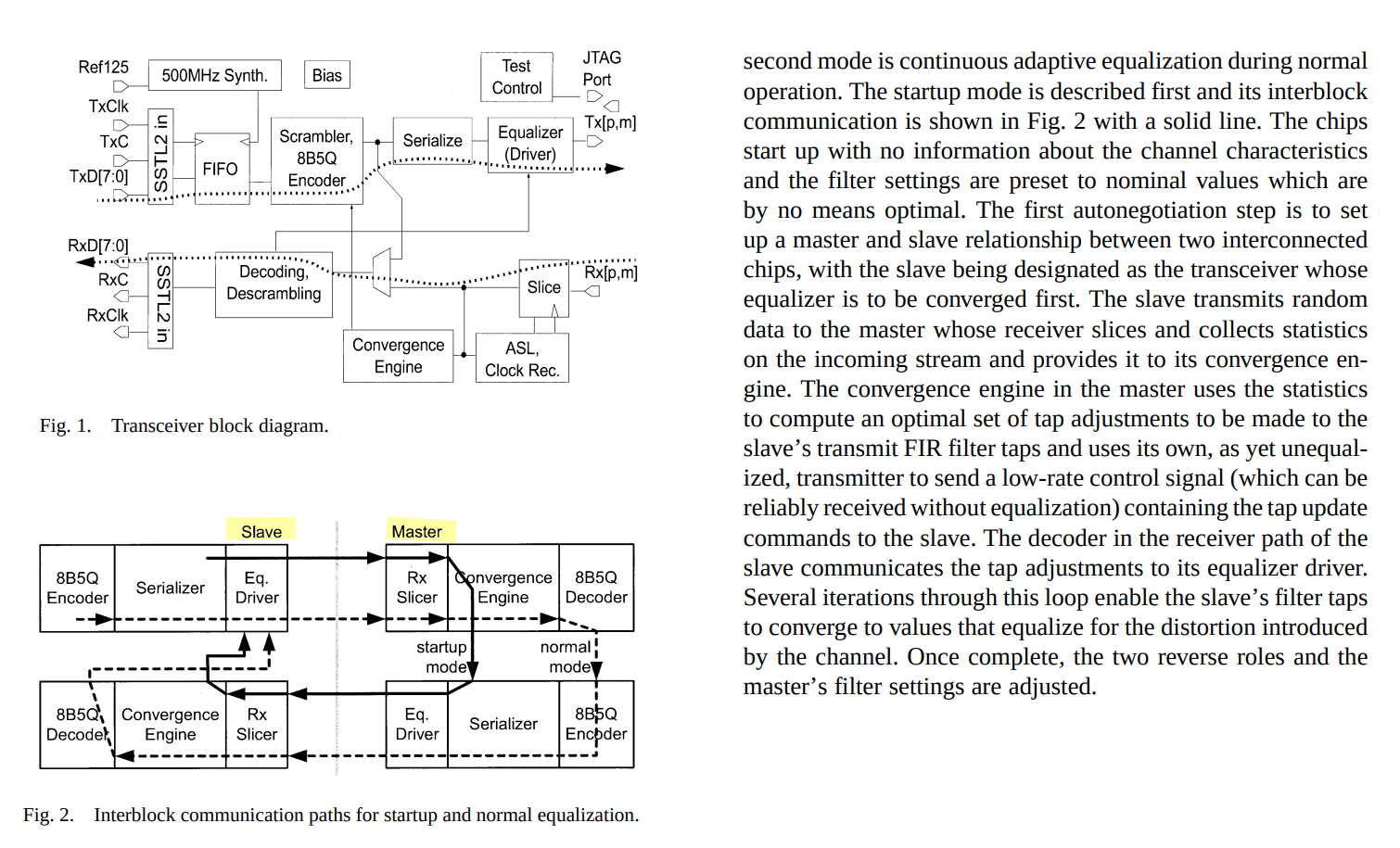
V. Stojanovic et al., "Autonomous dual-mode (PAM2/4) serial link
transceiver with adaptive equalization and data recovery," IEEE Journal
of Solid-State Circuits, vol. 40, no. 4, pp. 1012–1026, Apr. 2005 [https://sci-hub.ru/10.1109/JSSC.2004.842863]
J. T. Stonick, Gu-Yeon Wei, J. L. Sonntag and D. K. Weinlader, "An
adaptive PAM-4 5-Gb/s backplane transceiver in 0.25-μm CMOS," in IEEE
Journal of Solid-State Circuits, vol. 38, no. 3, pp. 436-443, March
2003, [https://sci-hub.st/10.1109/JSSC.2002.808282]
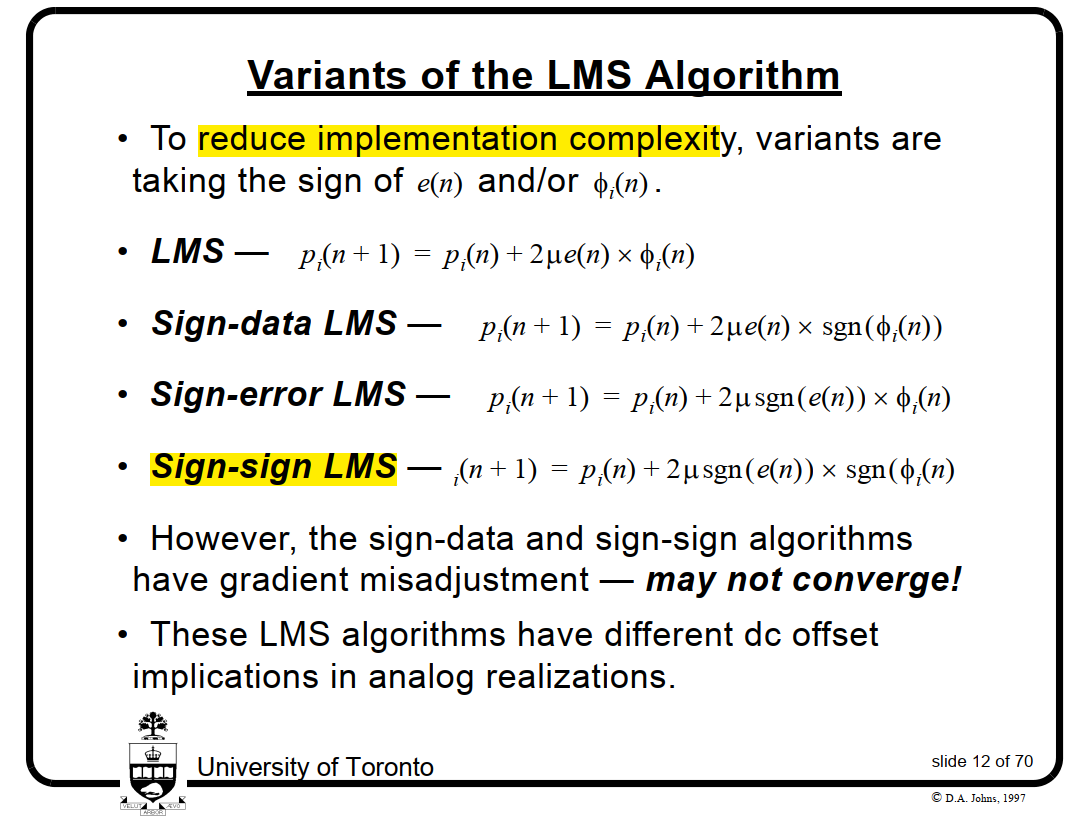
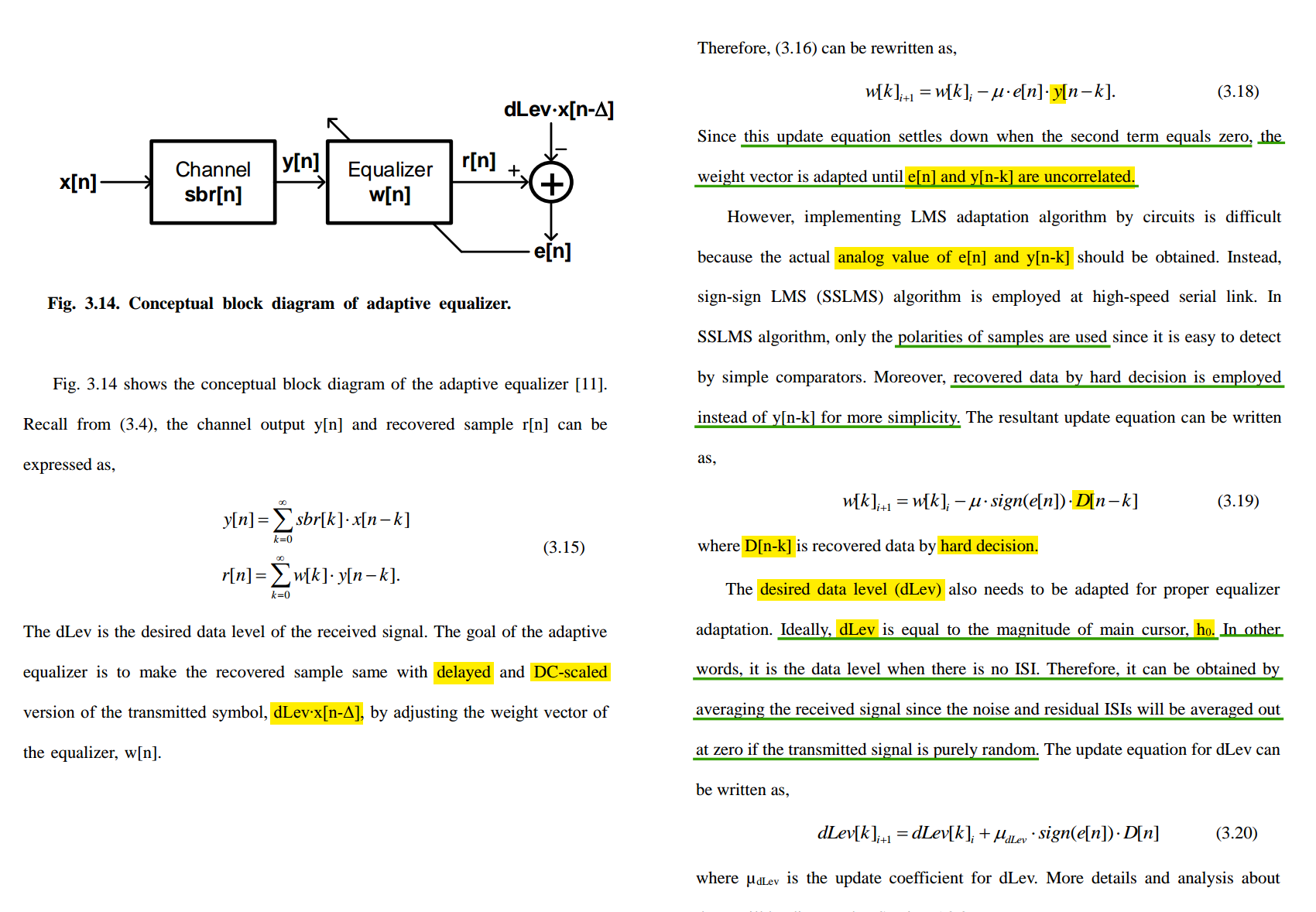
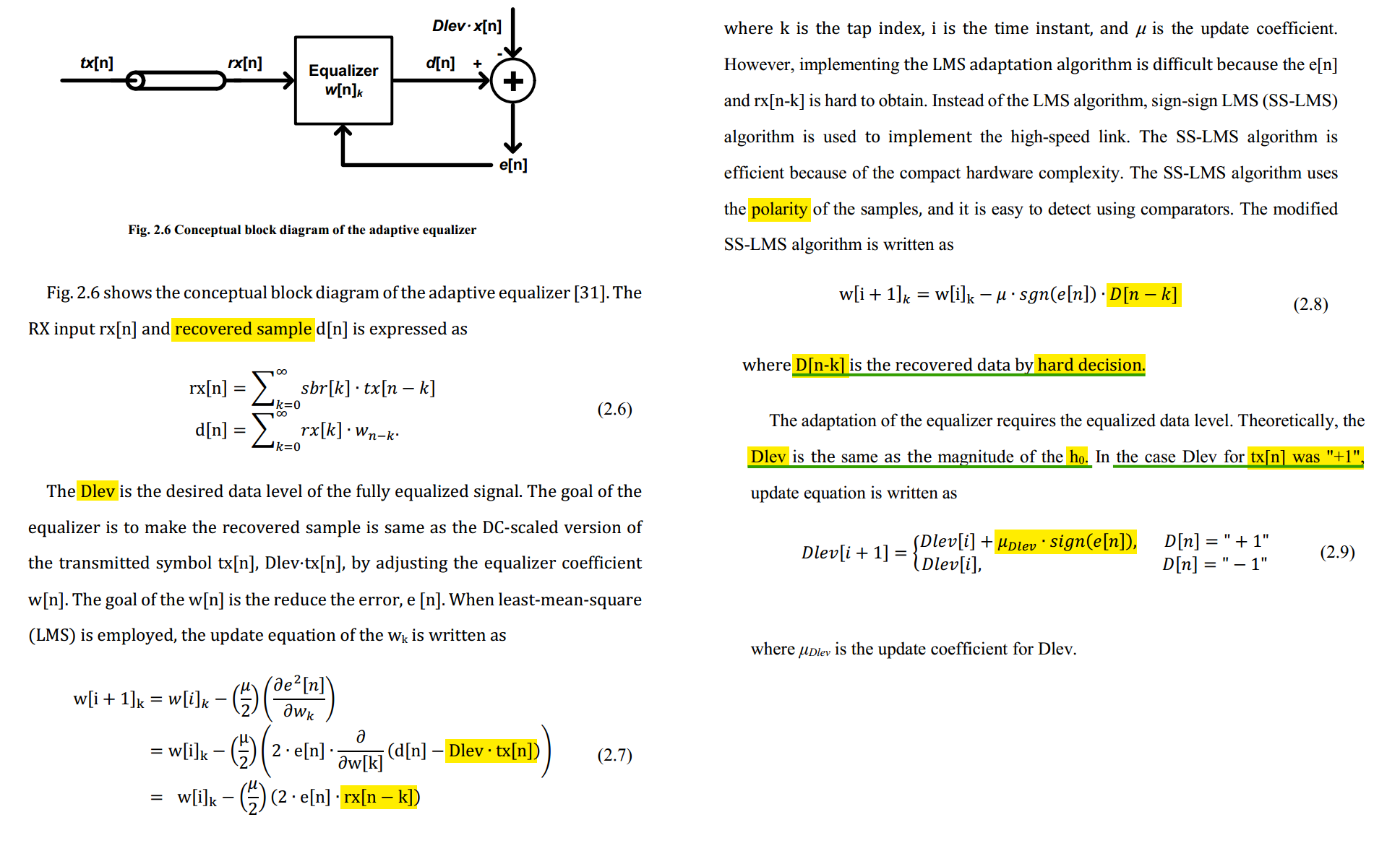
RX with SS-LMS
E. -H. Chen et al., "Near-Optimal Equalizer and Timing Adaptation for
I/O Links Using a BER-Based Metric," in IEEE Journal of Solid-State
Circuits, vol. 43, no. 9, pp. 2144-2156, Sept. 2008 [https://sci-hub.ru/10.1109/JSSC.2008.2001871]
K. Yadav, P. -H. Hsieh and A. C. Carusone, "Loop Dynamics Analysis of
PAM-4 Mueller–Muller Clock and Data Recovery System," in IEEE Open
Journal of Circuits and Systems, vol. 3, pp. 216-227, 2022 [https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9910561]
S. Kim, K. K. Tokgoz and G. Kim, "Modeling and Simulation of
Mueller-Muller Clock Data Recovery System for PAM-4 Wireline
Transceivers," 2025 IEEE/IEIE International Conference on Consumer
Electronics-Asia (ICCE-Asia), Busan, Korea, Republic of, 2025, pp.
1-3, doi: 10.1109/ICCE-Asia67487.2025.11263607
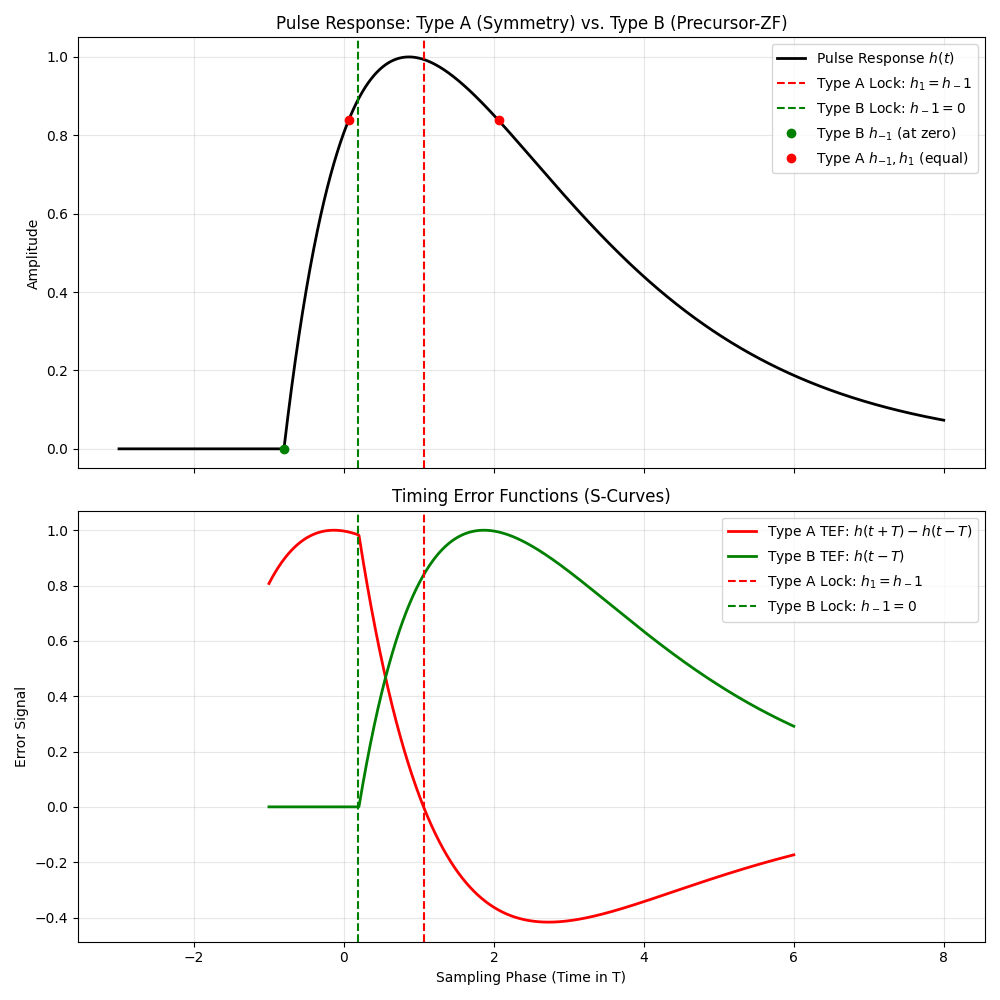
# Type B: Finding the LAST minimal error before h(-1) rises indices_b = np.where(np.abs(tef_b) == np.min(np.abs(tef_b)))[0] t_lock_b = phases[indices_b][-1]
# 4. Plotting Results plt.figure(figsize=(10, 6)) plt.plot(t_cont, h_cont, 'k-', lw=2, label='Pulse Response $h(t)$') plt.axvline(t_lock_a, color='red', linestyle='--', label=f'Type A Lock: {t_lock_a:.2f}T') plt.axvline(t_lock_b, color='green', linestyle='--', label=f'Type B Lock: {t_lock_b:.2f}T') plt.plot(t_lock_b - 1, get_h(t_lock_b - 1), 'go', label='Type B: $h_{-1}=0$') plt.title('Baud Rate Lock: Type A (Symmetry) vs. Type B (Last-Zero Precursor)') plt.legend() plt.grid(True, alpha=0.3) plt.show()
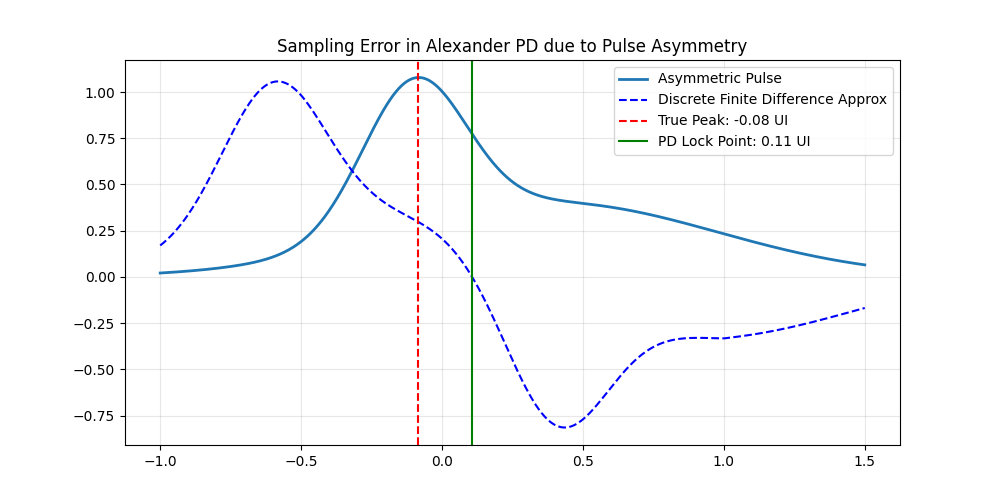
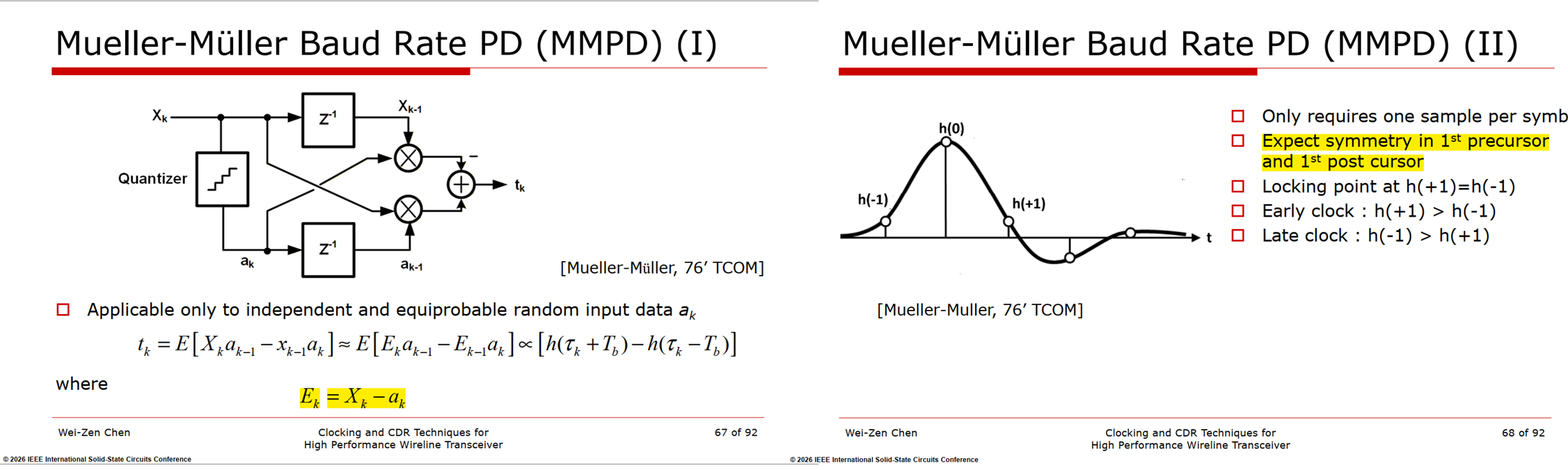
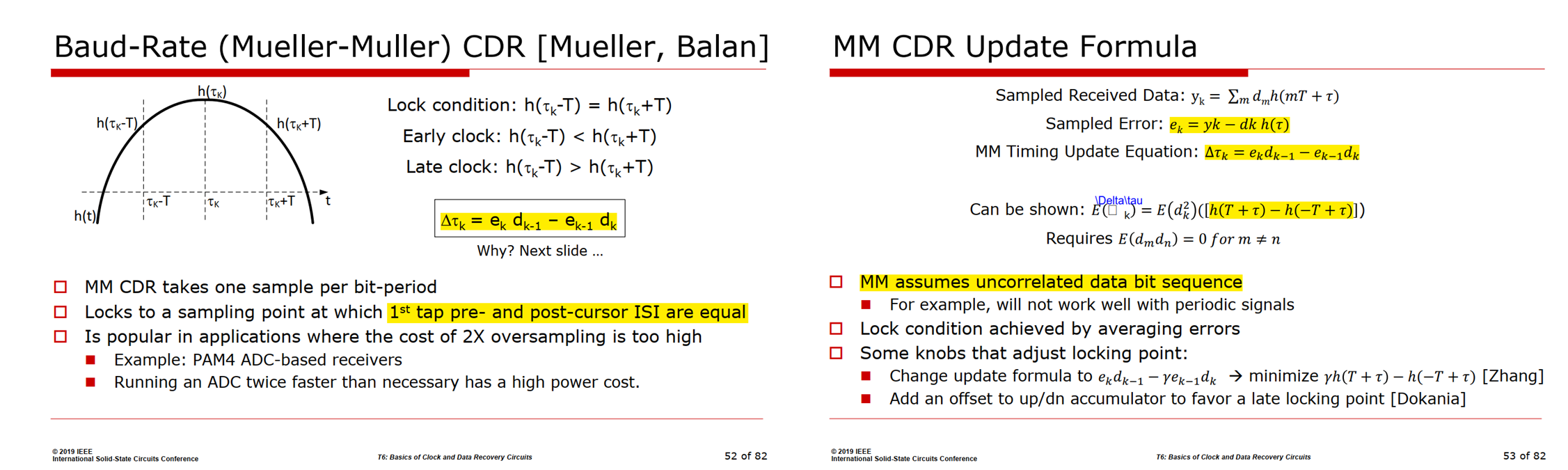
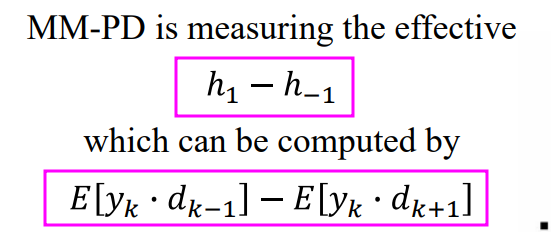
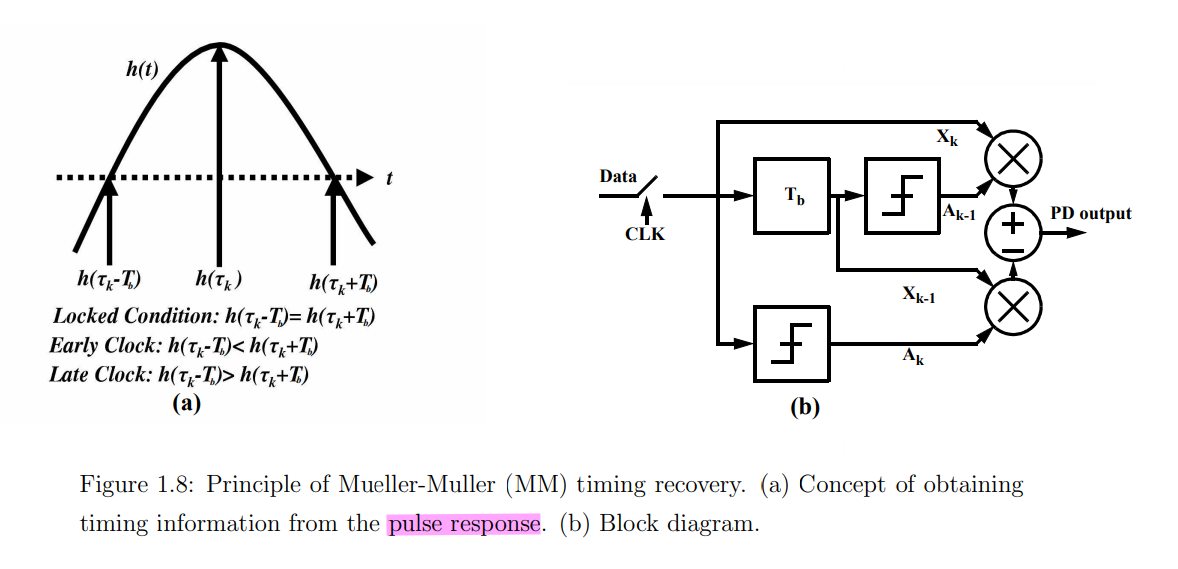
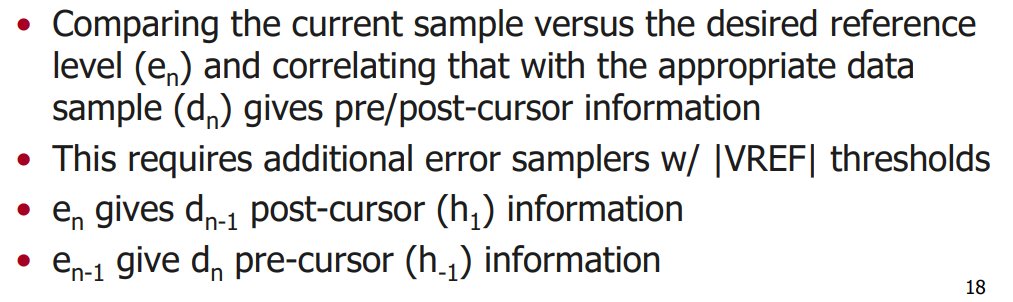
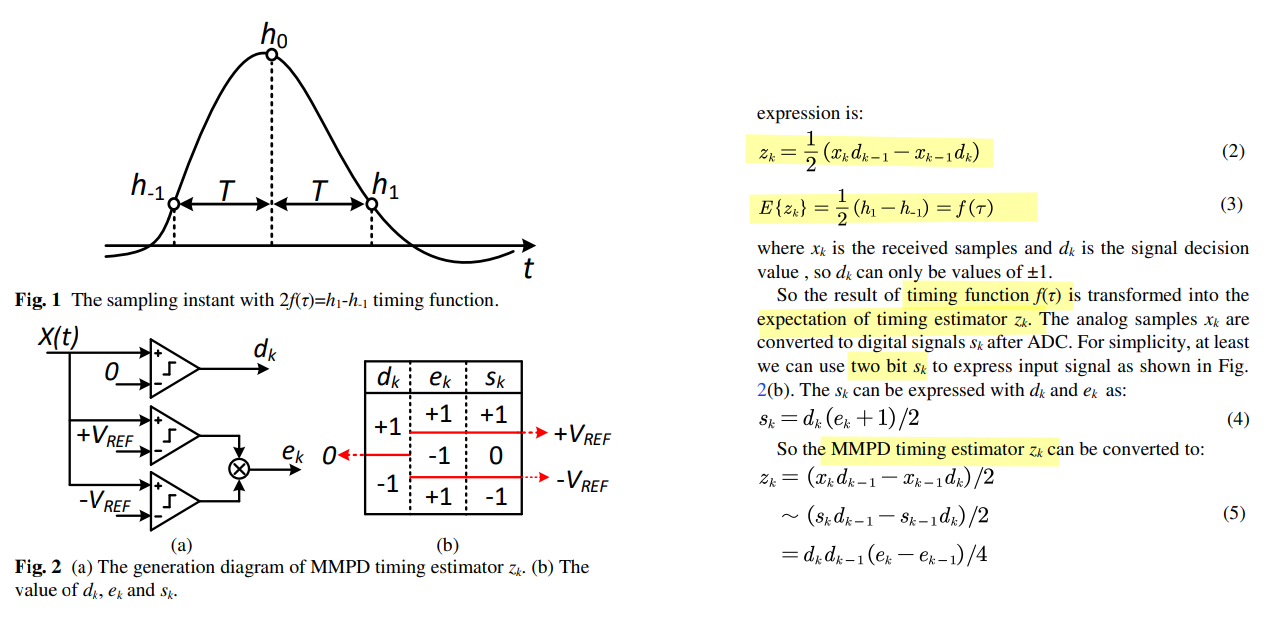
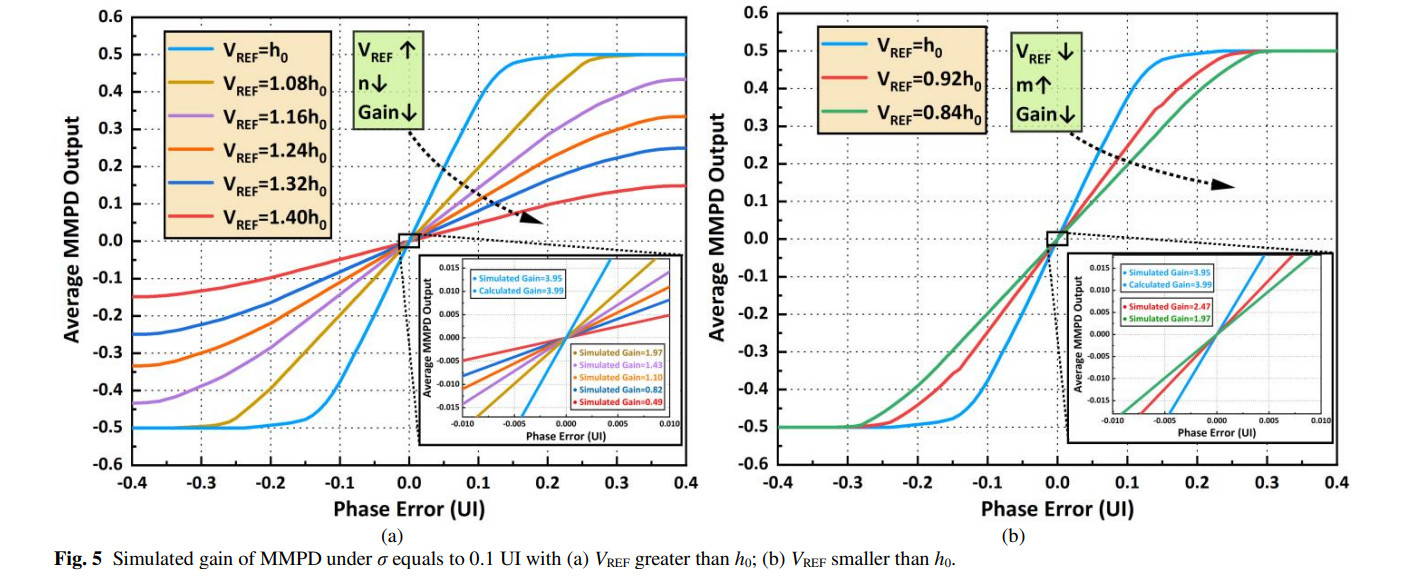
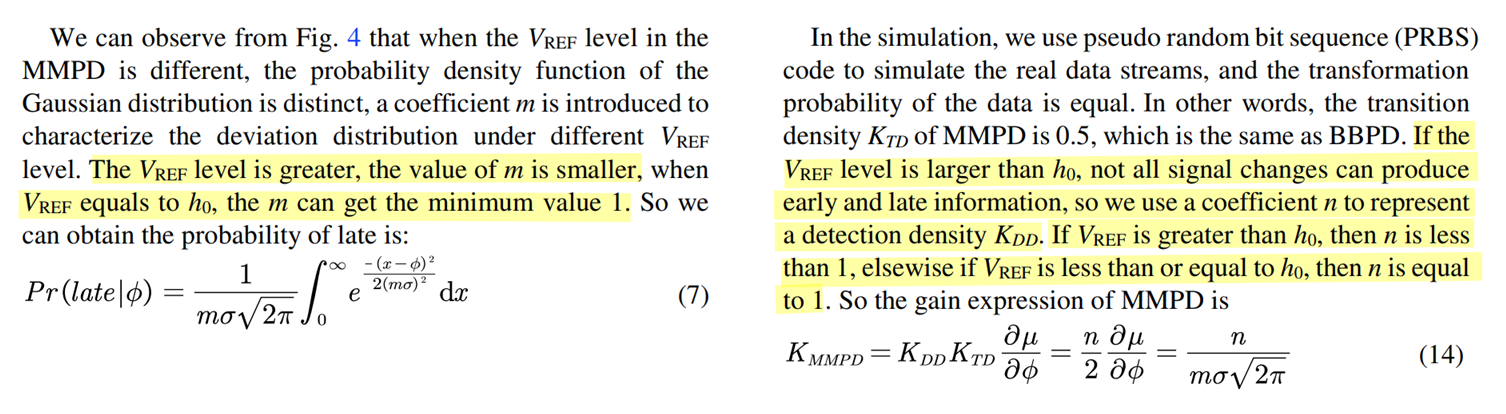
Suppose 1-precursor, 1-postcursor — \(y_k =
d_{k-1}h_1 + d_k h_0 + d_{k+1}h_{-1}\)\[
\color{red}E[y_k\cdot d_{k-1}] - E[y_k\cdot d_{k+1}] =
E[|d_{k-1}|^2h_{1}] - E[|d_{k+1}|^2h_{-1}] =h_1-h_{-1}
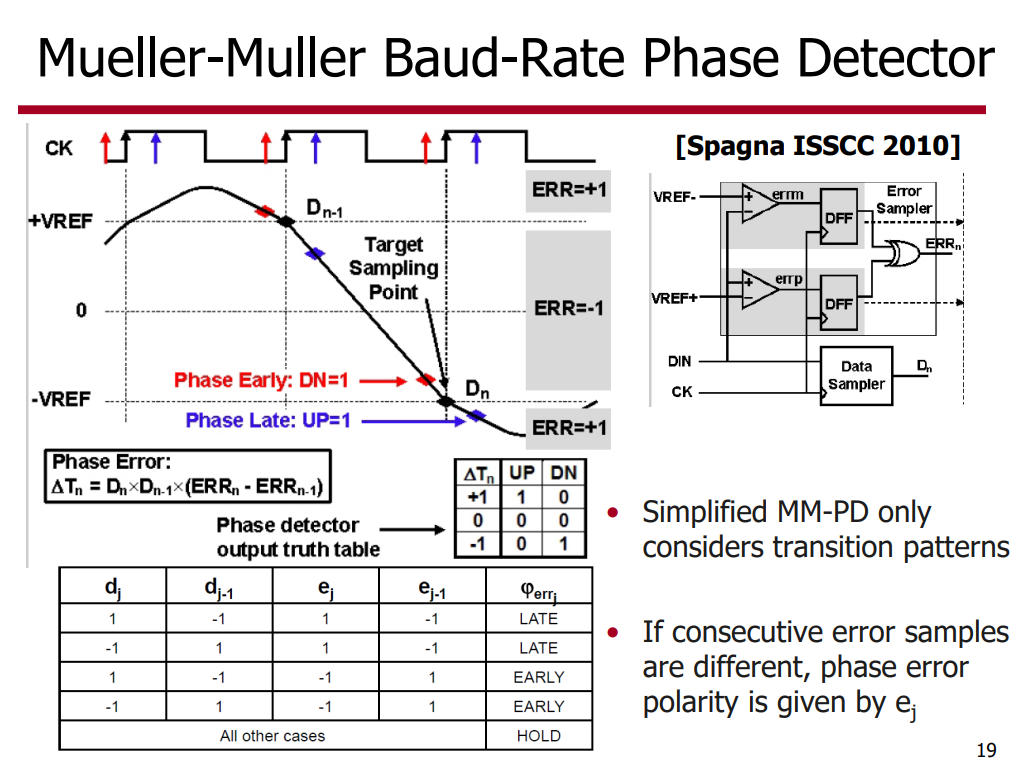
\] MMPD infers the channel response from baud-rate samples of the
received data, the adaptation aligns the sampling clock such that
pre-cursor is equal to the post-cursor in the pulse
response
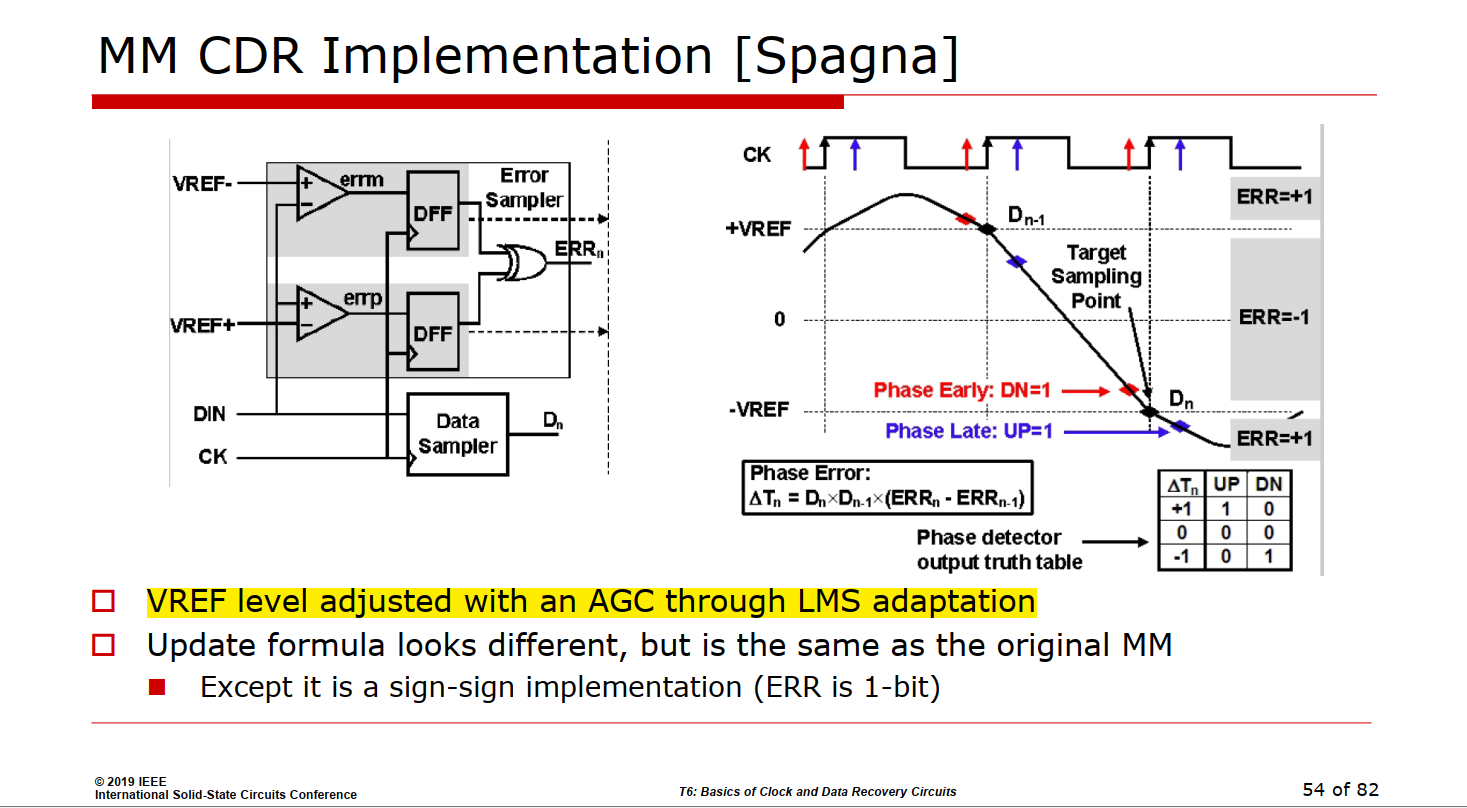
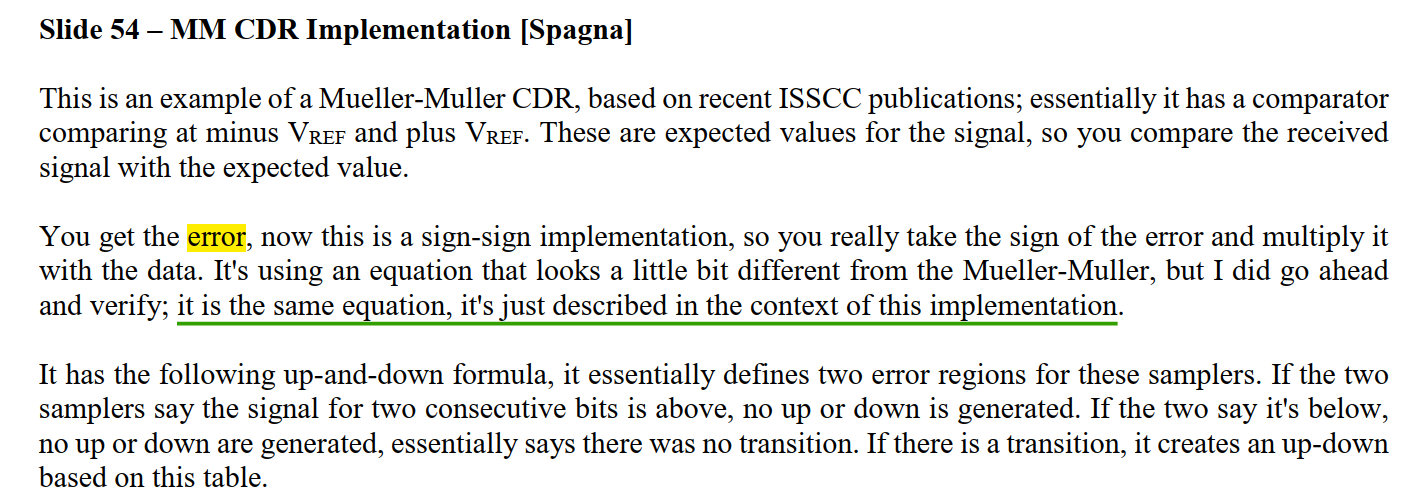
F. Spagna et al., "A 78mW 11.8Gb/s serial link transceiver
with adaptive RX equalization and baud-rate CDR in 32nm CMOS," 2010
IEEE International Solid-State Circuits Conference - (ISSCC), San
Francisco, CA, USA, 2010, [https://sci-hub.ru/10.1109/ISSCC.2010.5433823]
Chen, J., Gu, Y., Feng, X., Chi, R., Wu, J., & Chen, Y. (2024).
Analysis of Mueller–Muller Clock and Data Recovery Circuits with a
Linearized Model. Electronics, 13(21), 4218 [https://www.mdpi.com/2079-9292/13/21/4218]
Liu, Tao & Li, Tiejun & Lv, Fangxu & Liang, Bin &
Zheng, Xuqiang & Wang, Heming & Wu, Miaomiao & Lu, Dechao
& Zhao, Feng. (2021). Analysis and Modeling of Mueller-Muller Clock
and Data Recovery Circuits. Electronics. [10.
1888. 10.3390/electronics10161888.]
Gu, Youzhi & Feng, Xinjie & Chi, Runze & Chen, Yongzhen
& Wu, Jiangfeng. (2022). Analysis of Mueller-Muller Clock and Data
Recovery Circuits with a Linearized Model. [10.21203/rs.3.rs-1817774/v1]
Adjust Locking Point
Avago Technologies, US8649476B2 Adjusting sampling phase in a
baud-rate CDR using timing skew [pdf]
Y. Jung, H. -J. Shin, J. Kim, S. Lee, J. -S. Park and K. Park, "A
28-Gb/s Receiver with Baud-Rate CDR Employing Integrated Pattern-Based
Phase Detector Achieving ISI Invariant Phase Locking," 2025 IEEE
Asian Solid-State Circuits Conference (A-SSCC), Daejeon, Korea,
Republic of, 2025,
R. Dokania et al., "10.5 A 5.9pJ/b 10Gb/s serial link with
unequalized MM-CDR in 14nm tri-gate CMOS," 2015 IEEE International
Solid-State Circuits Conference - (ISSCC) Digest of Technical
Papers, San Francisco, CA, USA, 2015 [https://sci-hub.jp/10.1109/ISSCC.2015.7062987]
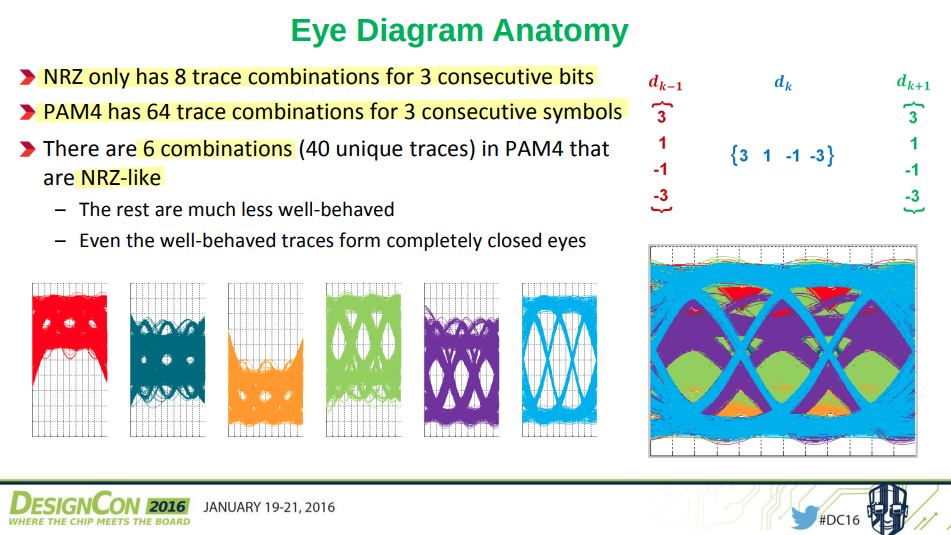
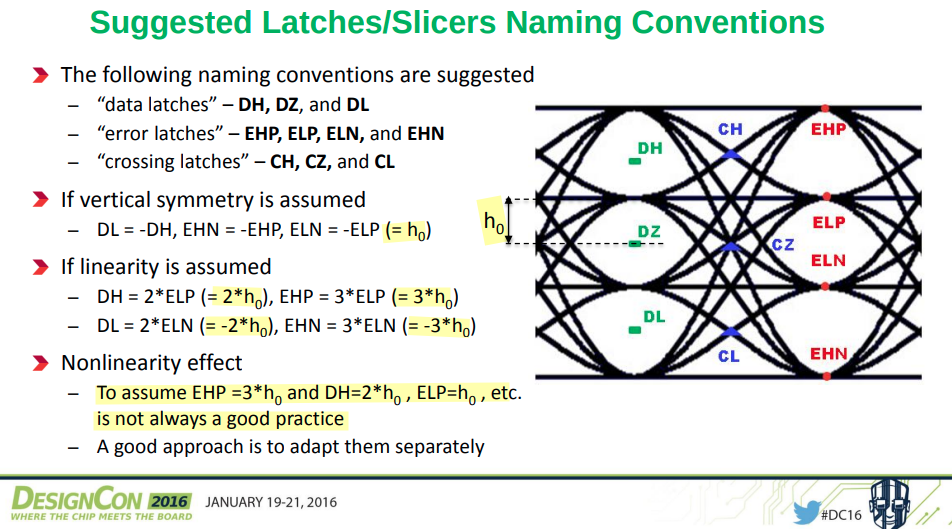
H. Zhang, B. Jiao, Y. Liao, and G. Zhang, "A Tutorial on PAM4
Signaling for 56G Serial Link," [DesignCon
2016], [DesignCon
2017]
David Johns. ECE1392H - Integrated Circuits for Digital
Communications - Fall 2001: [Equalization],
[Timing
Recovery]
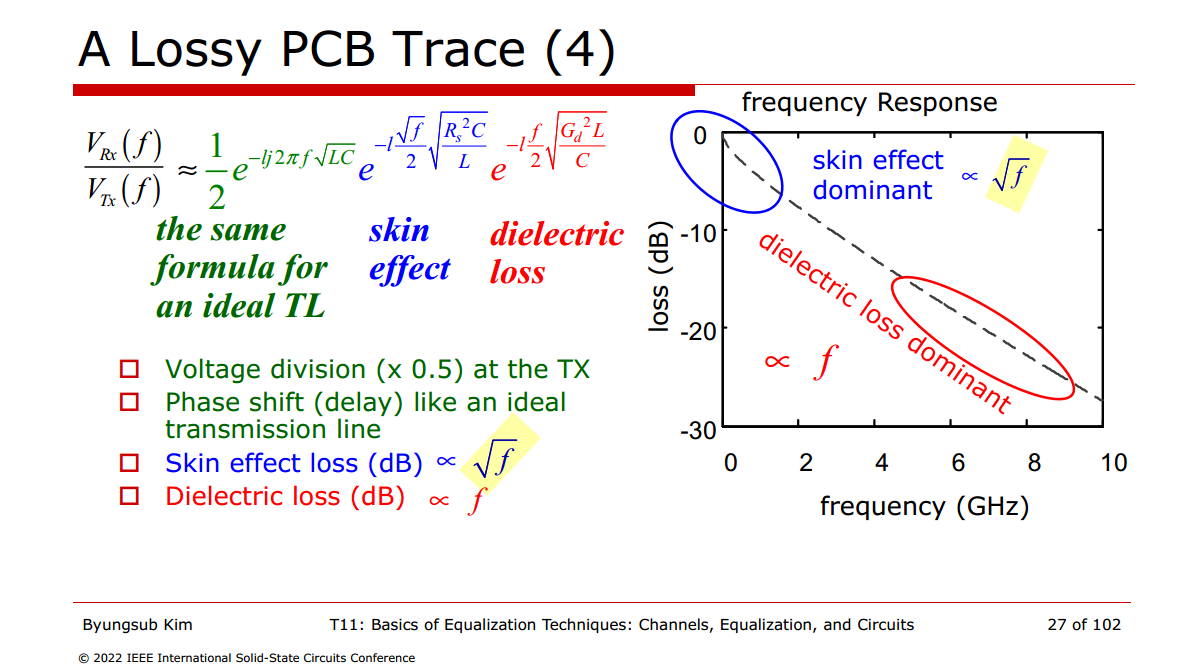
B. Kim, "Tutorial: Basics of Equalization Techniques: Channels,
Equalization, and Circuits," 2022 IEEE International Solid-State
Circuits Conference (ISSCC), San Francisco, CA, USA, 2022
Gain Kim, 2023. Equalization, Architecture, and Circuit Design for
High-Speed Serial Link Receiver [pdf]
—, CICC2022 ES4: Equalization, Architecture, and Circuit Design for
High-Speed Serial Link Receiver
S. Laxman, "Equalization algorithms in Millimeter wave communication
systems," 2017 IEEE Custom Integrated Circuits Conference
(CICC), Austin, TX, USA, 2017 [pdf]
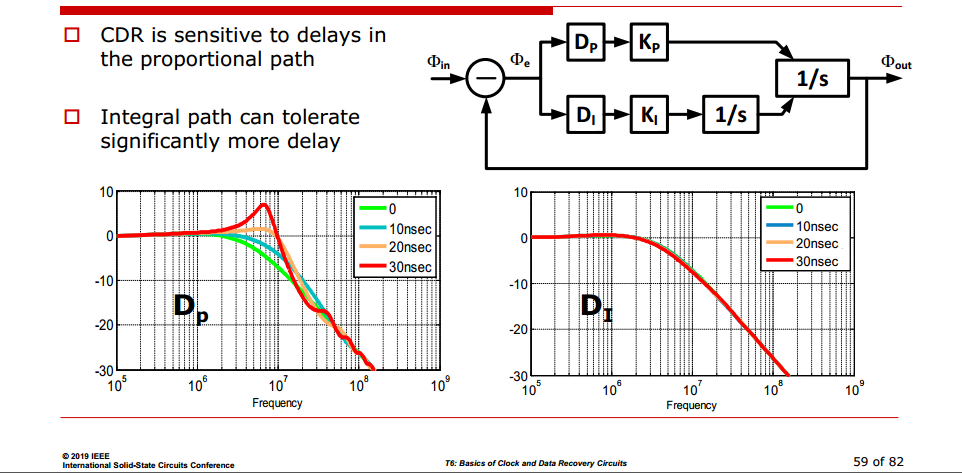
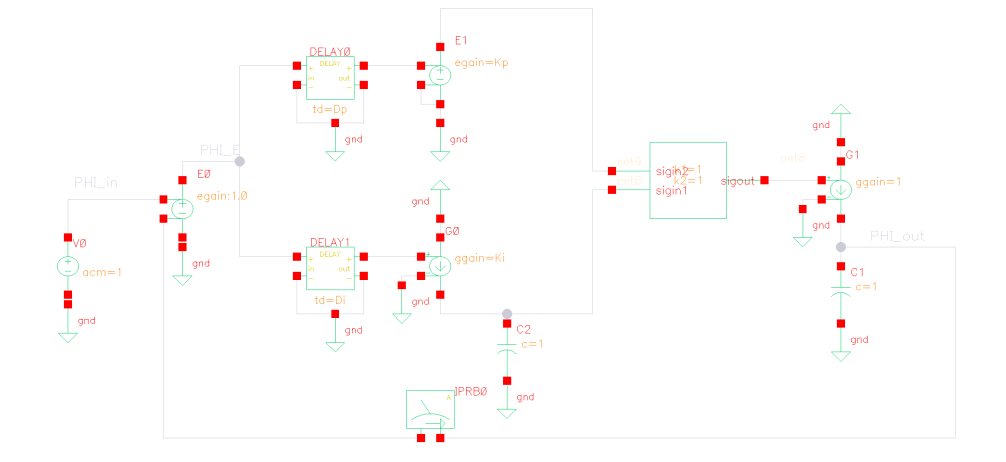
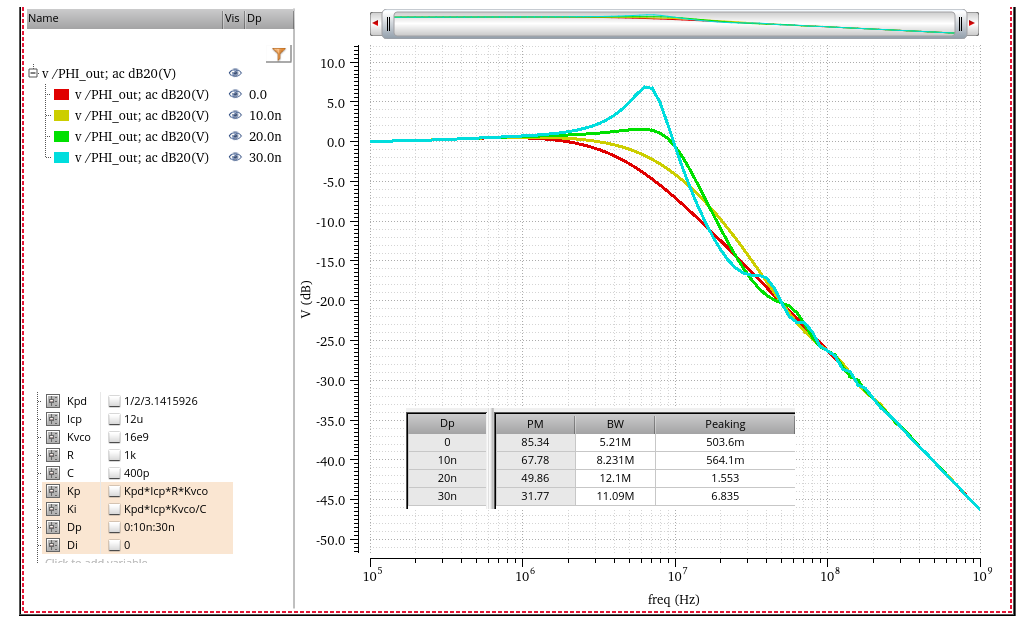
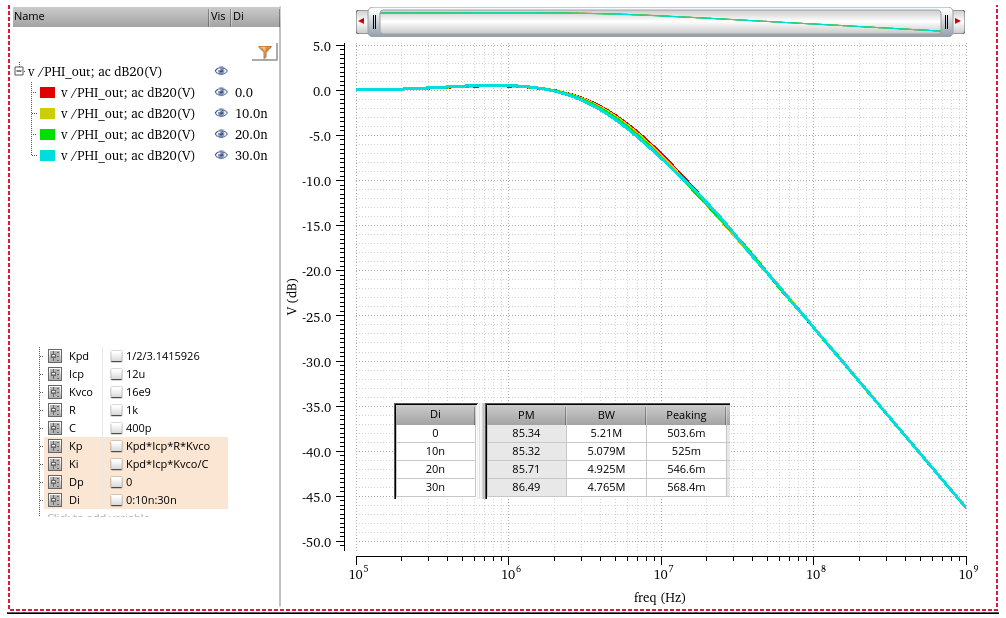
A. Amirkhany, "Basics of Clock and Data Recovery Circuits: Exploring
High-Speed Serial Links," in IEEE Solid-State Circuits
Magazine, vol. 12, no. 1, pp. 25-38, Winter 2020 [https://sci-hub.jp/10.1109/MSSC.2019.2939342]
—, ISSCC2019 T6: "Basics of Clock and Data Recovery Circuits"
Fulvio Spagna, CICC2018 Clock and Data Recovery Systems [pdf]
Wei-Zen Chen, ISSCC2026. T9: Clocking and CDR Techniques for
High-Performance Wireline Transceiver
A. Sharif-Bakhtiar, A. Chan Carusone, "A Methodology for Accurate DFE
Characterization," IEEE RFIC Symposium, Philadelphia,
Pennsylvania, June 2018. [PDF]
[Slides
– PDF]
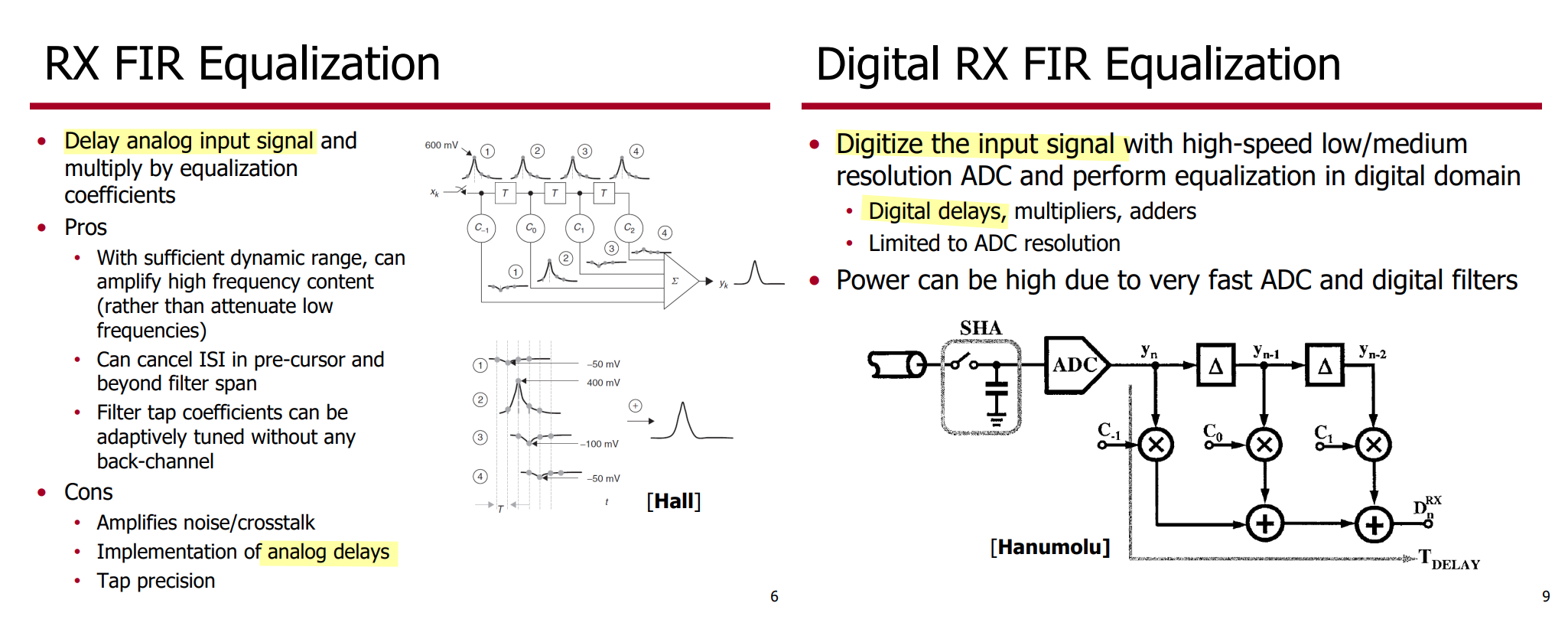
S. Kiran, S. Cai, Y. Zhu, S. Hoyos and S. Palermo, "Digital
Equalization With ADC-Based Receivers: Two Important Roles Played by
Digital Signal Processingin Designing Analog-to-Digital-Converter-Based
Wireline Communication Receivers," in IEEE Microwave Magazine,
vol. 20, no. 5, pp. 62-79, May 2019 [https://sci-hub.se/10.1109/MMM.2019.2898025]
K. K. Parhi, "Design of multigigabit multiplexer-loop-based decision
feedback equalizers," in IEEE Transactions on Very Large Scale
Integration (VLSI) Systems, vol. 13, no. 4, pp. 489-493, April 2005
[http://sci-hub.se/10.1109/TVLSI.2004.842935]
T. Toifl et al., "A 3.5pJ/bit 8-tap-feed-forward
8-tap-decision feedback digital equalizer for 16Gb/s I/Os," ESSCIRC
2014 - 40th European Solid State Circuits Conference (ESSCIRC),
Venice Lido, Italy, 2014 [https://sci-hub.se/10.1109/ESSCIRC.2014.6942120]
J. Liang, A. Sheikholeslami, H. Tamura, Y. Ogata and H. Yamaguchi,
"Loop Gain Adaptation for Optimum Jitter Tolerance in Digital CDRs," in
IEEE Journal of Solid-State Circuits, vol. 53, no. 9, pp.
2696-2708, Sept. 2018 [https://sci-hub.jp/10.1109/JSSC.2018.2839038]
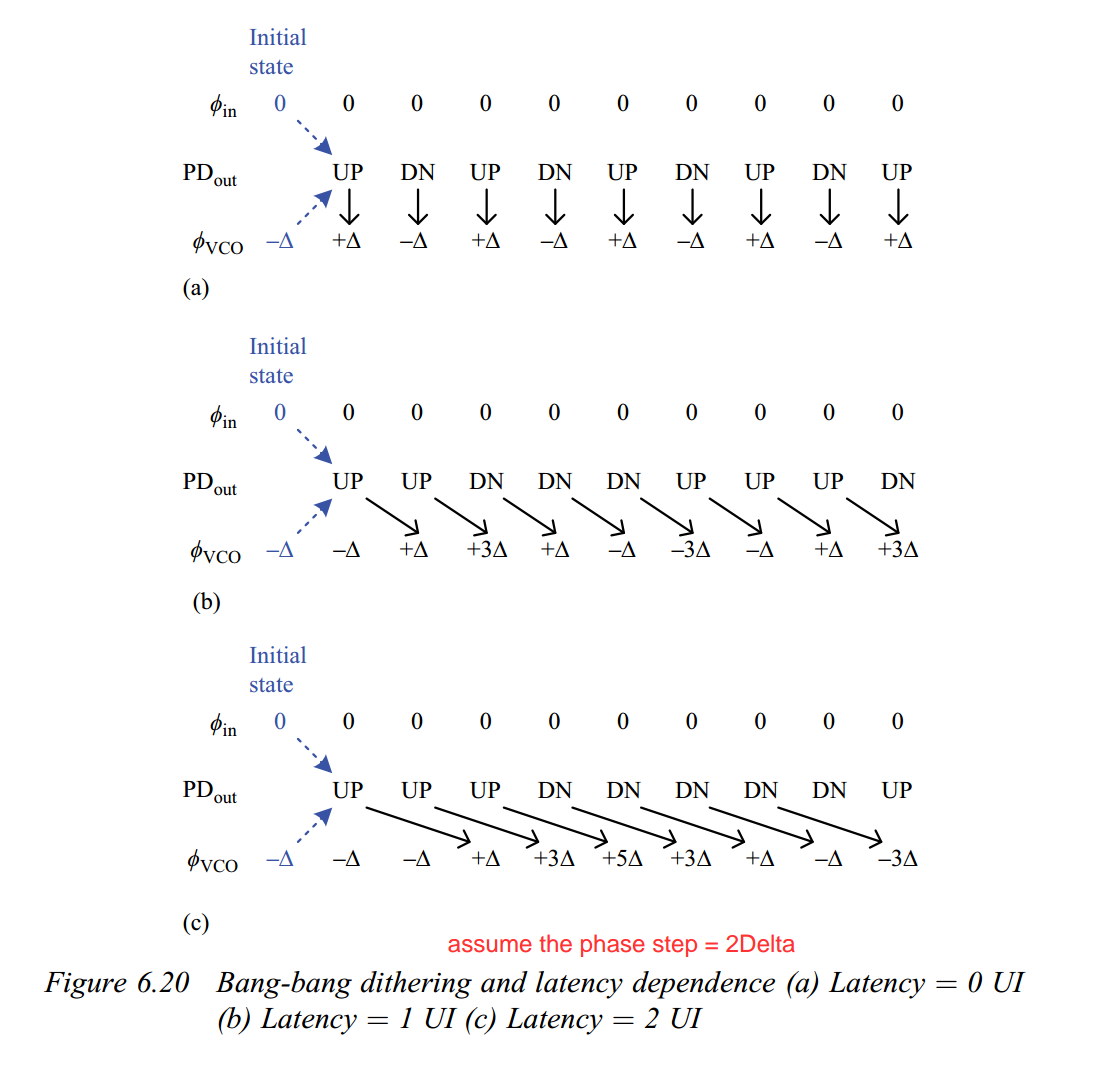
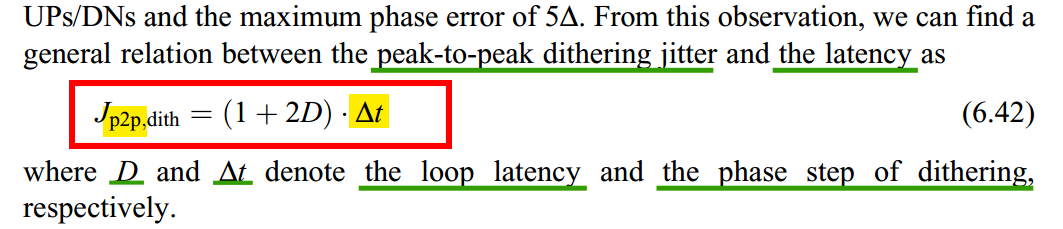
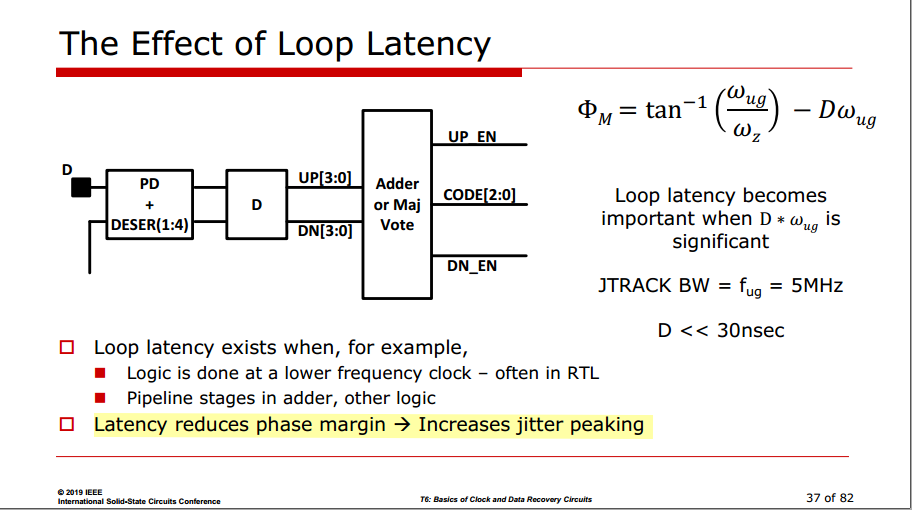
Hunting jitter is often referred to as
dithering jitter, the periodic time
error between data clock and input data, which exhibits a
limit-cycle behavior
BB PD
Youngdon Choi, Deog-Kyoon Jeong and W. Kim, "Jitter transfer analysis
of tracked oversampling techniques for multigigabit clock and data
recovery," in IEEE Transactions on Circuits and Systems II: Analog and
Digital Signal Processing, vol. 50, no. 11, pp. 775-783, Nov. 2003 [https://sci-hub.st/10.1109/TCSII.2003.819070]
John T. Stonick, ISSCC 2011 TUTORIALS T5: DPLL-Based Clock and
Data Recovery [slidestranscript]
Walker, Richard. (2003). Designing Bang-Bang PLLs for Clock and Data
Recovery in Serial Data Transmission Systems. [pdf]
—, Clock and Data Recovery for Serial Data Communications, focusing
on bang-bang CDR design methodology, ISSCC Short Course, February 2002.
[slides]
It's ternary, because early, late
and no transition
notice the transition density = 1 in
digital PLL
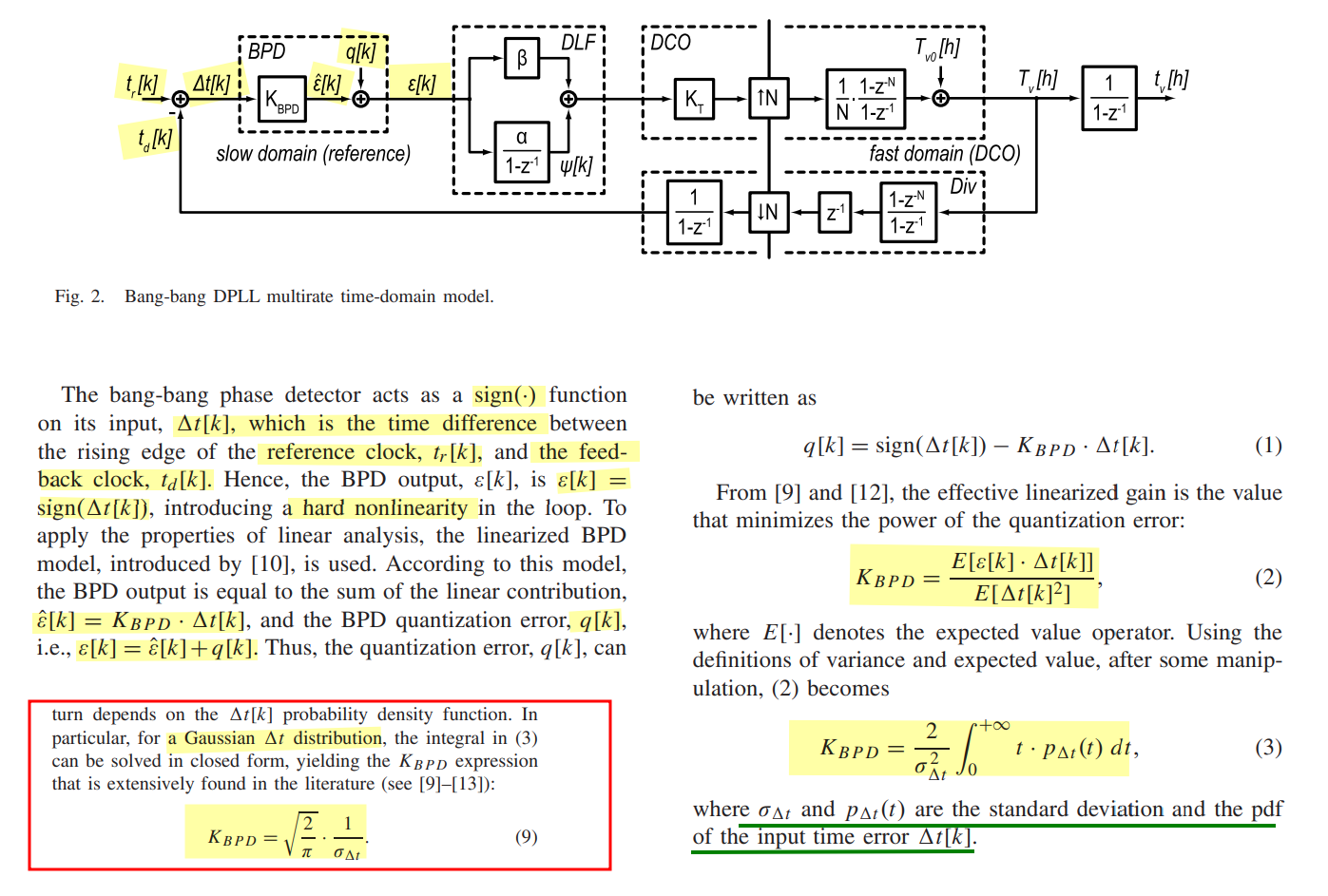
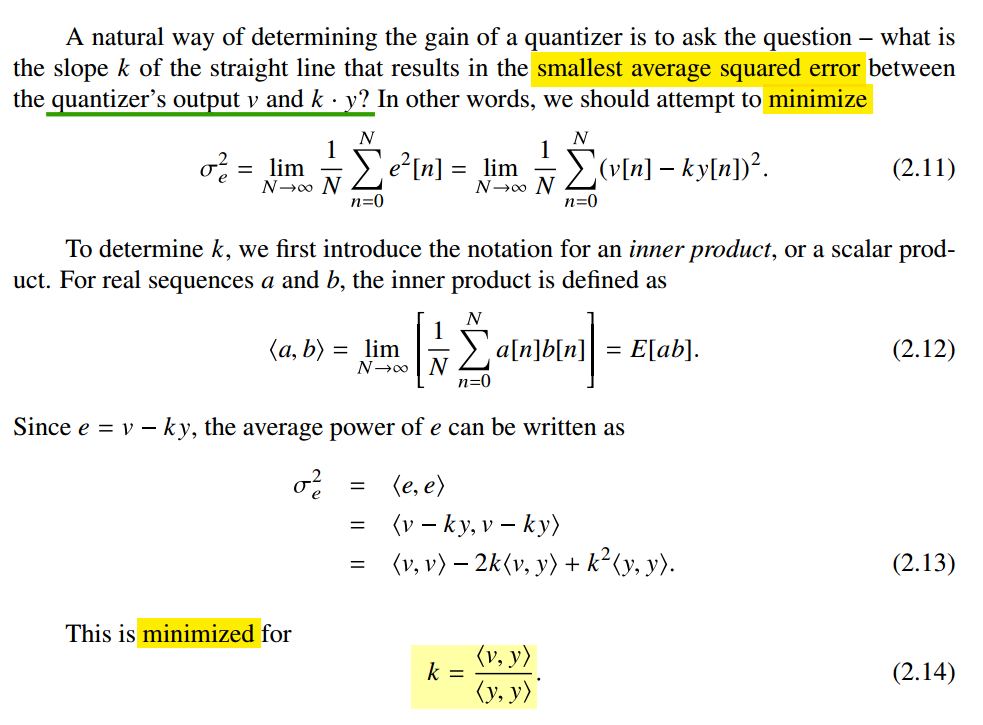
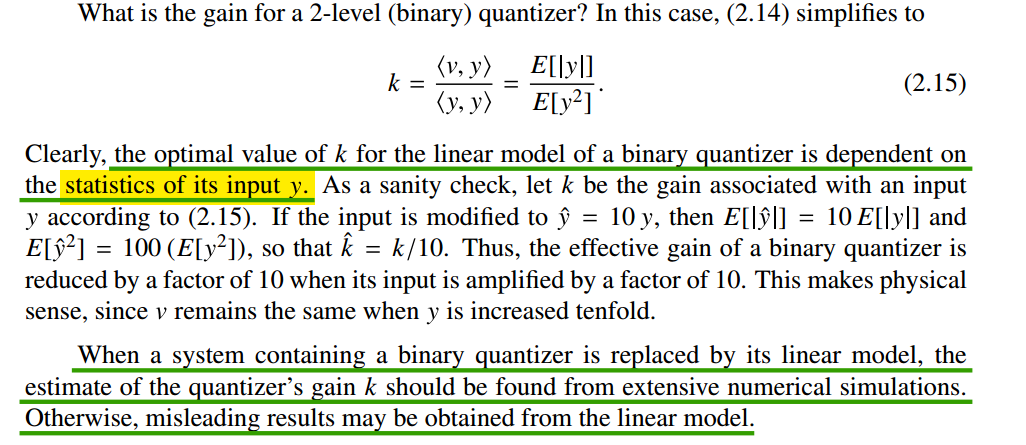
Linearization
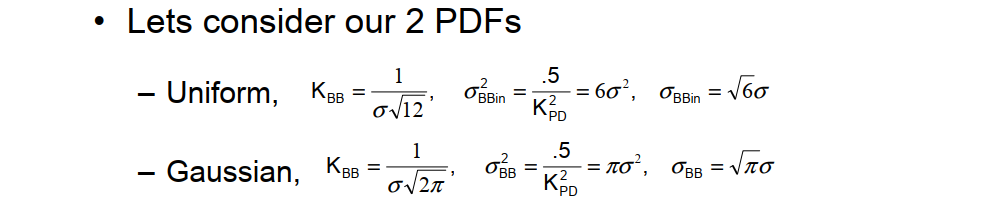
The effective PD gain is a function of the input jitter
pdf, it enables one to anticipate the effects of input jitter
on loop characteristics
BB Gain is the slope of average BB output \(\mu\), versus phase offset \(\phi\), i.e. \(\frac {\partial \mu}{\partial \phi}\),
BB only produces output for a transition and this de-rates the gain.
Transition density = 0.5 for
random data
Input referred jitter from BB PD is
proportional to incoming jitter
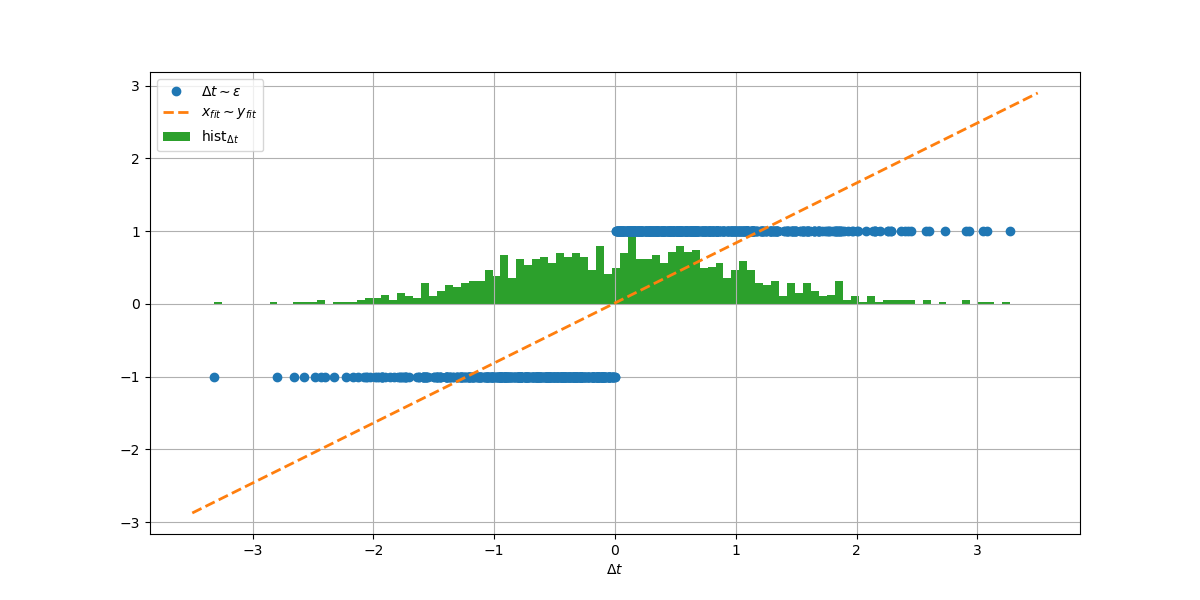
gain simulation
L. Avallone, M. Mercandelli, A. Santiccioli, M. P. Kennedy, S.
Levantino and C. Samori, "A Comprehensive Phase Noise Analysis of
Bang-Bang Digital PLLs," in IEEE Transactions on Circuits and Systems I:
Regular Papers, vol. 68, no. 7, pp. 2775-2786, July 2021 [https://sci-hub.st/10.1109/TCSI.2021.3072344]
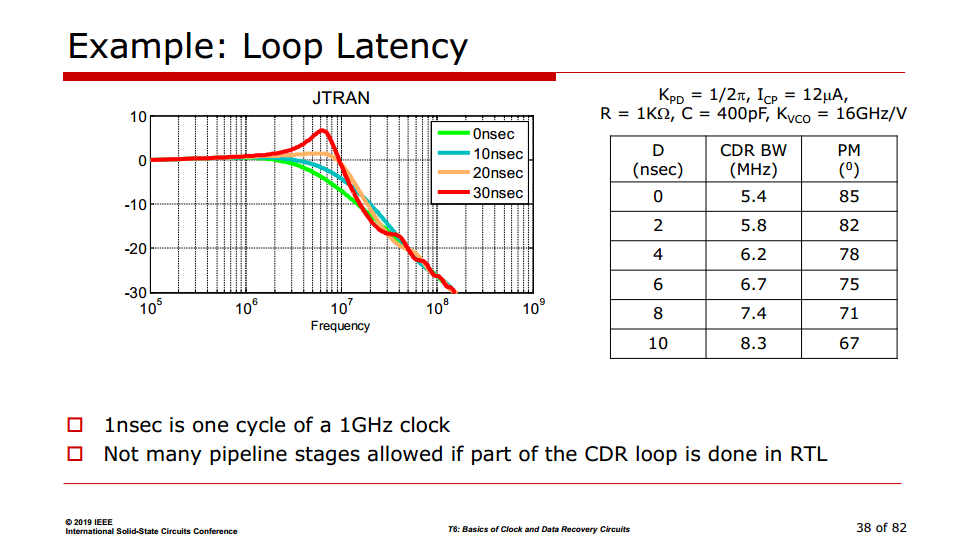
T. -K. Kuan and S. -I. Liu, "A Bang Bang Phase-Locked Loop Using
Automatic Loop Gain Control and Loop Latency Reduction Techniques," in
IEEE Journal of Solid-State Circuits, vol. 51, no. 4, pp. 821-831, April
2016 [https://sci-hub.st/10.1109/JSSC.2016.2519391]
# polyfit coef_fit = np.polyfit(dt, et, 1) print(f'coef_fit: {coef_fit}')
x = np.linspace(-3.5, 3.5, 1000) y = coef_fit[0]*x + coef_fit[1]
plt.figure(figsize=(12,6)) plt.plot(dt, et, 'o') plt.plot(x, y, linewidth=2, linestyle='--')
# Calculate histogram counts and bin edges counts, bin_edges = np.histogram(dt, bins=100) # Find the maximum count max_count = counts.max() # Create weights to normalize the maximum height to 1 weights = np.ones_like(dt) / max_count plt.hist(dt, bins=100, weights=weights)
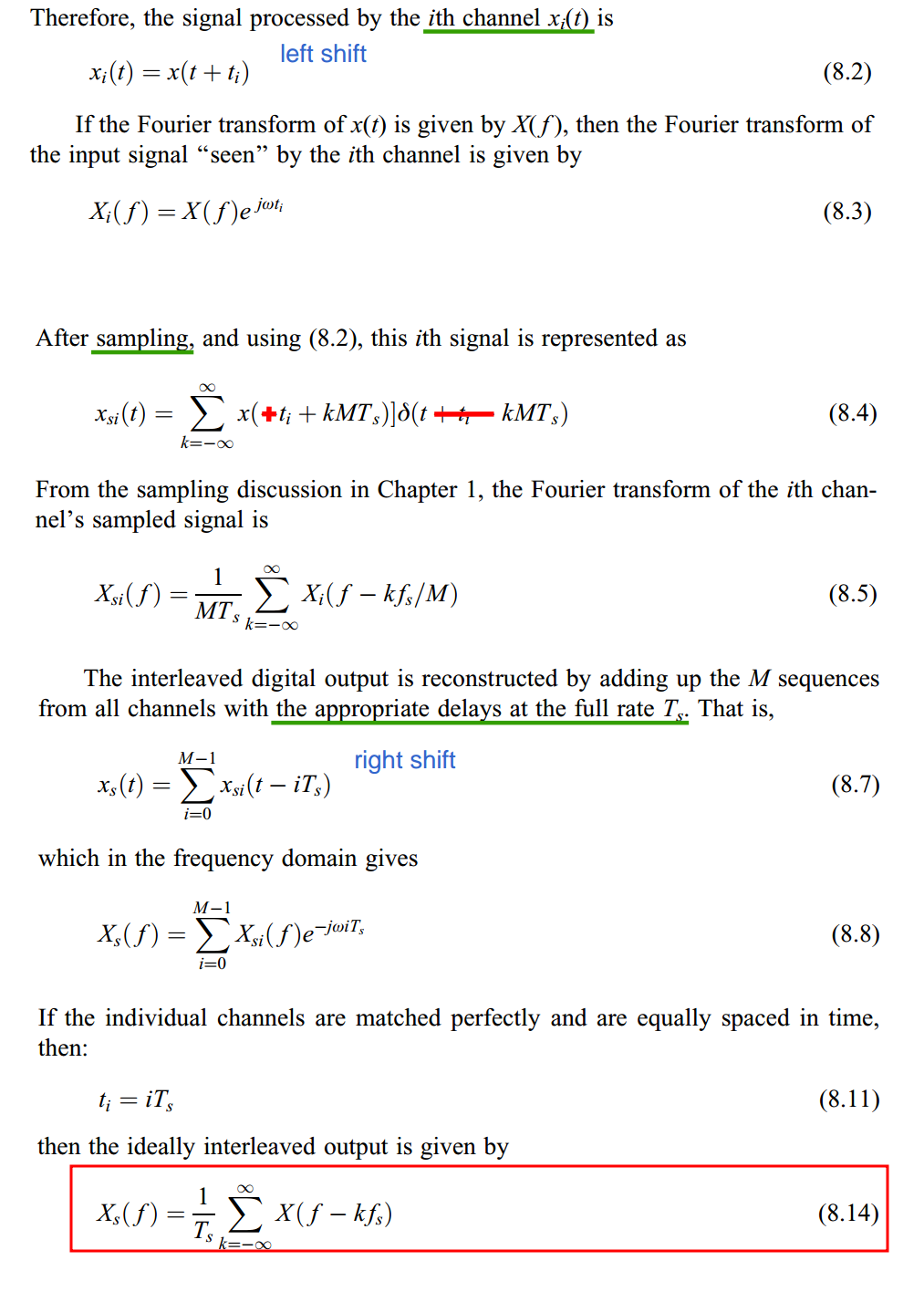
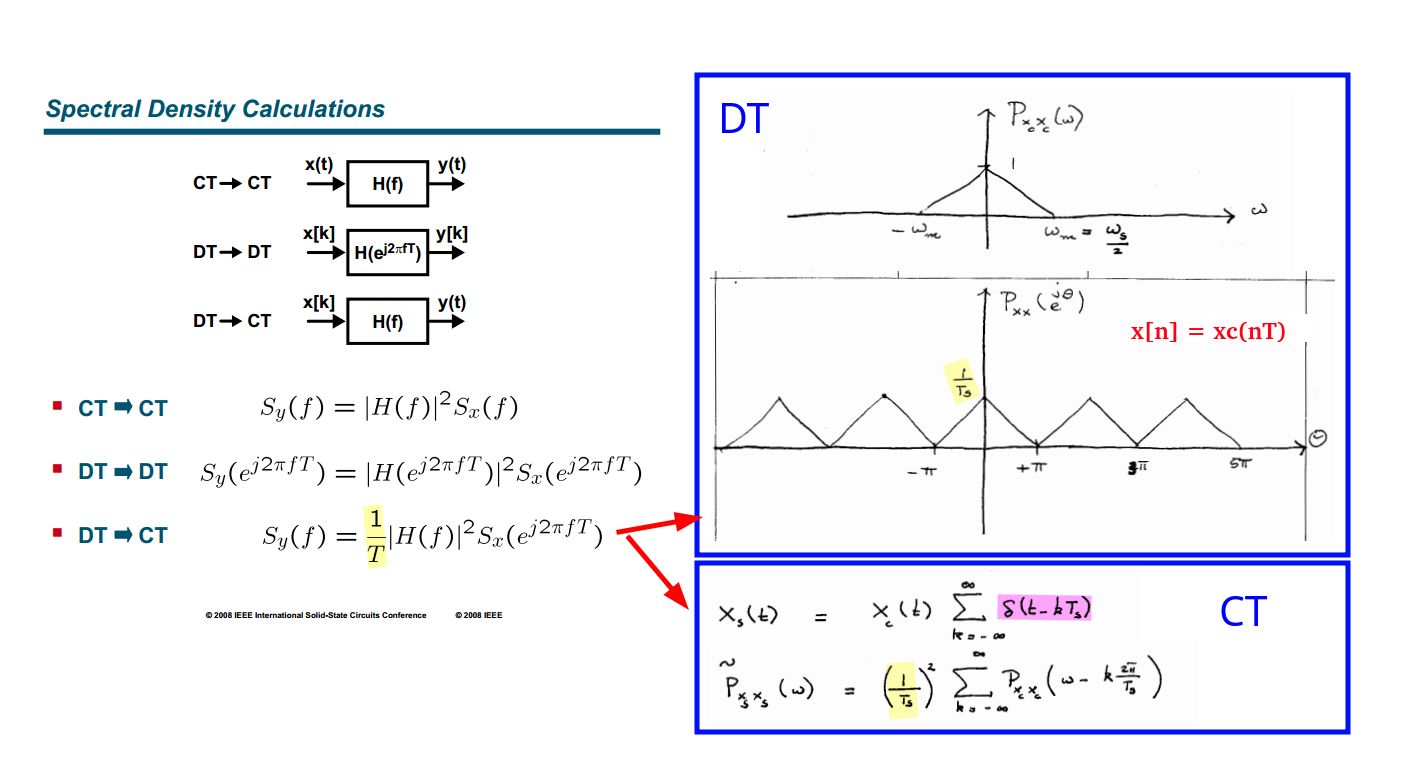
That is \[
P_{x_s x_s} (f)= \frac{1}{T_s}P_{xx}(f)
\] In going from discrete time to continuous
time, we must add a scale factor \(1/T\), the sample period
Y. Hu, T. Siriburanon and R. B. Staszewski, "Multirate Timestamp
Modeling for Ultralow-Jitter Frequency Synthesis: A Tutorial," in
IEEE Transactions on Circuits and Systems II: Express Briefs,
vol. 69, no. 7, pp. 3030-3036, July 2022
Daniel Boschen. GRCon24 - Quick Start on Control Loops with Python
Workshop [video, slides]
L. Avallone, M. Mercandelli, A. Santiccioli, M. P. Kennedy, S.
Levantino and C. Samori, "A Comprehensive Phase Noise Analysis of
Bang-Bang Digital PLLs," in IEEE Transactions on Circuits and Systems I:
Regular Papers, vol. 68, no. 7, pp. 2775-2786, July 2021 [https://sci-hub.st/10.1109/TCSI.2021.3072344]
M. Zanuso, D. Tasca, S. Levantino, A. Donadel, C. Samori and A. L.
Lacaita, "Noise Analysis and Minimization in Bang-Bang Digital PLLs," in
IEEE Transactions on Circuits and Systems II: Express Briefs, vol. 56,
no. 11, pp. 835-839, Nov. 2009 [https://sci-hub.st/10.1109/TCSII.2009.2032470]
N. Da Dalt, "Linearized Analysis of a Digital Bang-Bang PLL and Its
Validity Limits Applied to Jitter Transfer and Jitter Generation," in
IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 55,
no. 11, pp. 3663-3675, Dec. 2008 [https://sci-hub.st/10.1109/TCSI.2008.925948]
—, "Markov Chains-Based Derivation of the Phase Detector Gain in
Bang-Bang PLLs," in IEEE Transactions on Circuits and Systems II:
Express Briefs, vol. 53, no. 11, pp. 1195-1199, Nov. 2006 [https://sci-hub.st/10.1109/TCSII.2006.883197]
—, "A design-oriented study of the nonlinear dynamics of digital
bang-bang PLLs," in IEEE Transactions on Circuits and Systems I:
Regular Papers, vol. 52, no. 1, pp. 21-31, Jan. 2005 [https://sci-hub.se/10.1109/TCSI.2004.840089]
—, "Theory and Implementation of Digital Bang-Bang Frequency
Synthesizers for High Speed Serial Data Communications", PhD
Dissertation, RWTH Aachen University, Aachen, North Rhine-Westphalia,
Germany, 2007 [pdf]
Walker, Richard. (2003). Designing Bang-Bang PLLs for Clock and Data
Recovery in Serial Data Transmission Systems. [paper,slides]
hunting jitter
S. Jang, S. Kim, S. -H. Chu, G. -S. Jeong, Y. Kim and D. -K. Jeong,
"An Optimum Loop Gain Tracking All-Digital PLL Using Autocorrelation of
Bang–Bang Phase-Frequency Detection," in IEEE Transactions on Circuits
and Systems II: Express Briefs, vol. 62, no. 9, pp. 836-840, Sept. 2015
[https://sci-hub.st/10.1109/TCSII.2015.2435691]
[phd
thesis]
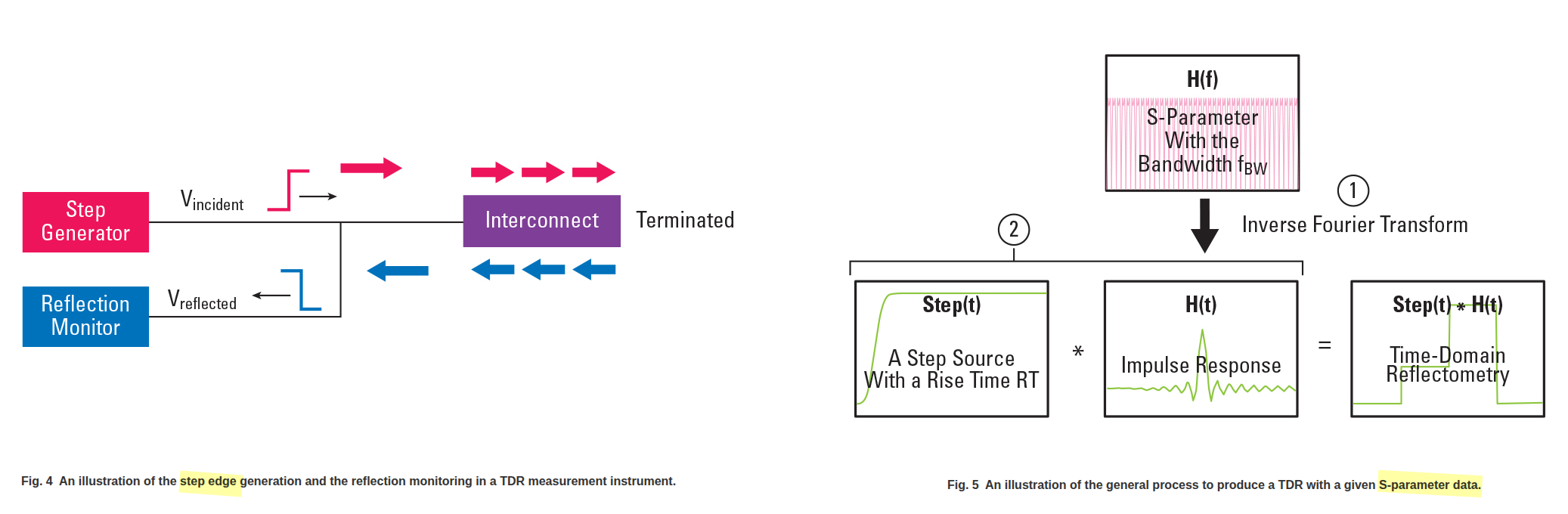
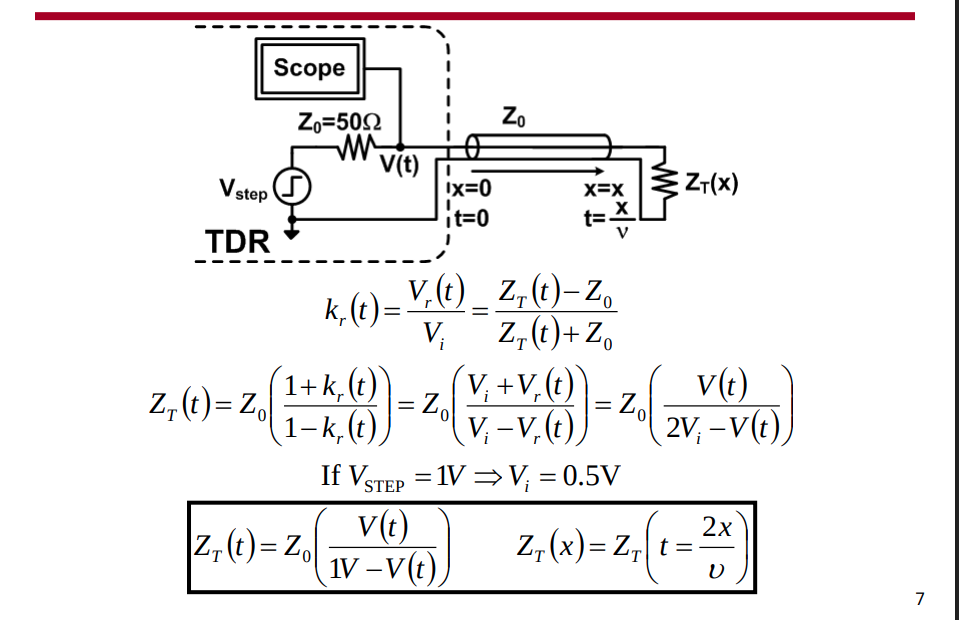
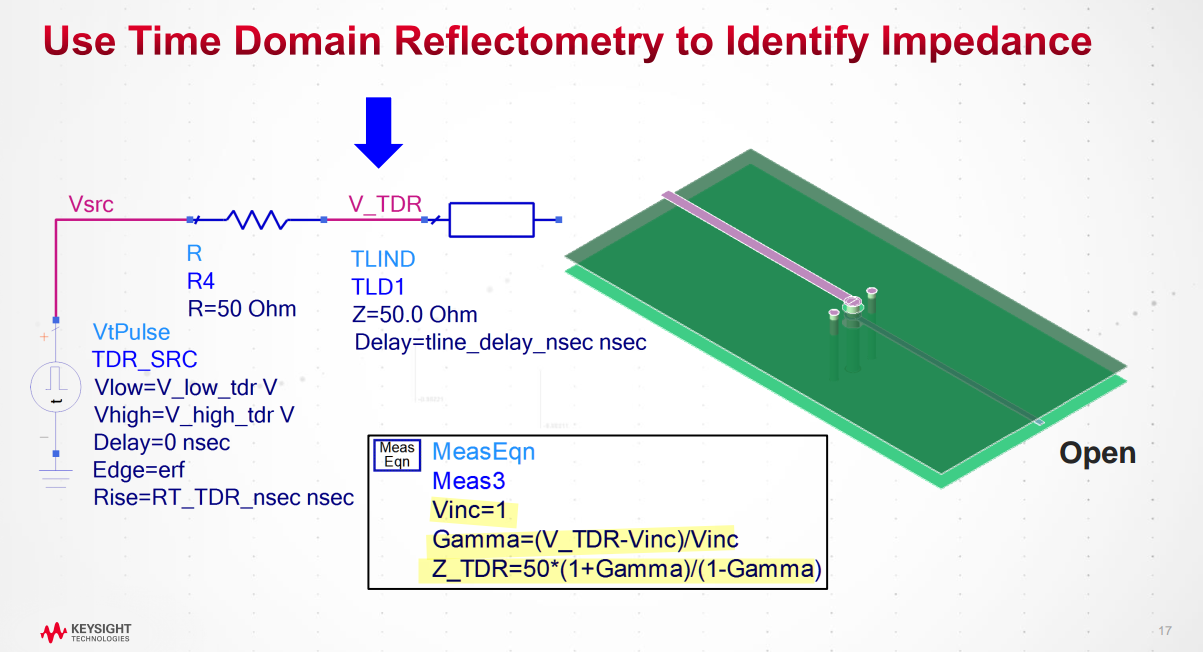
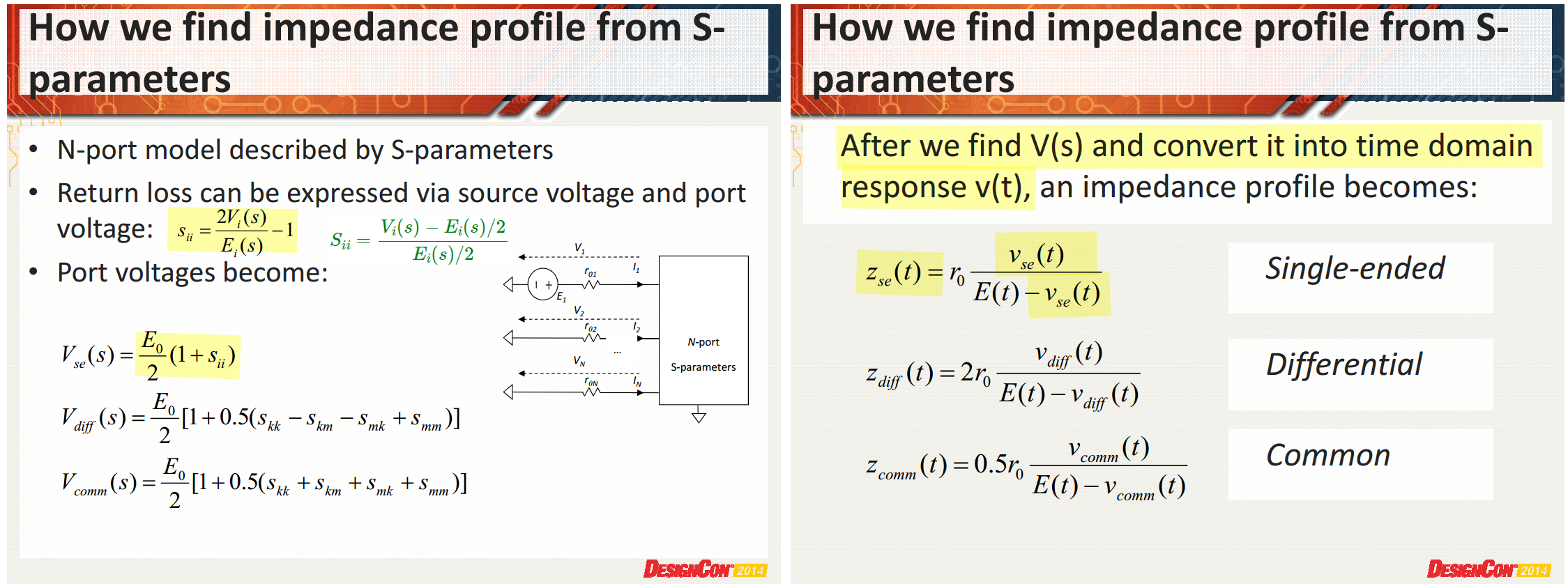
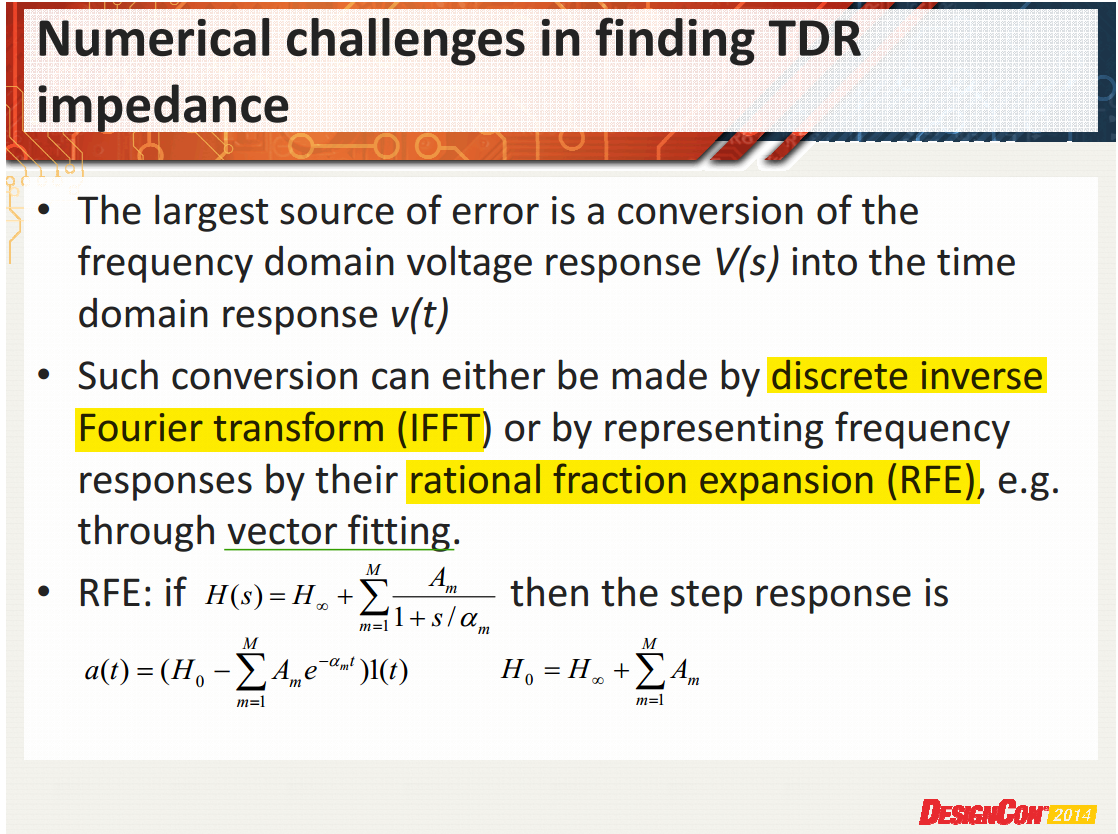
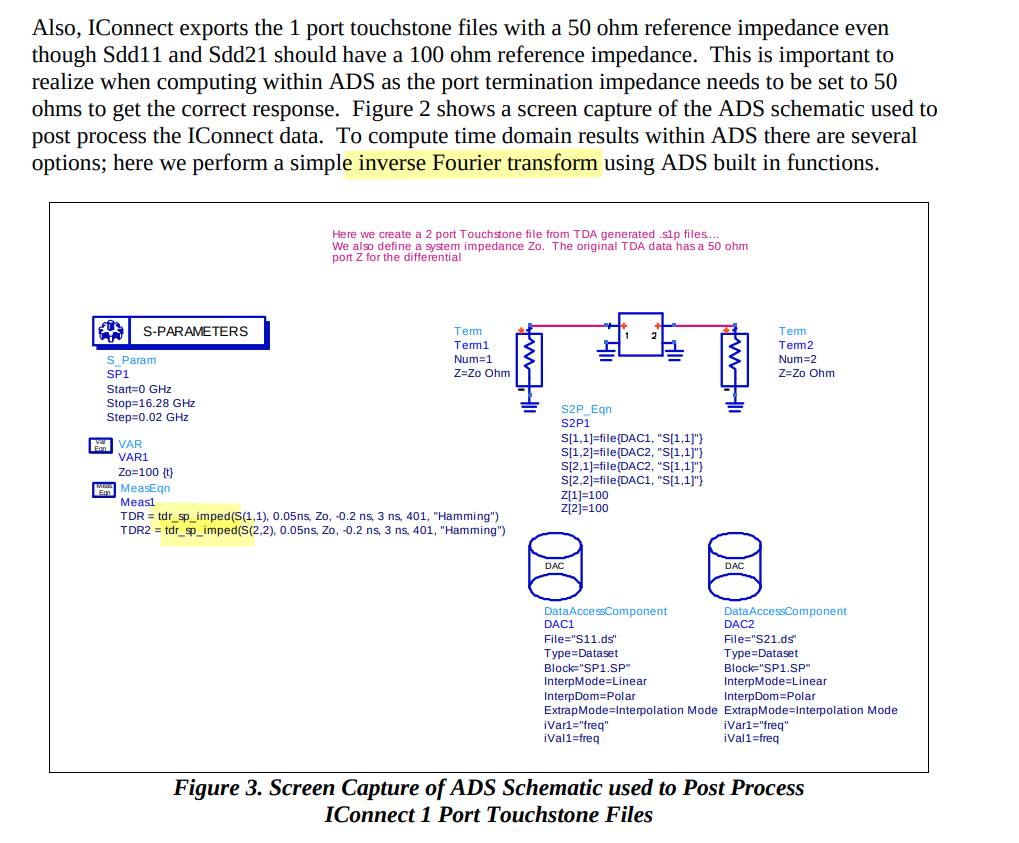
Vladimir Dmitriev-Zdorov, Mentor Graphics, DesignCon 2014,
Computation of Time Domain Impedance Profile from S-Parameters:
Challenges and Methods [link]
# Pseudo code, laying out the essential steps only # Trace data is in x_values sampling_interval = np.mean(np.diff(x_values)) # First derivative diff_gamma_values = np.gradient(gamma_values) # FFT fourier_data = fft(diff_gama_values) # Get the frequencies corresponding to the FFT result frequencies = np.fft.fftfreq(len(diff_gama_values), d=sampling_interval) # Calculate the magnitude of the complex Fourier transform data magnitude = np.abs(fourier_data) # Return loss magnitude = 20 * np.log10(magnitude) # Plot (frequency, magnitude)
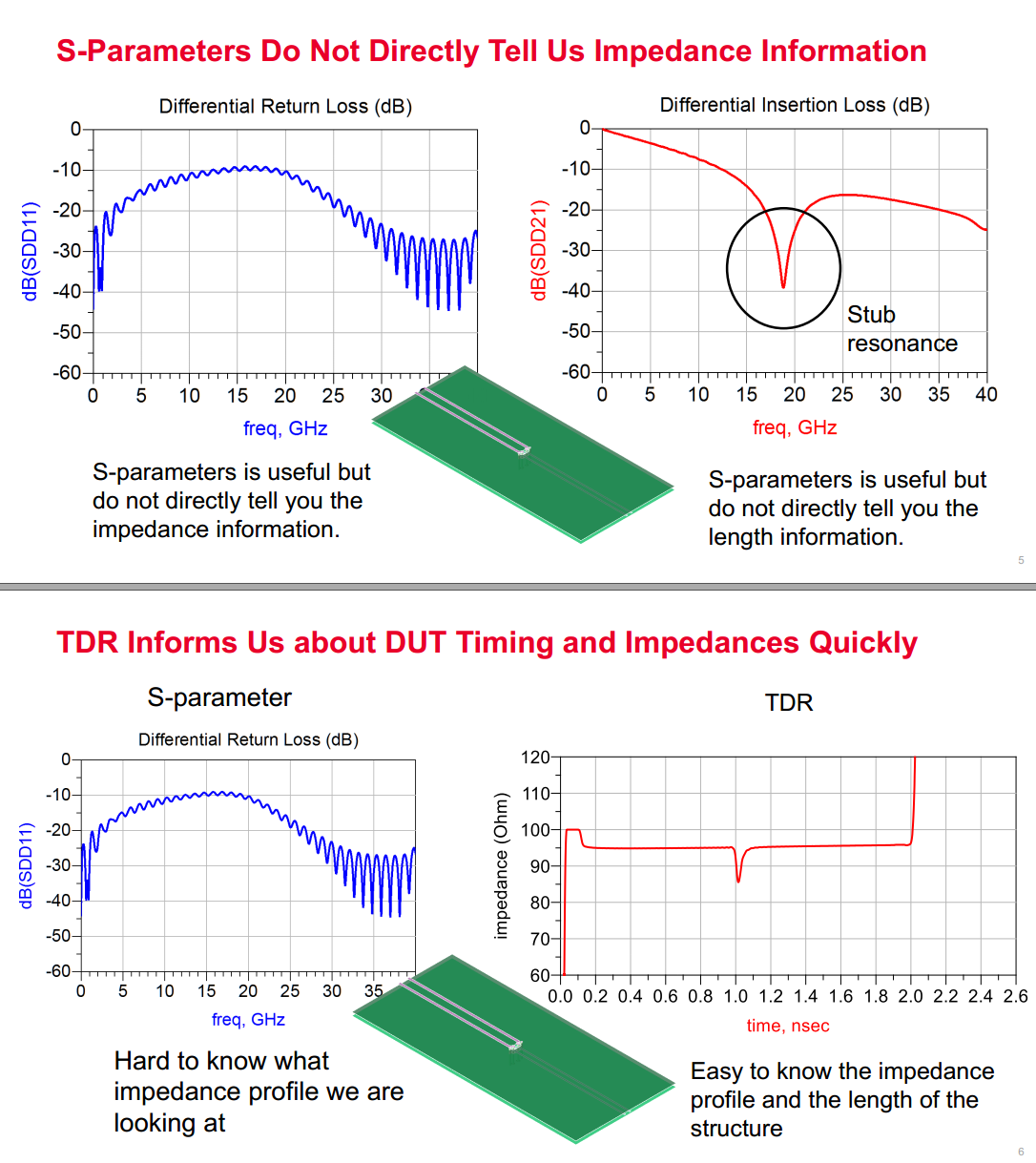
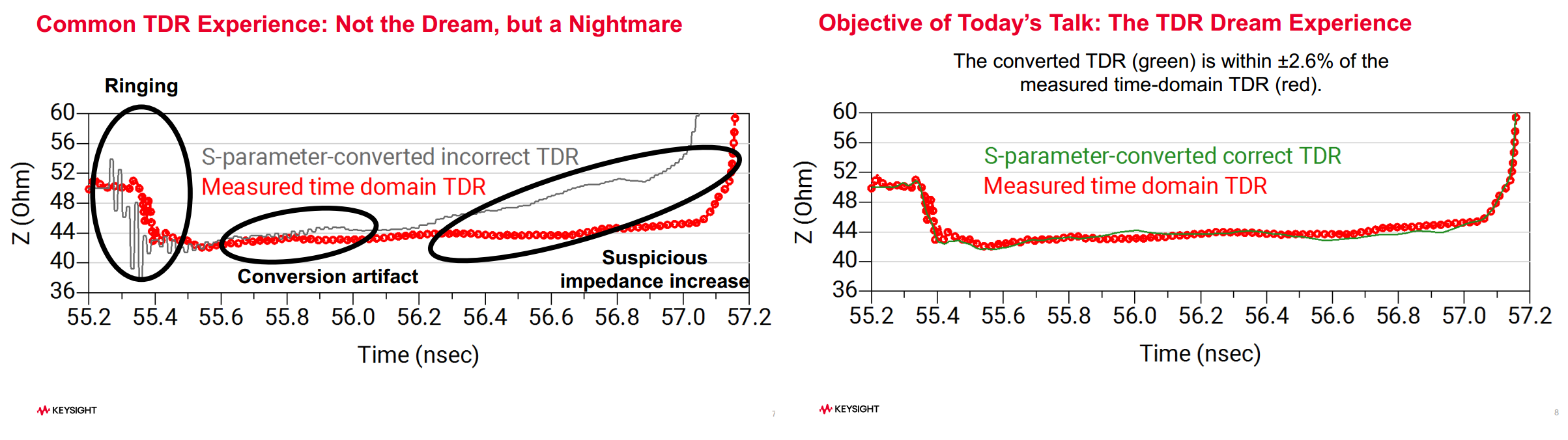
In principle, both methods should yield identical impedance profiles.
In practice, differences in S-parameter quality, bandwidth, and
simulation setup can lead to noticeable discrepancies. The poor quality
of the S-parameter data and improper simulation parameters caused the
two traces to differ
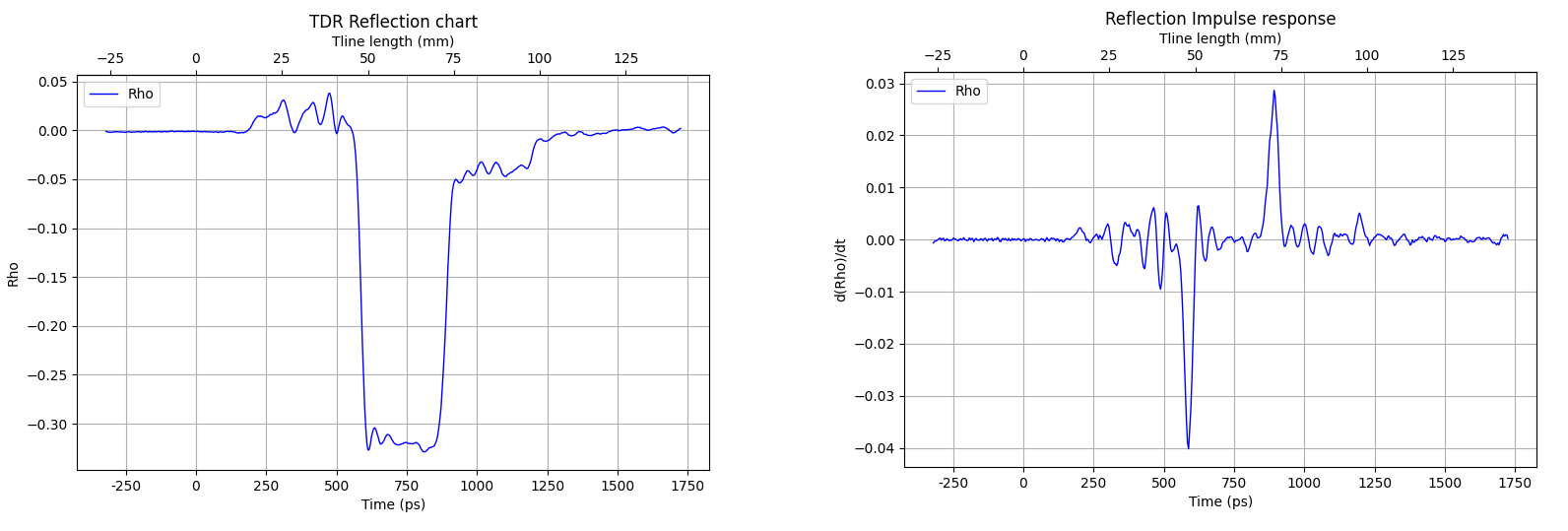
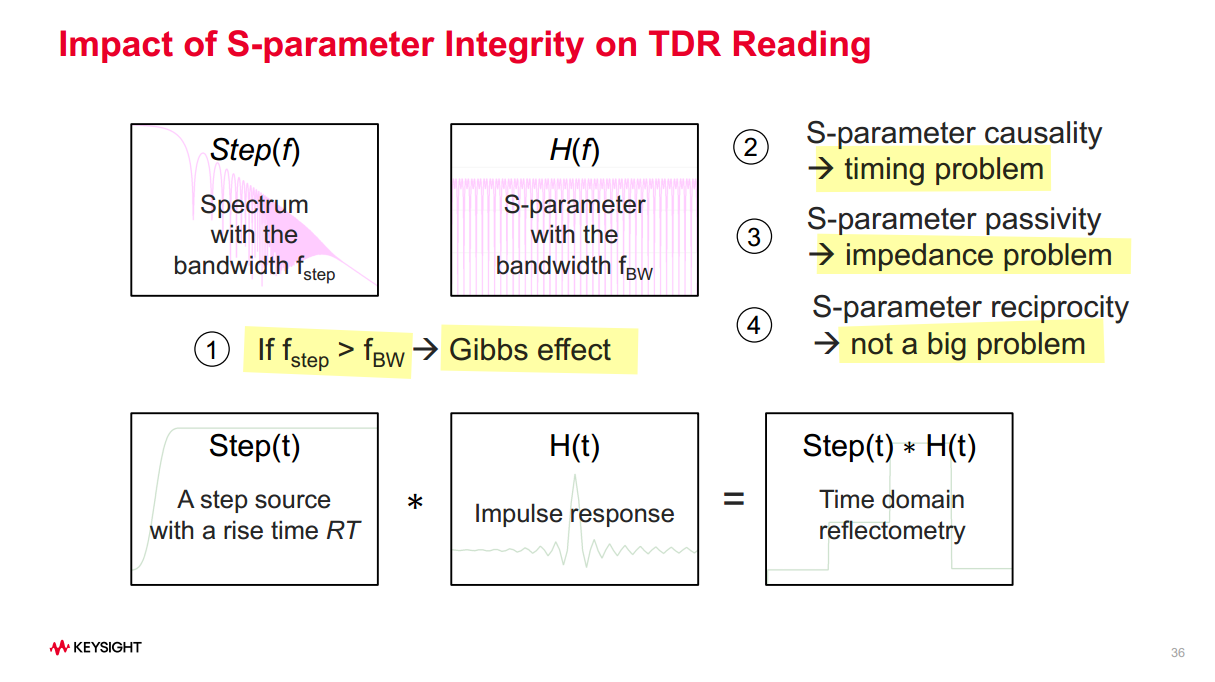
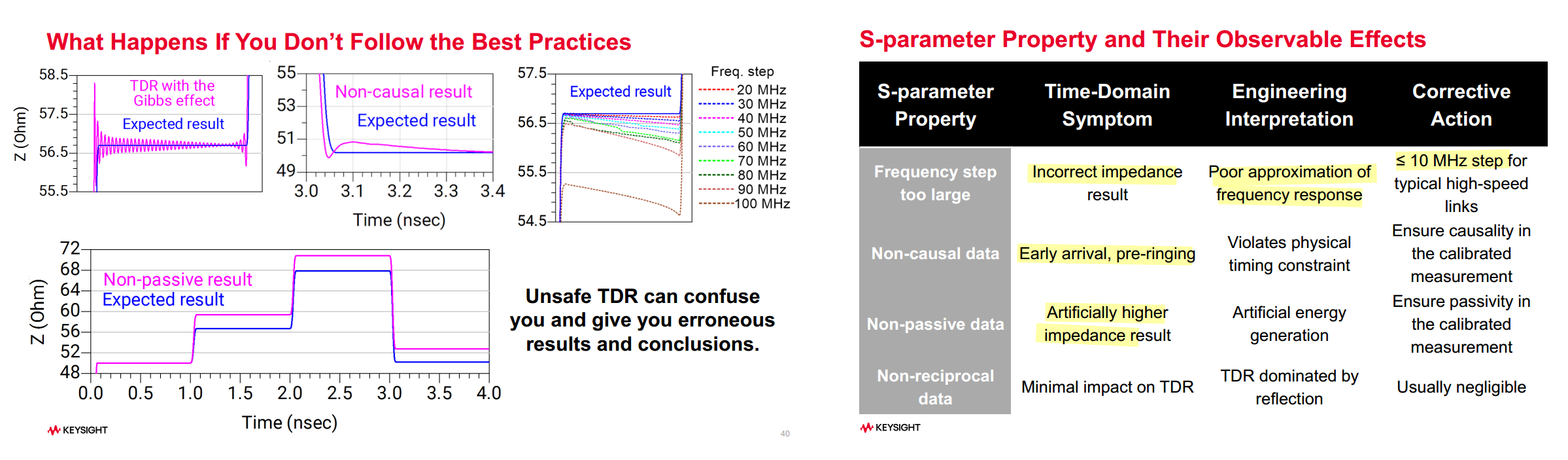
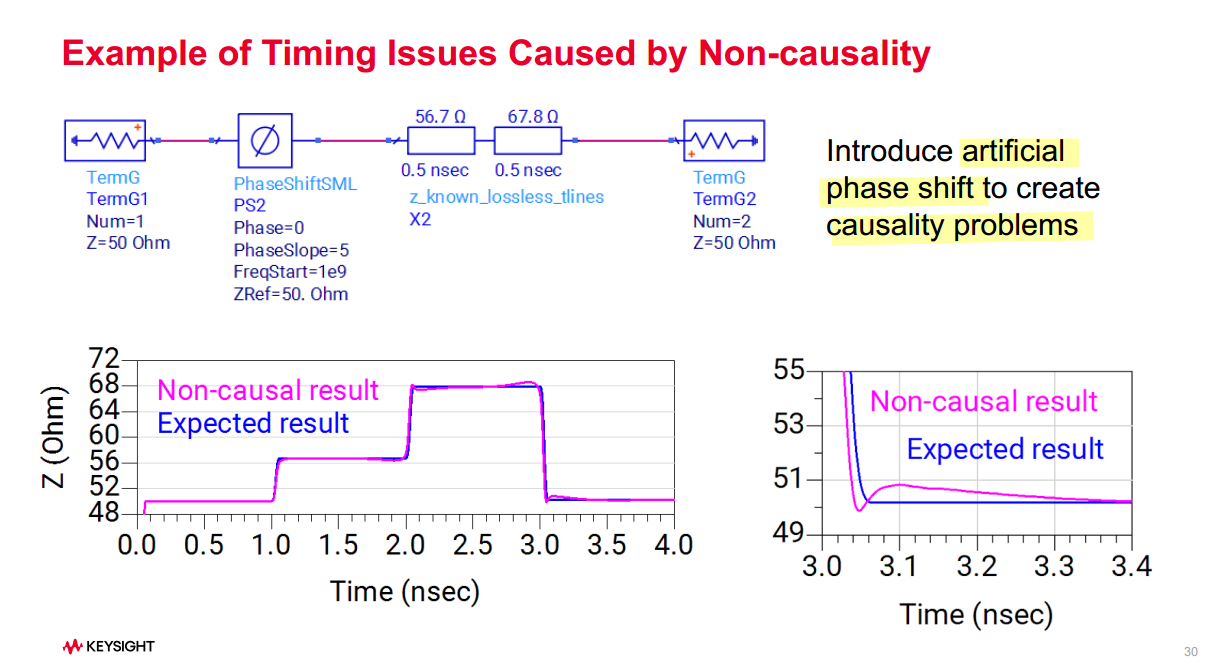
Non-causal data — Early arrival, pre-ringing
\[
\boxed{S(t) = \int_{-\infty}^{t} h(\tau) d\tau, \text{ with } S(\infty)
= H(0)}
\] pure phase manipulation (linear phase or nonlinear phase)
preserves the total area, and the TDR settles to the same final
impedance on the flat sections
Bogatin, Eric. 2020. Bogatin’s Practical Guide to Transmission
Line Design and Characterization for Signal Integrity Applications /
.Eric Bogatin. Artech House.
keysight, Signal Integrity Characterization Techniques [pdf]
Tim Wang-Lee, DesignCon 2026 KEF: Mastering TDR and De-embedding
Through Simulation and Measurement [link]
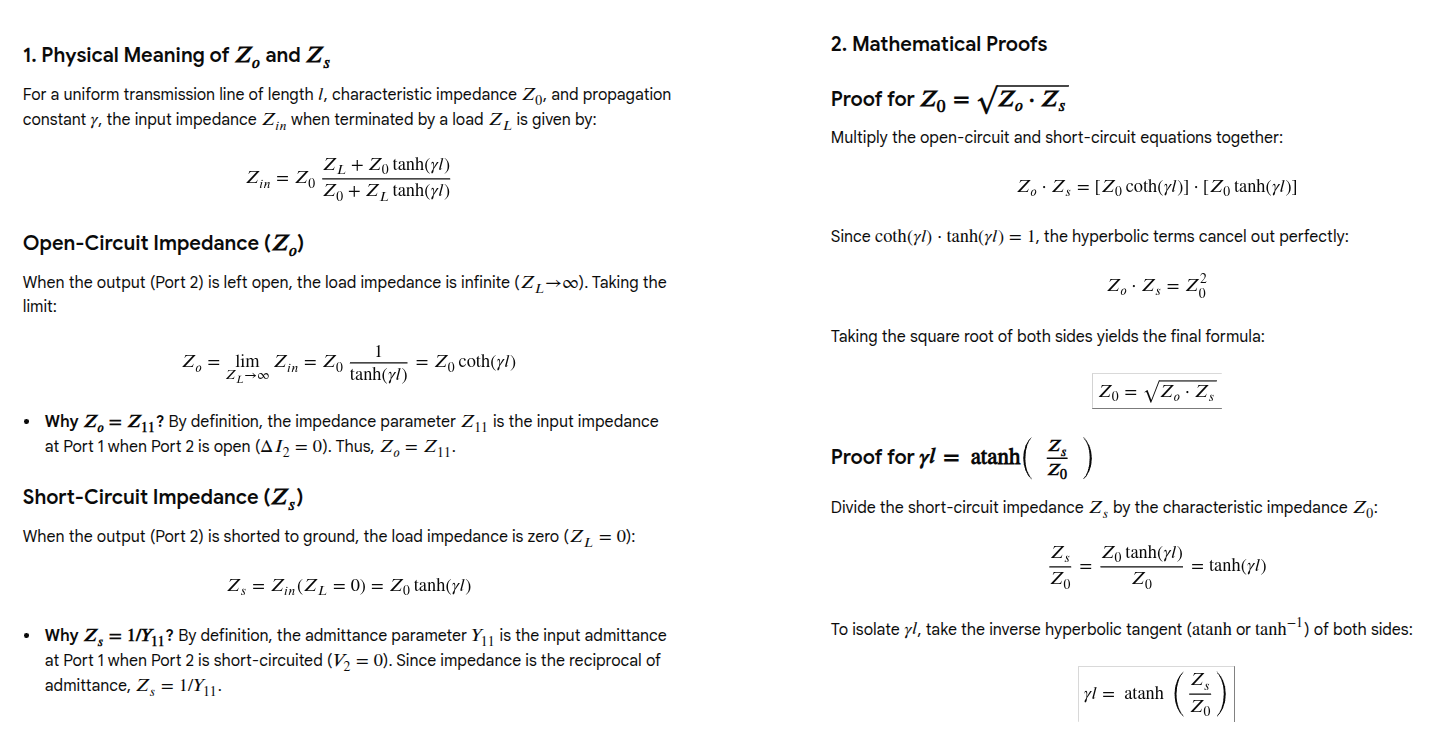
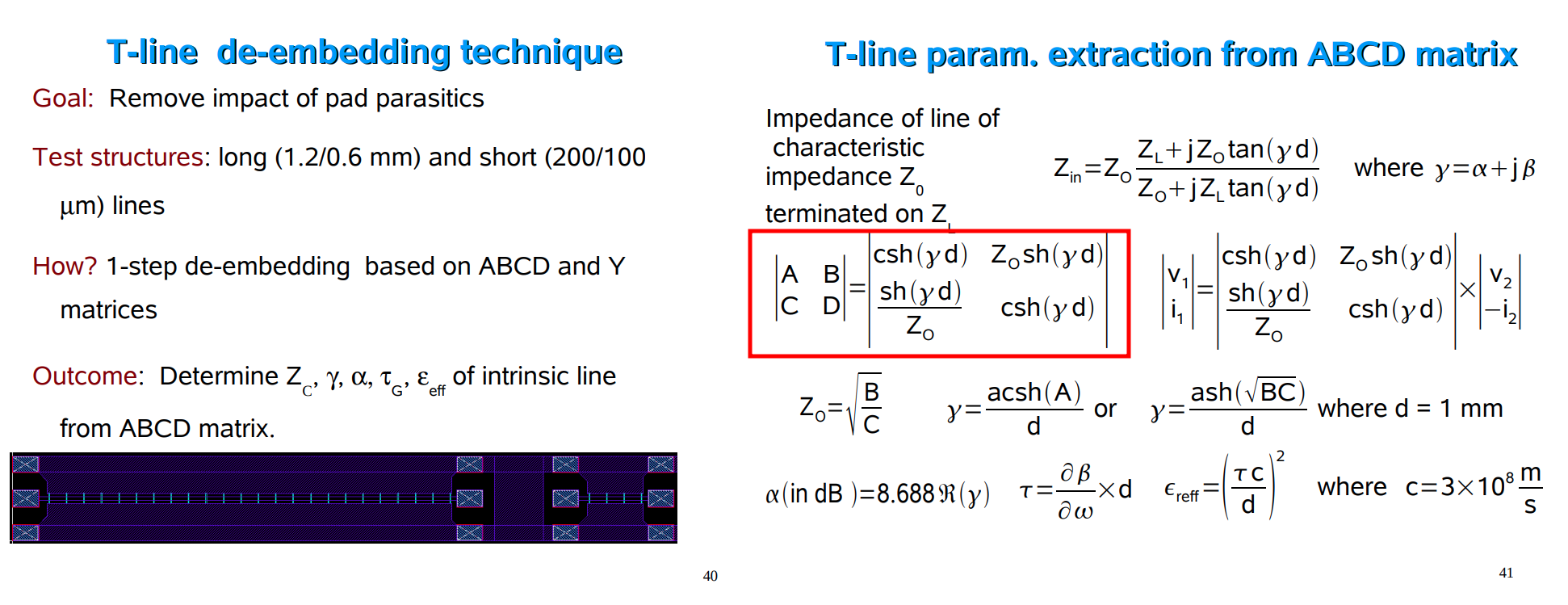
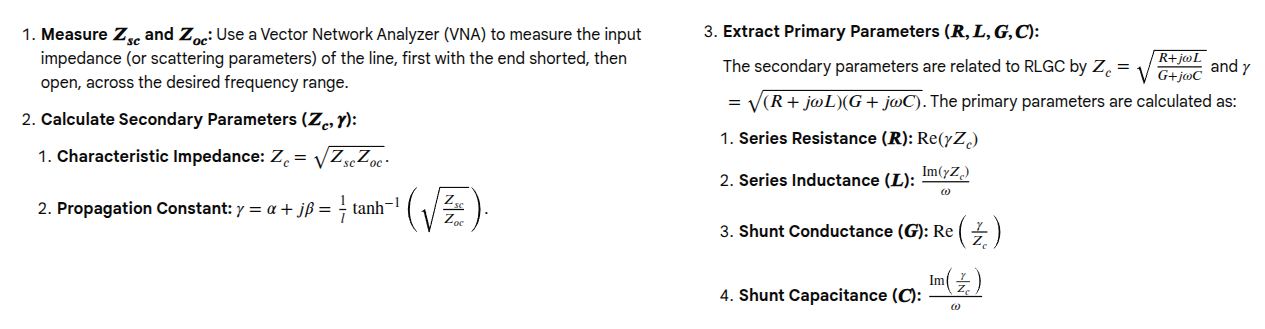
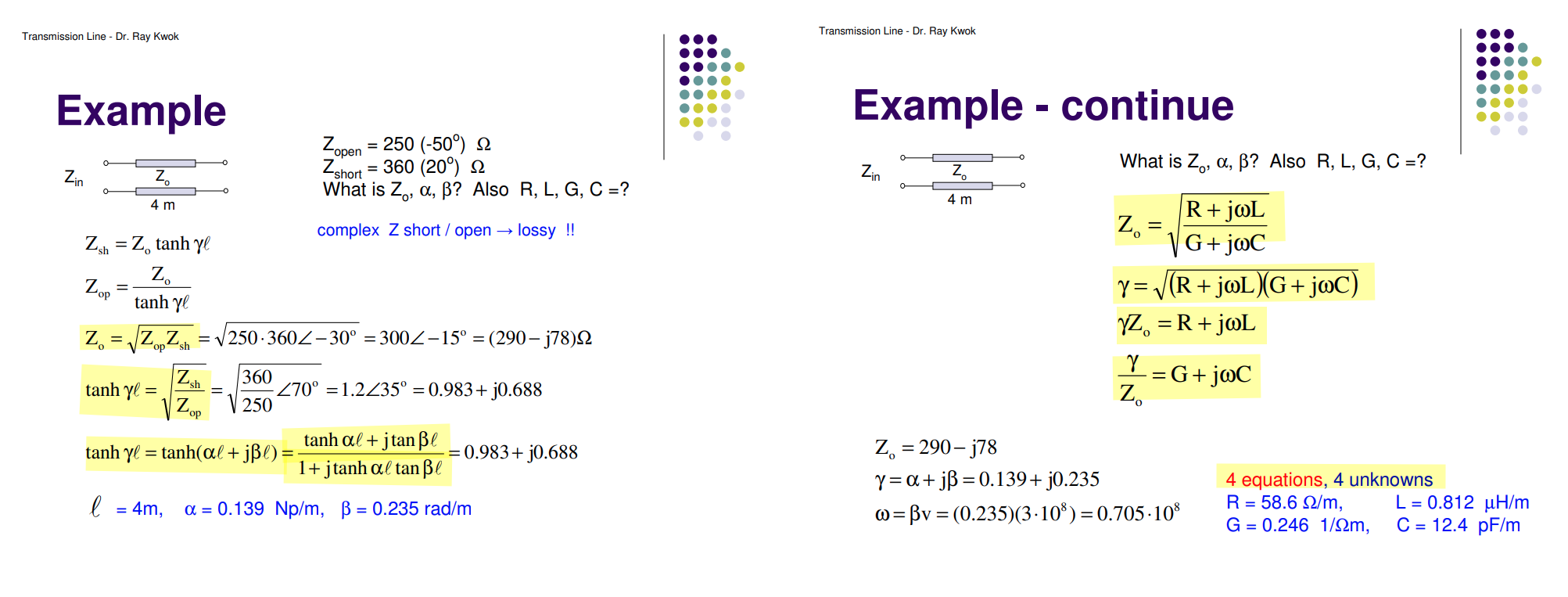
RLGC can be extracted from measurements of a
transmission line's input impedance under open-circuit
and short-circuit terminations at a specific
frequency
# input data, must be 2-port S2P data sub = rf.Network(args.s2p, z0=args.z0_ohm)
# physical length must be supplied by user length = args.l_um*1e-6
# target frequency for pi model extraction f_target = args.f_ghz*1e9
assert f_target < freq.stop
# get index for exctraction f = freq.f ftarget_index = rf.find_nearest_index(freq.f, f_target) omega = 2*np.pi*f[ftarget_index]
z11=sub.z[0::,0,0] # z11, the open impedance y11=sub.y[0::,0,0] # 1/y11, the short impedance Zline = np.sqrt(z11/y11) # characteristic impedance of the line
R = (gamma_ftarget*Zline_ftarget).real L = (gamma_ftarget*Zline_ftarget).imag / omega G = (gamma_ftarget/Zline_ftarget).real C = (gamma_ftarget/Zline_ftarget).imag / omega
Raymond Y. Chen, Raymond Y. Chen. Fundamentals of S Fundamentals of
S-Parameter Parameter Modeling for Power Distribution Modeling for Power
Distribution System (PDS) and SSO Analysis System (PDS) and SSO Analysis
[https://ibis.org/summits/jun05/chen.pdf]